 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAirHunt: Bridging VLM Semantics and Continuous Planning for Efficient Aerial Object Navigation
Jan 19, 2026Recent advances in large Vision-Language Models (VLMs) have provided rich semantic understanding that empowers drones to search for open-set objects via natural language instructions. However, prior systems struggle to integrate VLMs into practical aerial systems due to orders-of-magnitude frequency mismatch between VLM inference and real-time planning, as well as VLMs' limited 3D scene understanding. They also lack a unified mechanism to balance semantic guidance with motion efficiency in large-scale environments. To address these challenges, we present AirHunt, an aerial object navigation system that efficiently locates open-set objects with zero-shot generalization in outdoor environments by seamlessly fusing VLM semantic reasoning with continuous path planning. AirHunt features a dual-pathway asynchronous architecture that establishes a synergistic interface between VLM reasoning and path planning, enabling continuous flight with adaptive semantic guidance that evolves through motion. Moreover, we propose an active dual-task reasoning module that exploits geometric and semantic redundancy to enable selective VLM querying, and a semantic-geometric coherent planning module that dynamically reconciles semantic priorities and motion efficiency in a unified framework, enabling seamless adaptation to environmental heterogeneity. We evaluate AirHunt across diverse object navigation tasks and environments, demonstrating a higher success rate with lower navigation error and reduced flight time compared to state-of-the-art methods. Real-world experiments further validate AirHunt's practical capability in complex and challenging environments. Code and dataset will be made publicly available before publication.
QUIDS: Quality-informed Incentive-driven Multi-agent Dispatching System for Mobile Crowdsensing
Dec 18, 2025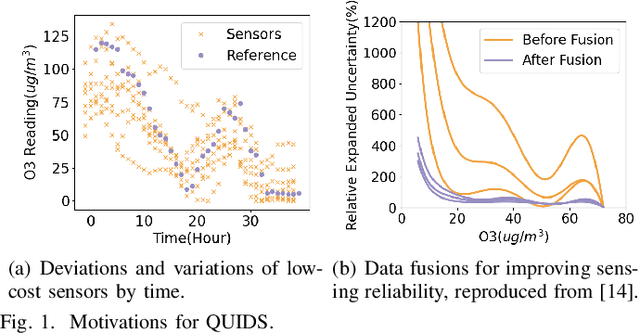
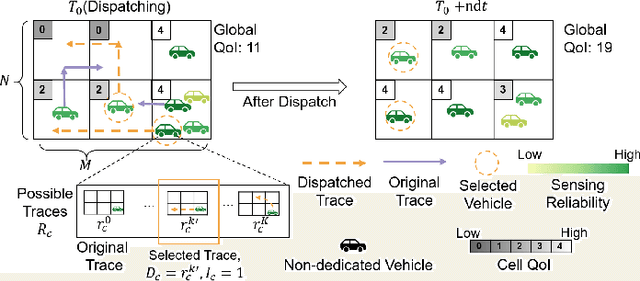
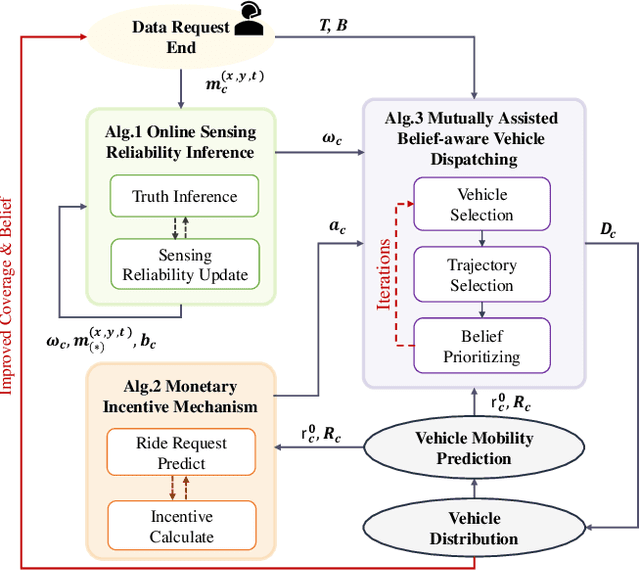
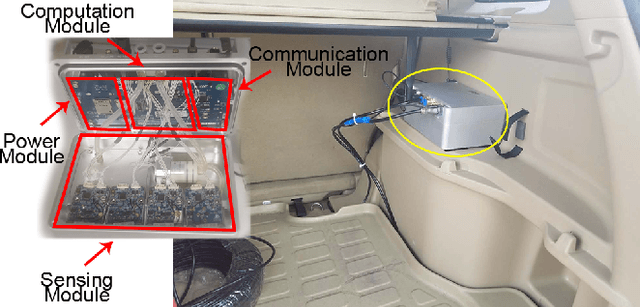
This paper addresses the challenge of achieving optimal Quality of Information (QoI) in non-dedicated vehicular mobile crowdsensing (NVMCS) systems. The key obstacles are the interrelated issues of sensing coverage, sensing reliability, and the dynamic participation of vehicles. To tackle these, we propose QUIDS, a QUality-informed Incentive-driven multi-agent Dispatching System, which ensures high sensing coverage and reliability under budget constraints. QUIDS introduces a novel metric, Aggregated Sensing Quality (ASQ), to quantitatively capture QoI by integrating both coverage and reliability. We also develop a Mutually Assisted Belief-aware Vehicle Dispatching algorithm that estimates sensing reliability and