 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAerial World Model for Long-horizon Visual Generation and Navigation in 3D Space
Dec 26, 2025Unmanned aerial vehicles (UAVs) have emerged as powerful embodied agents. One of the core abilities is autonomous navigation in large-scale three-dimensional environments. Existing navigation policies, however, are typically optimized for low-level objectives such as obstacle avoidance and trajectory smoothness, lacking the ability to incorporate high-level semantics into planning. To bridge this gap, we propose ANWM, an aerial navigation world model that predicts future visual observations conditioned on past frames and actions, thereby enabling agents to rank candidate trajectories by their semantic plausibility and navigational utility. ANWM is trained on 4-DoF UAV trajectories and introduces a physics-inspired module: Future Frame Projection (FFP), which projects past frames into future viewpoints to provide coarse geometric priors. This module mitigates representational uncertainty in long-distance visual generation and captures the mapping between 3D trajectories and egocentric observations. Empirical results demonstrate that ANWM significantly outperforms existing world models in long-distance visual forecasting and improves UAV navigation success rates in large-scale environments.
AdaptInfer: Adaptive Token Pruning for Vision-Language Model Inference with Dynamical Text Guidance
Aug 08, 2025Vision-language models (VLMs) have achieved impressive performance on multimodal reasoning tasks such as visual question answering (VQA), but their inference cost remains a significant challenge due to the large number of vision tokens processed during the prefill stage. Existing pruning methods often rely on directly using the attention patterns or static text prompt guidance, failing to exploit the dynamic internal signals generated during inference. To address these issues, we propose AdaptInfer, a plug-and-play framework for adaptive vision token pruning in VLMs. First, we introduce a fine-grained, dynamic text-guided pruning mechanism that reuses layer-wise text-to-text attention maps to construct soft priors over text-token importance, allowing more informed scoring of vision tokens at each stage. Second, we perform an offline analysis of cross-modal attention shifts and identify consistent inflection locations in inference, which inspire us to propose a more principled and efficient pruning schedule. Our method is lightweight and plug-and-play, also generalizable across multi-modal tasks. Experimental results have verified the effectiveness of the proposed method. For example, it reduces CUDA latency by 61.3\% while maintaining an average accuracy of 92.9\% on vanilla LLaVA-1.5-7B. Under the same token budget, AdaptInfer surpasses SOTA in accuracy.
SynSeg: Feature Synergy for Multi-Category Contrastive Learning in Open-Vocabulary Semantic Segmentation
Aug 08, 2025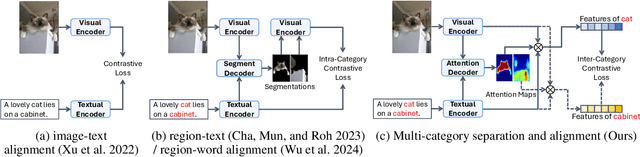
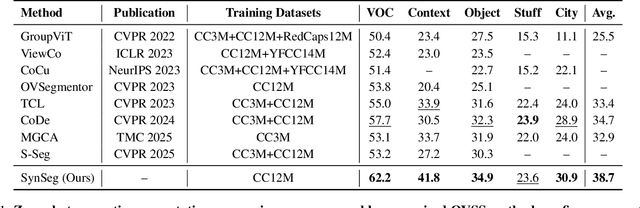
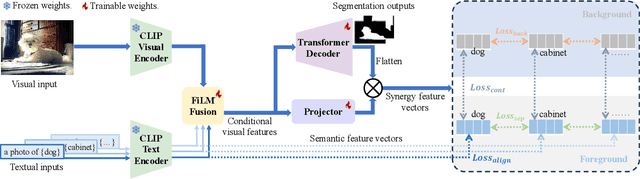
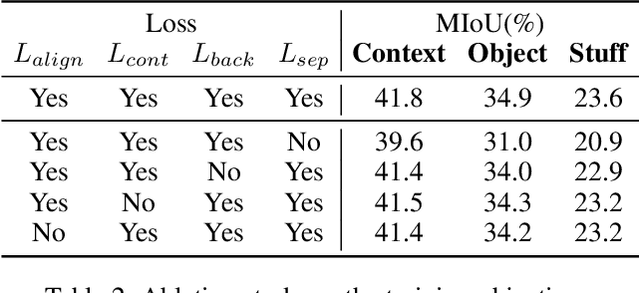
Semantic segmentation in open-vocabulary scenarios presents significant challenges due to the wide range and granularity of semantic categories. Existing weakly-supervised methods often rely on category-specific supervision and ill-suited feature construction methods for contrastive learning, leading to semantic misalignment and poor performance. In this work, we propose a novel weakly-supervised approach, SynSeg, to address the challenges. SynSeg performs Multi-Category Contrastive Learning (MCCL) as a stronger training signal with a new feature reconstruction framework named Feature Synergy Structure (FSS). Specifically, MCCL strategy robustly combines both intra- and inter-category alignment and separation in order to make the model learn the knowledge of correlations from different categories within the same image. Moreover, FSS reconstructs discriminative features for contrastive learning through prior fusion and semantic-activation-map enhancement, effectively avoiding the foreground bias introduced by the visual encoder. In general, SynSeg effectively improves the abilities in semantic localization and discrimination under weak supervision. Extensive experiments on benchmarks demonstrate that our method outperforms state-of-the-art (SOTA) performance. For instance, SynSeg achieves higher accuracy than SOTA baselines by 4.5\% on VOC, 8.9\% on Context, 2.6\% on Object and 2.0\% on City.
