 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysical Layer Security for FAS-Aided Short-Packet Systems: A Variable Block-Correlation Approach
Mar 18, 2026This paper presents a comprehensive physical layer security (PLS) framework for fluid antenna system (FAS)-aided short-packet communications under the variable block-correlation model (VBCM). We consider a downlink wiretap scenario in which a base station transmits confidential short packets to a legitimate receiver user (RU) in the presence of an eavesdropper user (EU), where both the RU and EU are equipped with fluid antennas. Unlike existing FAS security analyses that rely on constant block-correlation models or infinite-blocklength assumptions, we incorporate the VBCM to accurately capture the non-uniform spatial correlation structure inherent in practical FAS deployments. By employing a piecewise linear approximation of the decoding error probability and Gauss-Chebyshev quadrature, we derive closed-form and asymptotic expressions for the average achievable secrecy throughput (AAST). We further prove that the AAST is monotonically non-decreasing in the number of RU ports, which reduces the three-dimensional joint optimization of transmit power, blocklength, and port number to a two-dimensional grid search (GS). Numerical results demonstrate that the FAS-aided system achieves up to an order-of-magnitude secrecy throughput improvement over conventional fixed-position antenna systems, and reveal that blocklength selection is the most critical design parameter in the joint optimization.
Adaptive Phase Shift Information Compression for IRS Systems: A Prompt Conditioned Variable Rate Framework
Nov 05, 2025Intelligent reflecting surfaces (IRSs) have become a vital technology for improving the spectrum and energy efficiency of forthcoming wireless networks. Nevertheless, practical implementation is obstructed by the excessive overhead associated with the frequent transmission of phase shift information (PSI) over bandwidth-constrained control lines. Current deep learning-based compression methods mitigate this problem but are constrained by elevated decoder complexity, inadequate flexibility to dynamic channels, and static compression ratios. This research presents a prompt-conditioned PSI compression system that integrates prompt learning inspired by large models into the PSI compression process to address these difficulties. A hybrid prompt technique that integrates soft prompt concatenation with feature-wise linear modulation (FiLM) facilitates adaptive encoding across diverse signal-to-noise ratios (SNRs), fading kinds, and compression ratios. Furthermore, a variable rate technique incorporates the compression ratio into the prompt embeddings through latent masking, enabling a singular model to adeptly balance reconstruction accuracy. Additionally, a lightweight depthwise convolutional gating (DWCG) decoder facilitates precise feature reconstruction with minimal complexity. Comprehensive simulations indicate that the proposed framework significantly reduces NMSE compared to traditional autoencoder baselines, while ensuring robustness across various channel circumstances and accommodating variable compression ratios within a single model. These findings underscore the framework's promise as a scalable and efficient solution for real-time IRS control in next-generation wireless networks.
Joint Probing and Scheduling for Cache-Aided Hybrid Satellite-Terrestrial Networks
Oct 06, 2025Caching is crucial in hybrid satellite-terrestrial networks to reduce latency, optimize throughput, and improve data availability by storing frequently accessed content closer to users, especially in bandwidth-limited satellite systems, requiring strategic Medium Access Control (MAC) layer. This paper addresses throughput optimization in satellite-terrestrial integrated networks through opportunistic cooperative caching. We propose a joint probing and scheduling strategy to enhance content retrieval efficiency. The strategy leverages the LEO satellite to probe satellite-to-ground links and cache states of multiple cooperative terrestrial stations, enabling dynamic user scheduling for content delivery. Using an optimal stopping theoretic approach with two levels of incomplete information, we make real-time decisions on satellite-terrestrial hybrid links and caching probing. Our threshold-based strategy optimizes probing and scheduling, significantly improving average system throughput by exploiting cooperative caching, satellite-terrestrial link transmission, and time diversity from dynamic user requests. Simulation results validate the effectiveness and practicality of the proposed strategies.