allocates incentives under uncertainty, further improving ASQ. Evaluation using real-world data from a metropolitan NVMCS deployment shows QUIDS improves ASQ by 38% over non-dispatching scenarios and by 10% over state-of-the-art methods. It also reduces reconstruction map errors by 39-74% across algorithms. By jointly optimizing coverage and reliability via a quality-informed incentive mechanism, QUIDS enables low-cost, high-quality urban monitoring without dedicated infrastructure, applicable to smart-city scenarios like traffic and environmental sensing.
Count Every Rotation and Every Rotation Counts: Exploring Drone Dynamics via Propeller Sensing
Nov 17, 2025As drone-based applications proliferate, paramount contactless sensing of airborne drones from the ground becomes indispensable. This work demonstrates concentrating on propeller rotational speed will substantially improve drone sensing performance and proposes an event-camera-based solution, \sysname. \sysname features two components: \textit{Count Every Rotation} achieves accurate, real-time propeller speed estimation by mitigating ultra-high sensitivity of event cameras to environmental noise. \textit{Every Rotation Counts} leverages these speeds to infer both internal and external drone dynamics. Extensive evaluations in real-world drone delivery scenarios show that \sysname achieves a sensing latency of 3$ms$ and a rotational speed estimation error of merely 0.23\%. Additionally, \sysname infers drone flight commands with 96.5\% precision and improves drone tracking accuracy by over 22\% when combined with other sensing modalities. \textit{ Demo: {\color{blue}https://eventpro25.github.io/EventPro/.} }
Enabling High-Frequency Cross-Modality Visual Positioning Service for Accurate Drone Landing
Oct 01, 2025After years of growth, drone-based delivery is transforming logistics. At its core, real-time 6-DoF drone pose tracking enables precise flight control and accurate drone landing. With the widespread availability of urban 3D maps, the Visual Positioning Service (VPS), a mobile pose estimation system, has been adapted to enhance drone pose tracking during the landing phase, as conventional systems like GPS are unreliable in urban environments due to signal attenuation and multi-path propagation. However, deploying the current VPS on drones faces limitations in both estimation accuracy and efficiency. In this work, we redesign drone-oriented VPS with the event camera and introduce EV-Pose to enable accurate, high-frequency 6-DoF pose tracking for accurate drone landing. EV-Pose introduces a spatio-temporal feature-instructed pose estimation module that extracts a temporal distance field to enable 3D point map matching for pose estimation; and a motion-aware hierarchical fusion and optimization scheme to enhance the above estimation in accuracy and efficiency, by utilizing drone motion in the \textit{early stage} of event filtering and the \textit{later stage} of pose optimization. Evaluation shows that EV-Pose achieves a rotation accuracy of 1.34$\degree$ and a translation accuracy of 6.9$mm$ with a tracking latency of 10.08$ms$, outperforming baselines by $>$50\%, \tmcrevise{thus enabling accurate drone landings.} Demo: https://ev-pose.github.io/
