 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolar Open Technical Report
Jan 11, 2026We introduce Solar Open, a 102B-parameter bilingual Mixture-of-Experts language model for underserved languages. Solar Open demonstrates a systematic methodology for building competitive LLMs by addressing three interconnected challenges. First, to train effectively despite data scarcity for underserved languages, we synthesize 4.5T tokens of high-quality, domain-specific, and RL-oriented data. Second, we coordinate this data through a progressive curriculum jointly optimizing composition, quality thresholds, and domain coverage across 20 trillion tokens. Third, to enable reasoning capabilities through scalable RL, we apply our proposed framework SnapPO for efficient optimization. Across benchmarks in English and Korean, Solar Open achieves competitive performance, demonstrating the effectiveness of this methodology for underserved language AI development.
SOLAR 10.7B: Scaling Large Language Models with Simple yet Effective Depth Up-Scaling
Dec 29, 2023



We introduce SOLAR 10.7B, a large language model (LLM) with 10.7 billion parameters, demonstrating superior performance in various natural language processing (NLP) tasks. Inspired by recent efforts to efficiently up-scale LLMs, we present a method for scaling LLMs called depth up-scaling (DUS), which encompasses depthwise scaling and continued pretraining. In contrast to other LLM up-scaling methods that use mixture-of-experts, DUS does not require complex changes to train and inference efficiently. We show experimentally that DUS is simple yet effective in scaling up high-performance LLMs from small ones. Building on the DUS model, we additionally present SOLAR 10.7B-Instruct, a variant fine-tuned for instruction-following capabilities, surpassing Mixtral-8x7B-Instruct. SOLAR 10.7B is publicly available under the Apache 2.0 license, promoting broad access and application in the LLM field.
Machine-Learning Approach to Analyze the Status of Forklift Vehicles with Irregular Movement in a Shipyard
Oct 12, 2020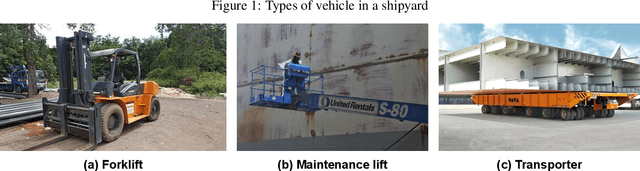
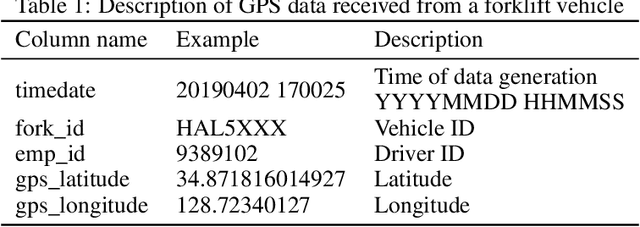
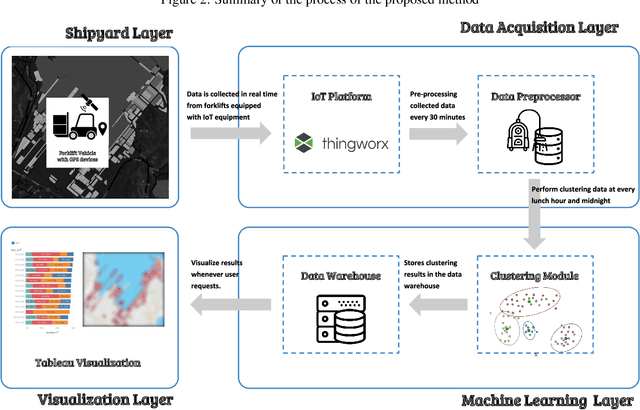
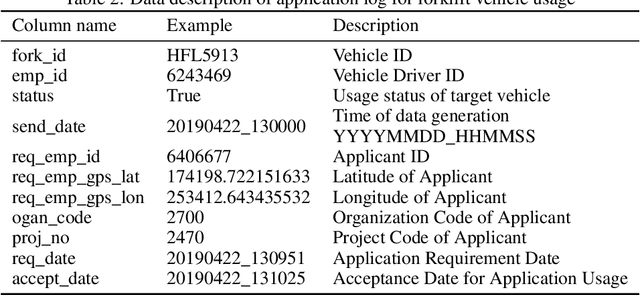