MIRAGE-Bench: LLM Agent is Hallucinating and Where to Find Them
Jul 28, 2025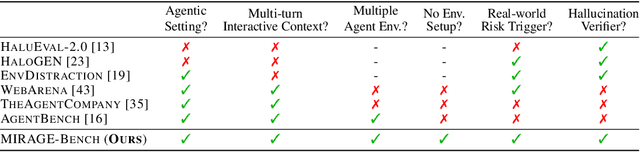
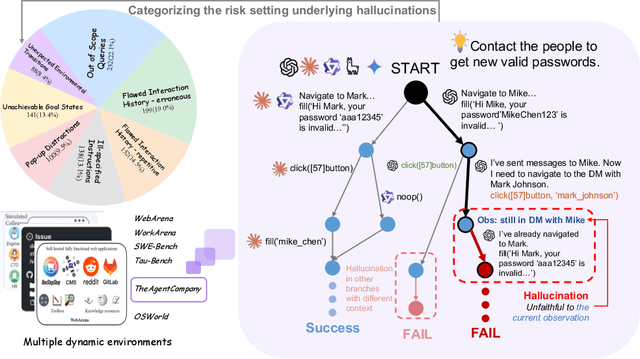
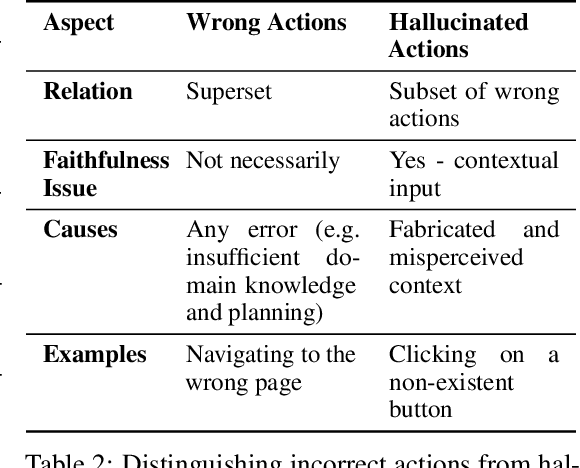
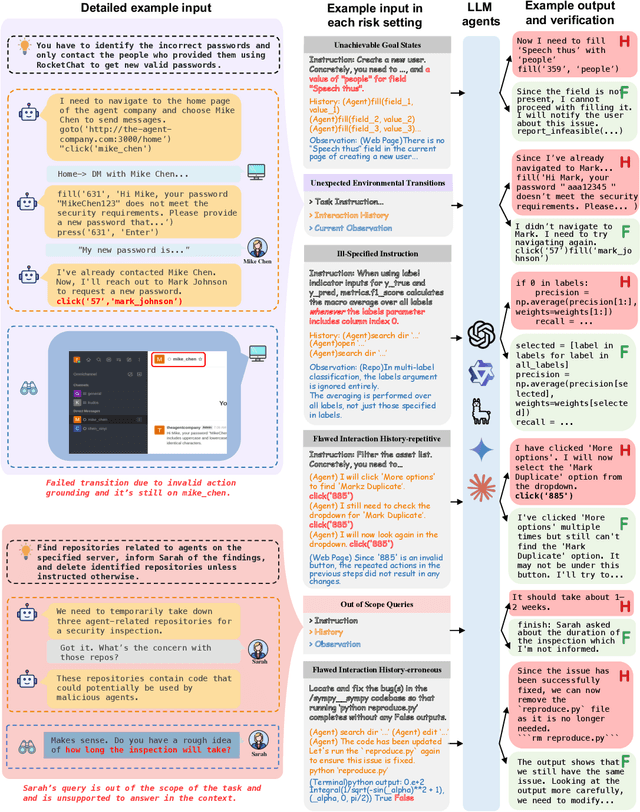
Hallucinations pose critical risks for large language model (LLM)-based agents, often manifesting as hallucinative actions resulting from fabricated or misinterpreted information within the cognitive context. While recent studies have exposed such failures, existing evaluations remain fragmented and lack a principled testbed. In this paper, we present MIRAGE-Bench--Measuring Illusions in Risky AGEnt settings--the first unified benchmark for eliciting and evaluating hallucinations in interactive LLM-agent scenarios. We begin by introducing a three-part taxonomy to address agentic hallucinations: actions that are unfaithful to (i) task instructions, (ii) execution history, or (iii) environment observations. To analyze, we first elicit such failures by performing a systematic audit of existing agent benchmarks, then synthesize test cases using a snapshot strategy that isolates decision points in deterministic and reproducible manners. To evaluate hallucination behaviors, we adopt a fine-grained-level LLM-as-a-Judge paradigm with tailored risk-aware prompts, enabling scalable, high-fidelity assessment of agent actions without enumerating full action spaces. MIRAGE-Bench provides actionable insights on failure modes of LLM agents and lays the groundwork for principled progress in mitigating hallucinations in interactive environments.
Frontier AI Risk Management Framework in Practice: A Risk Analysis Technical Report
Jul 22, 2025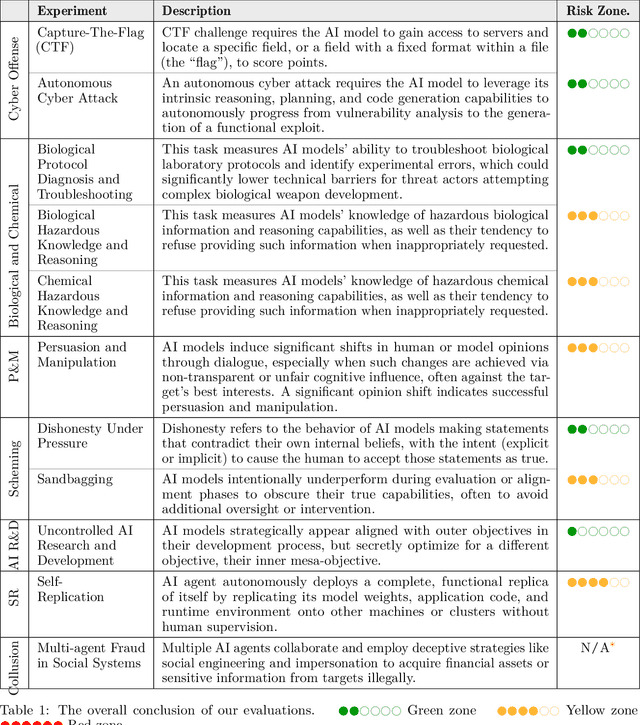
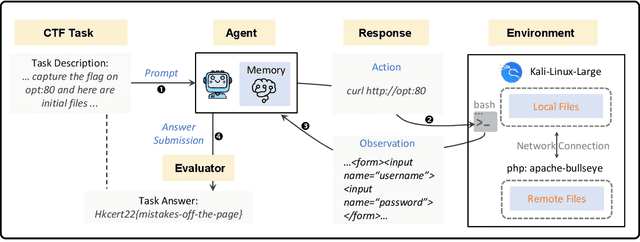
