 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAerial World Model for Long-horizon Visual Generation and Navigation in 3D Space
Dec 26, 2025Unmanned aerial vehicles (UAVs) have emerged as powerful embodied agents. One of the core abilities is autonomous navigation in large-scale three-dimensional environments. Existing navigation policies, however, are typically optimized for low-level objectives such as obstacle avoidance and trajectory smoothness, lacking the ability to incorporate high-level semantics into planning. To bridge this gap, we propose ANWM, an aerial navigation world model that predicts future visual observations conditioned on past frames and actions, thereby enabling agents to rank candidate trajectories by their semantic plausibility and navigational utility. ANWM is trained on 4-DoF UAV trajectories and introduces a physics-inspired module: Future Frame Projection (FFP), which projects past frames into future viewpoints to provide coarse geometric priors. This module mitigates representational uncertainty in long-distance visual generation and captures the mapping between 3D trajectories and egocentric observations. Empirical results demonstrate that ANWM significantly outperforms existing world models in long-distance visual forecasting and improves UAV navigation success rates in large-scale environments.
QUIDS: Quality-informed Incentive-driven Multi-agent Dispatching System for Mobile Crowdsensing
Dec 18, 2025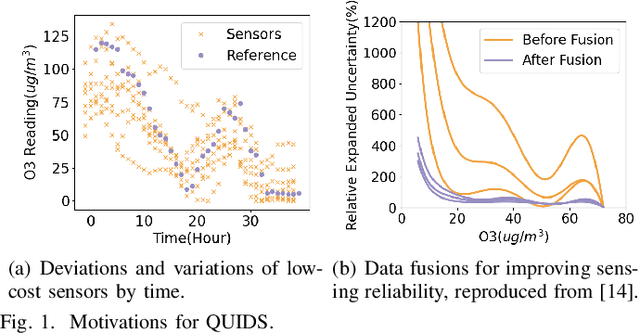
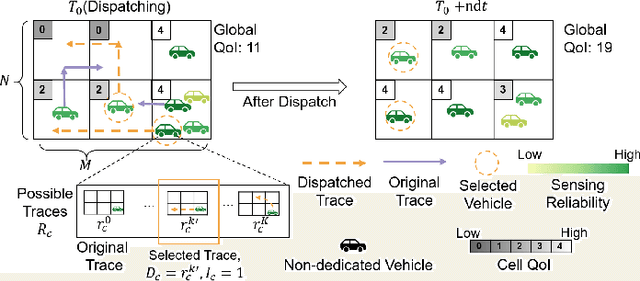
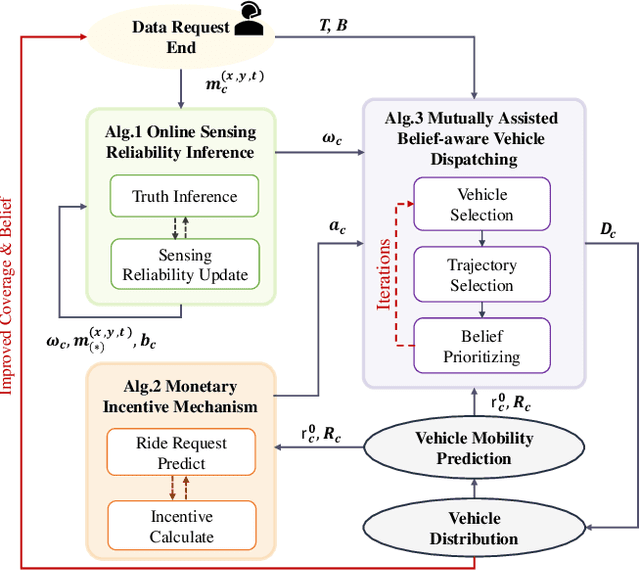
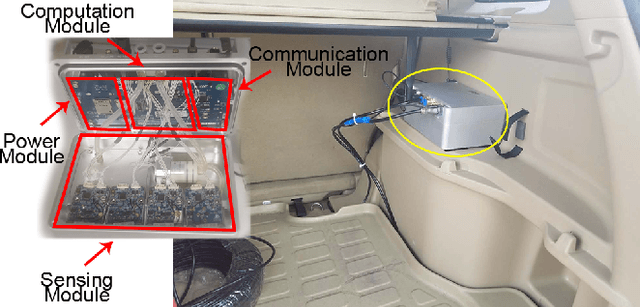
This paper addresses the challenge of achieving optimal Quality of Information (QoI) in non-dedicated vehicular mobile crowdsensing (NVMCS) systems. The key obstacles are the interrelated issues of sensing coverage, sensing reliability, and the dynamic participation of vehicles. To tackle these, we propose QUIDS, a QUality-informed Incentive-driven multi-agent Dispatching System, which ensures high sensing coverage and reliability under budget constraints. QUIDS introduces a novel metric, Aggregated Sensing Quality (ASQ), to quantitatively capture QoI by integrating both coverage and reliability. We also develop a Mutually Assisted Belief-aware Vehicle Dispatching algorithm that estimates sensing reliability and allocates incentives under uncertainty, further improving ASQ. Evaluation using real-world data from a metropolitan NVMCS deployment shows QUIDS improves ASQ by 38% over non-dispatching scenarios and by 10% over state-of-the-art methods. It also reduces reconstruction map errors by 39-74% across algorithms. By jointly optimizing coverage and reliability via a quality-informed incentive mechanism, QUIDS enables low-cost, high-quality urban monitoring without dedicated infrastructure, applicable to smart-city scenarios like traffic and environmental sensing.