Ultra-High-Frequency Harmony: mmWave Radar and Event Camera Orchestrate Accurate Drone Landing
Feb 20, 2025For precise, efficient, and safe drone landings, ground platforms should real-time, accurately locate descending drones and guide them to designated spots. While mmWave sensing combined with cameras improves localization accuracy, the lower sampling frequency of traditional frame cameras compared to mmWave radar creates bottlenecks in system throughput. In this work, we replace the traditional frame camera with event camera, a novel sensor that harmonizes in sampling frequency with mmWave radar within the ground platform setup, and introduce mmE-Loc, a high-precision, low-latency ground localization system designed for drone landings. To fully leverage the \textit{temporal consistency} and \textit{spatial complementarity} between these modalities, we propose two innovative modules, \textit{consistency-instructed collaborative tracking} and \textit{graph-informed adaptive joint optimization}, for accurate drone measurement extraction and efficient sensor fusion. Extensive real-world experiments in landing scenarios from a leading drone delivery company demonstrate that mmE-Loc outperforms state-of-the-art methods in both localization accuracy and latency.
SniffySquad: Patchiness-Aware Gas Source Localization with Multi-Robot Collaboration
Nov 09, 2024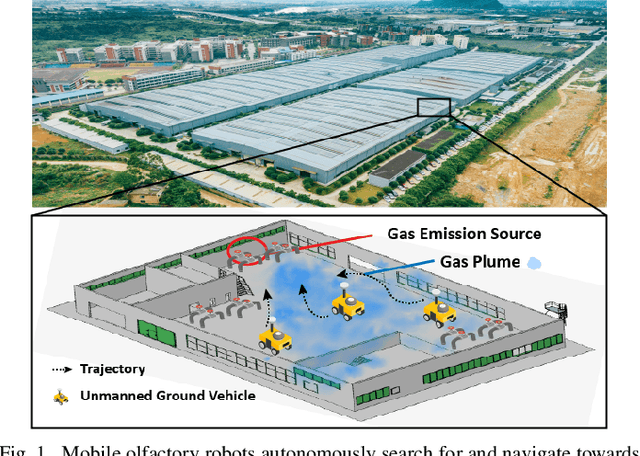
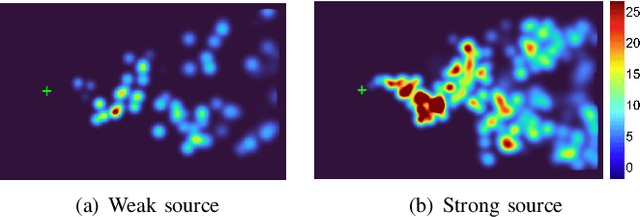
Gas source localization is pivotal for the rapid mitigation of gas leakage disasters, where mobile robots emerge as a promising solution. However, existing methods predominantly schedule robots' movements based on reactive stimuli or simplified gas plume models. These approaches typically excel in idealized, simulated environments but fall short in real-world gas environments characterized by their patchy distribution. In this work, we introduce SniffySquad, a multi-robot olfaction-based system designed to address the inherent patchiness in gas source localization. SniffySquad incorporates a patchiness-aware active sensing approach that enhances the quality of data collection and estimation. Moreover, it features an innovative collaborative role adaptation strategy to boost the efficiency of source-seeking endeavors. Extensive evaluations demonstrate that our system achieves an increase in the success rate by $20\%+$ and an improvement in path efficiency by $30\%+$, outperforming state-of-the-art gas source localization solutions.