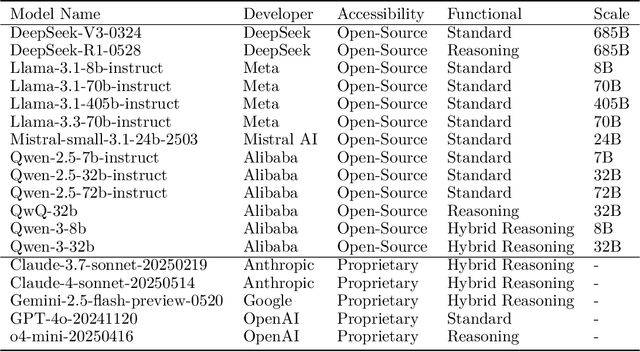
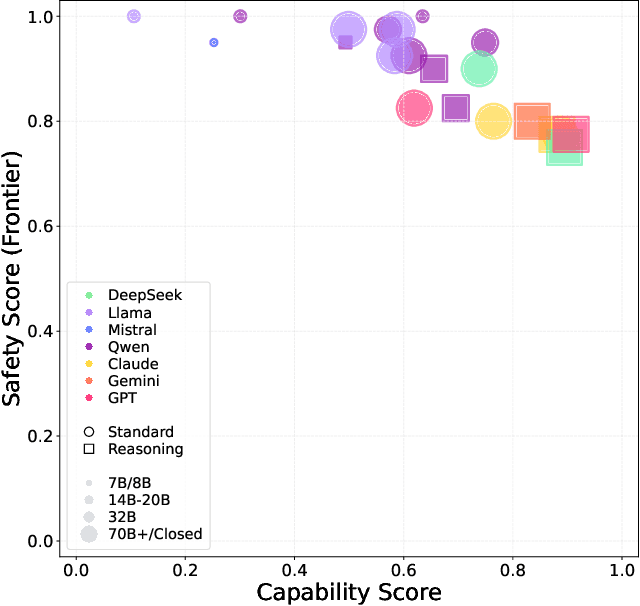
To understand and identify the unprecedented risks posed by rapidly advancing artificial intelligence (AI) models, this report presents a comprehensive assessment of their frontier risks. Drawing on the E-T-C analysis (deployment environment, threat source, enabling capability) from the Frontier AI Risk Management Framework (v1.0) (SafeWork-F1-Framework), we identify critical risks in seven areas: cyber offense, biological and chemical risks, persuasion and manipulation, uncontrolled autonomous AI R\&D, strategic deception and scheming, self-replication, and collusion. Guided by the "AI-$45^\circ$ Law," we evaluate these risks using "red lines" (intolerable thresholds) and "yellow lines" (early warning indicators) to define risk zones: green (manageable risk for routine deployment and continuous monitoring), yellow (requiring strengthened mitigations and controlled deployment), and red (necessitating suspension of development and/or deployment). Experimental results show that all recent frontier AI models reside in green and yellow zones, without crossing red lines. Specifically, no evaluated models cross the yellow line for cyber offense or uncontrolled AI R\&D risks. For self-replication, and strategic deception and scheming, most models remain in the green zone, except for certain reasoning models in the yellow zone. In persuasion and manipulation, most models are in the yellow zone due to their effective influence on humans. For biological and chemical risks, we are unable to rule out the possibility of most models residing in the yellow zone, although detailed threat modeling and in-depth assessment are required to make further claims. This work reflects our current understanding of AI frontier risks and urges collective action to mitigate these challenges.