Context-Aware Sentiment Forecasting via LLM-based Multi-Perspective Role-Playing Agents
May 30, 2025User sentiment on social media reveals the underlying social trends, crises, and needs. Researchers have analyzed users' past messages to trace the evolution of sentiments and reconstruct sentiment dynamics. However, predicting the imminent sentiment of an ongoing event is rarely studied. In this paper, we address the problem of \textbf{sentiment forecasting} on social media to predict the user's future sentiment in response to the development of the event. We extract sentiment-related features to enhance the modeling skill and propose a multi-perspective role-playing framework to simulate the process of human response. Our preliminary results show significant improvement in sentiment forecasting on both microscopic and macroscopic levels.
KEVER^2: Knowledge-Enhanced Visual Emotion Reasoning and Retrieval
May 30, 2025Understanding what emotions images evoke in their viewers is a foundational goal in human-centric visual computing. While recent advances in vision-language models (VLMs) have shown promise for visual emotion analysis (VEA), several key challenges remain unresolved. Emotional cues in images are often abstract, overlapping, and entangled, making them difficult to model and interpret. Moreover, VLMs struggle to align these complex visual patterns with emotional semantics due to limited supervision and sparse emotional grounding. Finally, existing approaches lack structured affective knowledge to resolve ambiguity and ensure consistent emotional reasoning across diverse visual domains. To address these limitations, we propose \textbf{K-EVER\textsuperscript{2}}, a knowledge-enhanced framework for emotion reasoning and retrieval. Our approach introduces a semantically structured formulation of visual emotion cues and integrates external affective knowledge through multimodal alignment. Without relying on handcrafted labels or direct emotion supervision, K-EVER\textsuperscript{2} achieves robust and interpretable emotion predictions across heterogeneous image types. We validate our framework on three representative benchmarks, Emotion6, EmoSet, and M-Disaster, covering social media imagery, human-centric scenes, and disaster contexts. K-EVER\textsuperscript{2} consistently outperforms strong CNN and VLM baselines, achieving up to a \textbf{19\% accuracy gain} for specific emotions and a \textbf{12.3\% average accuracy gain} across all emotion categories. Our results demonstrate a scalable and generalizable solution for advancing emotional understanding of visual content.
Embodied-R: Collaborative Framework for Activating Embodied Spatial Reasoning in Foundation Models via Reinforcement Learning
Apr 17, 2025Humans can perceive and reason about spatial relationships from sequential visual observations, such as egocentric video streams. However, how pretrained models acquire such abilities, especially high-level reasoning, remains unclear. This paper introduces Embodied-R, a collaborative framework combining large-scale Vision-Language Models (VLMs) for perception and small-scale Language Models (LMs) for reasoning. Using Reinforcement Learning (RL) with a novel reward system considering think-answer logical consistency, the model achieves slow-thinking capabilities with limited computational resources. After training on only 5k embodied video samples, Embodied-R with a 3B LM matches state-of-the-art multimodal reasoning models (OpenAI-o1, Gemini-2.5-pro) on both in-distribution and out-of-distribution embodied spatial reasoning tasks. Embodied-R also exhibits emergent thinking patterns such as systematic analysis and contextual integration. We further explore research questions including response length, training on VLM, strategies for reward design, and differences in model generalization after SFT (Supervised Fine-Tuning) and RL training.
EmbodiedCity: A Benchmark Platform for Embodied Agent in Real-world City Environment
Oct 12, 2024Embodied artificial intelligence emphasizes the role of an agent's body in generating human-like behaviors. The recent efforts on EmbodiedAI pay a lot of attention to building up machine learning models to possess perceiving, planning, and acting abilities, thereby enabling real-time interaction with the world. However, most works focus on bounded indoor environments, such as navigation in a room or manipulating a device, with limited exploration of embodying the agents in open-world scenarios. That is, embodied intelligence in the open and outdoor environment is less explored, for which one potential reason is the lack of high-quality simulators, benchmarks, and datasets. To address it, in this paper, we construct a benchmark platform for embodied intelligence evaluation in real-world city environments. Specifically, we first construct a highly realistic 3D simulation environment based on the real buildings, roads, and other elements in a real city. In this environment, we combine historically collected data and simulation algorithms to conduct simulations of pedestrian and vehicle flows with high fidelity. Further, we designed a set of evaluation tasks covering different EmbodiedAI abilities. Moreover, we provide a complete set of input and output interfaces for access, enabling embodied agents to easily take task requirements and current environmental observations as input and then make decisions and obtain performance evaluations. On the one hand, it expands the capability of existing embodied intelligence to higher levels. On the other hand, it has a higher practical value in the real world and can support more potential applications for artificial general intelligence. Based on this platform, we evaluate some popular large language models for embodied intelligence capabilities of different dimensions and difficulties.