 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGalibr: Targetless LiDAR-Camera Extrinsic Calibration Method via Ground Plane Initialization
Paper and Code
Jun 14, 2024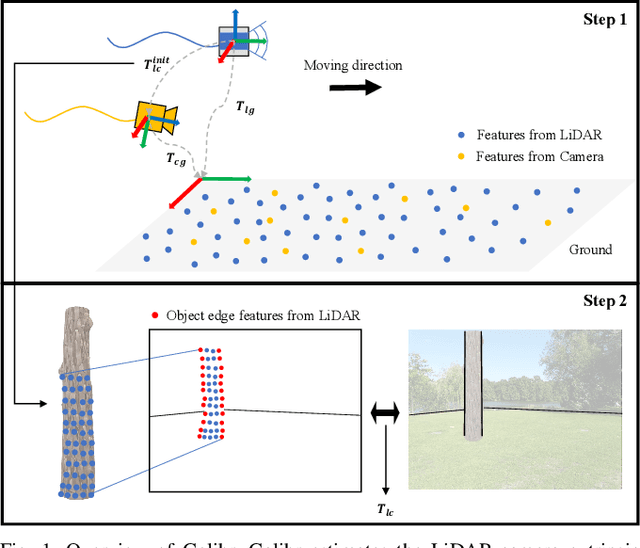
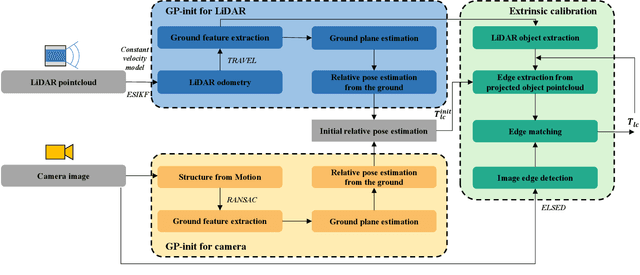
With the rapid development of autonomous driving and SLAM technology, the performance of autonomous systems using multimodal sensors highly relies on accurate extrinsic calibration. Addressing the need for a convenient, maintenance-friendly calibration process in any natural environment, this paper introduces Galibr, a fully automatic targetless LiDAR-camera extrinsic calibration tool designed for ground vehicle platforms in any natural setting. The method utilizes the ground planes and edge information from both LiDAR and camera inputs, streamlining the calibration process. It encompasses two main steps: an initial pose estimation algorithm based on ground planes (GP-init), and a refinement phase through edge extraction and matching. Our approach significantly enhances calibration performance, primarily attributed to our novel initial pose estimation method, as demonstrated in unstructured natural environments, including on the KITTI dataset and the KAIST quadruped dataset.