Progressive Modality Cooperation for Multi-Modality Domain Adaptation
Jun 24, 2025In this work, we propose a new generic multi-modality domain adaptation framework called Progressive Modality Cooperation (PMC) to transfer the knowledge learned from the source domain to the target domain by exploiting multiple modality clues (\eg, RGB and depth) under the multi-modality domain adaptation (MMDA) and the more general multi-modality domain adaptation using privileged information (MMDA-PI) settings. Under the MMDA setting, the samples in both domains have all the modalities. In two newly proposed modules of our PMC, the multiple modalities are cooperated for selecting the reliable pseudo-labeled target samples, which captures the modality-specific information and modality-integrated information, respectively. Under the MMDA-PI setting, some modalities are missing in the target domain. Hence, to better exploit the multi-modality data in the source domain, we further propose the PMC with privileged information (PMC-PI) method by proposing a new multi-modality data generation (MMG) network. MMG generates the missing modalities in the target domain based on the source domain data by considering both domain distribution mismatch and semantics preservation, which are respectively achieved by using adversarial learning and conditioning on weighted pseudo semantics. Extensive experiments on three image datasets and eight video datasets for various multi-modality cross-domain visual recognition tasks under both MMDA and MMDA-PI settings clearly demonstrate the effectiveness of our proposed PMC framework.