A Deep Learning based Signal Dimension Estimator with Single Snapshot Signal in Phased Array Radar Application
Aug 14, 2025Signal dimension, defined here as the number of copies with different delays or angular shifts, is a prerequisite for many high-resolution delay estimation and direction-finding algorithms in sensing and communication systems. Thus, correctly estimating signal dimension itself becomes crucial. In this paper, we present a deep learning-based signal dimension estimator (DLSDE) with single-snapshot observation in the example application of phased array radar. Unlike traditional model-based and existing deep learning-based signal dimension estimators relying on eigen-decomposition and information criterion, to which multiple data snapshots would be needed, the proposed DLSDE uses two-dimensional convolutional neural network (2D-CNN) to automatically develop features corresponding to the dimension of the received signal. Our study shows that DLSDE significantly outperforms traditional methods in terms of the successful detection rate and resolution. In a phased array radar with 32 antenna elements, DLSDE improves detection Signal to Noise Ratio (SNR) by >15dB and resolution by >1{\deg}. This makes the proposed method suitable for distinguishing multiple signals that are spatially correlated or have small angular separation. More importantly, our solution operates with a single snapshot signal, which is incompatible with other existing deep learning-based methods.
Advancing the Control of Low-Altitude Wireless Networks: Architecture, Design Principles, and Future Directions
Aug 11, 2025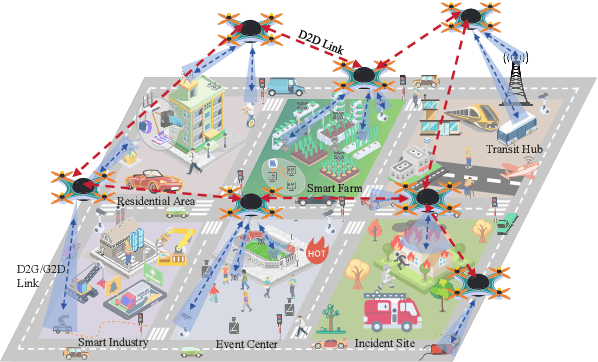

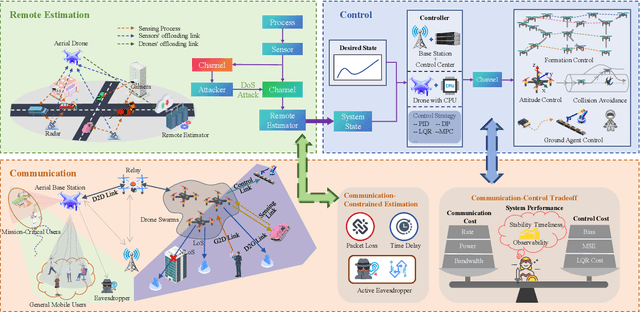
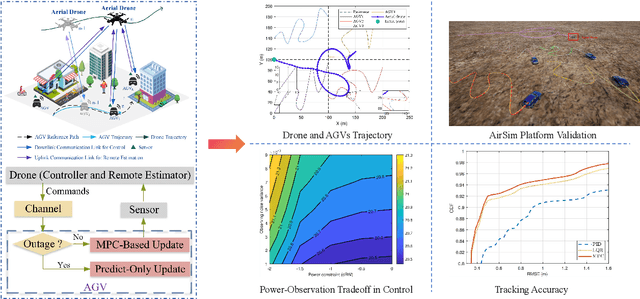
This article introduces a control-oriented low-altitude wireless network (LAWN) that integrates near-ground communications and remote estimation of the internal system state. This integration supports reliable networked control in dynamic aerial-ground environments. First, we introduce the network's modular architecture and key performance metrics. Then, we discuss core design trade-offs across the control, communication, and estimation layers. A case study illustrates closed-loop coordination under wireless constraints. Finally, we outline future directions for scalable, resilient LAWN deployments in real-time and resource-constrained scenarios.