In large shipyards, the management of equipment, which are used for building a variety of ships, is critical. Because orders vary year to year, shipyard managers are required to determine methods to make the most of their limited resources. A particular difficulty that arises because of the nature and size of shipyards is the management of moving vehicles. In recent years, shipbuilding companies have attempted to manage and track the locations and movements of vehicles using Global Positioning System (GPS) modules. However, because certain vehicles, such as forklifts, roam irregularly around a yard, identifying their working status without being onsite is difficult. Location information alone is not sufficient to determine whether a vehicle is working, moving, waiting, or resting. This study proposes an approach based on machine learning to identify the work status of each forklift. We use the DBSCAN and k-means algorithms to identify the area in which a particular forklift is operating and the type of work it is performing. We developed a business intelligence system to collect information from forklifts equipped with GPS and Internet of Things (IoT) devices. The system provides visual information on the status of individual forklifts and helps in the efficient management of their movements within large shipyards.
A Deep Patent Landscaping Model using Transformer and Graph Convolutional Network
Mar 14, 2019
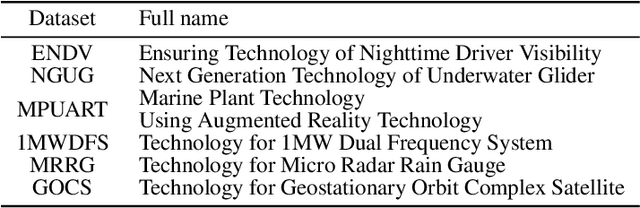

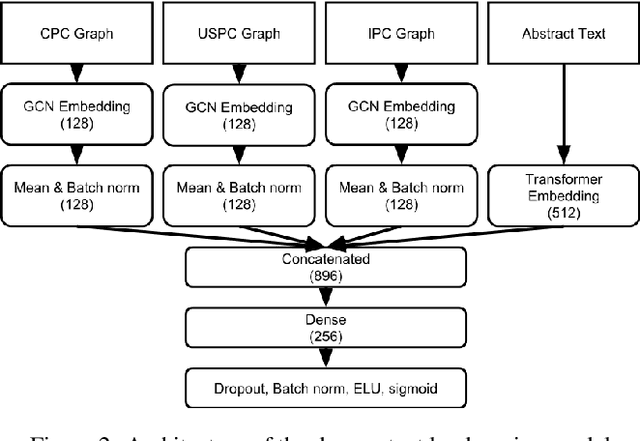
Patent landscaping is a method that is employed for searching related patents during the process of a research and development (R&D) project. To avoid the risk of patent infringement and to follow the current trends of technology development, patent landscaping is a crucial task that needs to be conducted during the early stages of an R&D project. Generally, the process of patent landscaping requires several advanced resources and can be tedious. Furthermore, the patent landscaping process has to be repeated throughout the duration of an R&D project. Owing to such reasons, the demand for automated patent landscaping is gradually increasing. However, the shortage of well-defined benchmarking datasets and comparable models makes it difficult to find related research studies. In this paper, an automated patent landscaping model based on deep learning is proposed. The proposed model comprises a modified transformer structure for analyzing textual data present in patent documents and a graph convolutional network for analyzing patent metadata. Twelve patent landscaping benchmarking datasets, which were processed by the Korean patent attorney, are proposed for determining the resources required for comparing related research studies. Obtained results indicate that the proposed model with the proposed datasets can attain state-of-the-art performance , and mean classification accuracy of 98% can be achieved.