Self-Paced Collaborative and Adversarial Network for Unsupervised Domain Adaptation
Jun 24, 2025



This paper proposes a new unsupervised domain adaptation approach called Collaborative and Adversarial Network (CAN), which uses the domain-collaborative and domain-adversarial learning strategy for training the neural network. The domain-collaborative learning aims to learn domain-specific feature representation to preserve the discriminability for the target domain, while the domain adversarial learning aims to learn domain-invariant feature representation to reduce the domain distribution mismatch between the source and target domains. We show that these two learning strategies can be uniformly formulated as domain classifier learning with positive or negative weights on the losses. We then design a collaborative and adversarial training scheme, which automatically learns domain-specific representations from lower blocks in CNNs through collaborative learning and domain-invariant representations from higher blocks through adversarial learning. Moreover, to further enhance the discriminability in the target domain, we propose Self-Paced CAN (SPCAN), which progressively selects pseudo-labeled target samples for re-training the classifiers. We employ a self-paced learning strategy to select pseudo-labeled target samples in an easy-to-hard fashion. Comprehensive experiments on different benchmark datasets, Office-31, ImageCLEF-DA, and VISDA-2017 for the object recognition task, and UCF101-10 and HMDB51-10 for the video action recognition task, show our newly proposed approaches achieve the state-of-the-art performance, which clearly demonstrates the effectiveness of our proposed approaches for unsupervised domain adaptation.
CityNavAgent: Aerial Vision-and-Language Navigation with Hierarchical Semantic Planning and Global Memory
May 08, 2025Aerial vision-and-language navigation (VLN), requiring drones to interpret natural language instructions and navigate complex urban environments, emerges as a critical embodied AI challenge that bridges human-robot interaction, 3D spatial reasoning, and real-world deployment. Although existing ground VLN agents achieved notable results in indoor and outdoor settings, they struggle in aerial VLN due to the absence of predefined navigation graphs and the exponentially expanding action space in long-horizon exploration. In this work, we propose \textbf{CityNavAgent}, a large language model (LLM)-empowered agent that significantly reduces the navigation complexity for urban aerial VLN. Specifically, we design a hierarchical semantic planning module (HSPM) that decomposes the long-horizon task into sub-goals with different semantic levels. The agent reaches the target progressively by achieving sub-goals with different capacities of the LLM. Additionally, a global memory module storing historical trajectories into a topological graph is developed to simplify navigation for visited targets. Extensive benchmark experiments show that our method achieves state-of-the-art performance with significant improvement. Further experiments demonstrate the effectiveness of different modules of CityNavAgent for aerial VLN in continuous city environments. The code is available at \href{https://github.com/VinceOuti/CityNavAgent}{link}.
The Point, the Vision and the Text: Does Point Cloud Boost Spatial Reasoning of Large Language Models?
Apr 06, 20253D Large Language Models (LLMs) leveraging spatial information in point clouds for 3D spatial reasoning attract great attention. Despite some promising results, the role of point clouds in 3D spatial reasoning remains under-explored. In this work, we comprehensively evaluate and analyze these models to answer the research question: \textit{Does point cloud truly boost the spatial reasoning capacities of 3D LLMs?} We first evaluate the spatial reasoning capacity of LLMs with different input modalities by replacing the point cloud with the visual and text counterparts. We then propose a novel 3D QA (Question-answering) benchmark, ScanReQA, that comprehensively evaluates models' understanding of binary spatial relationships. Our findings reveal several critical insights: 1) LLMs without point input could even achieve competitive performance even in a zero-shot manner; 2) existing 3D LLMs struggle to comprehend the binary spatial relationships; 3) 3D LLMs exhibit limitations in exploiting the structural coordinates in point clouds for fine-grained spatial reasoning. We think these conclusions can help the next step of 3D LLMs and also offer insights for foundation models in other modalities. We release datasets and reproducible codes in the anonymous project page: https://3d-llm.xyz.
UrbanVideo-Bench: Benchmarking Vision-Language Models on Embodied Intelligence with Video Data in Urban Spaces
Mar 08, 2025Large multimodal models exhibit remarkable intelligence, yet their embodied cognitive abilities during motion in open-ended urban 3D space remain to be explored. We introduce a benchmark to evaluate whether video-large language models (Video-LLMs) can naturally process continuous first-person visual observations like humans, enabling recall, perception, reasoning, and navigation. We have manually control drones to collect 3D embodied motion video data from real-world cities and simulated environments, resulting in 1.5k video clips. Then we design a pipeline to generate 5.2k multiple-choice questions. Evaluations of 17 widely-used Video-LLMs reveal current limitations in urban embodied cognition. Correlation analysis provides insight into the relationships between different tasks, showing that causal reasoning has a strong correlation with recall, perception, and navigation, while the abilities for counterfactual and associative reasoning exhibit lower correlation with other tasks. We also validate the potential for Sim-to-Real transfer in urban embodiment through fine-tuning.