From Ground to Sky: Architectures, Applications, and Challenges Shaping Low-Altitude Wireless Networks
Jun 14, 2025In this article, we introduce a novel low-altitude wireless network (LAWN), which is a reconfigurable, three-dimensional (3D) layered architecture. In particular, the LAWN integrates connectivity, sensing, control, and computing across aerial and terrestrial nodes that enable seamless operation in complex, dynamic, and mission-critical environments. In this article, we introduce a novel low-altitude wireless network (LAWN), which is a reconfigurable, three-dimensional (3D) layered architecture. Different from the conventional aerial communication systems, LAWN's distinctive feature is its tight integration of functional planes in which multiple functionalities continually reshape themselves to operate safely and efficiently in the low-altitude sky. With the LAWN, we discuss several enabling technologies, such as integrated sensing and communication (ISAC), semantic communication, and fully-actuated control systems. Finally, we identify potential applications and key cross-layer challenges. This article offers a comprehensive roadmap for future research and development in the low-altitude airspace.
EdgePrompt: A Distributed Key-Value Inference Framework for LLMs in 6G Networks
Apr 16, 2025As sixth-generation (6G) networks advance, large language models (LLMs) are increasingly integrated into 6G infrastructure to enhance network management and intelligence. However, traditional LLMs architecture struggle to meet the stringent latency and security requirements of 6G, especially as the increasing in sequence length leads to greater task complexity. This paper proposes Edge-Prompt, a cloud-edge collaborative framework based on a hierarchical attention splicing mechanism. EdgePrompt employs distributed key-value (KV) pair optimization techniques to accelerate inference and adapt to network conditions. Additionally, to reduce the risk of data leakage, EdgePrompt incorporates a privacy preserving strategy by isolating sensitive information during processing. Experiments on public dataset show that EdgePrompt effectively improves the inference throughput and reduces the latency, which provides a reliable solution for LLMs deployment in 6G environments.
Uniform Planar Array Based Weighted Cooperative Spectrum Sensing for Cognitive Radio Networks
Apr 14, 2025Cooperative spectrum sensing (CSS) is essential for improving the spectrum efficiency and reliability of cognitive radio applications. Next-generation wireless communication networks increasingly employ uniform planar arrays (UPA) due to their ability to steer beamformers towards desired directions, mitigating interference and eavesdropping. However, the application of UPA-based CSS in cognitive radio remains largely unexplored. This paper proposes a multi-beam UPA-based weighted CSS (WCSS) framework to enhance detection reliability, applicable to various cognitive radio networks, including cellular, vehicular, and satellite communications. We first propose a weighting factor for commonly used energy detection (ED) and eigenvalue detection (EVD) techniques, based on the spatial variation of signal strengths resulting from UPA antenna beamforming. We then analytically characterize the performance of both weighted ED and weighted EVD by deriving closed-form expressions for false alarm and detection probabilities. Our numerical results, considering both static and dynamic user behaviors, demonstrate the superiority of WCSS in enhancing sensing performance compared to uniformly weighted detectors.
Toward Agentic AI: Generative Information Retrieval Inspired Intelligent Communications and Networking
Feb 24, 2025



The increasing complexity and scale of modern telecommunications networks demand intelligent automation to enhance efficiency, adaptability, and resilience. Agentic AI has emerged as a key paradigm for intelligent communications and networking, enabling AI-driven agents to perceive, reason, decide, and act within dynamic networking environments. However, effective decision-making in telecom applications, such as network planning, management, and resource allocation, requires integrating retrieval mechanisms that support multi-hop reasoning, historical cross-referencing, and compliance with evolving 3GPP standards. This article presents a forward-looking perspective on generative information retrieval-inspired intelligent communications and networking, emphasizing the role of knowledge acquisition, processing, and retrieval in agentic AI for telecom systems. We first provide a comprehensive review of generative information retrieval strategies, including traditional retrieval, hybrid retrieval, semantic retrieval, knowledge-based retrieval, and agentic contextual retrieval. We then analyze their advantages, limitations, and suitability for various networking scenarios. Next, we present a survey about their applications in communications and networking. Additionally, we introduce an agentic contextual retrieval framework to enhance telecom-specific planning by integrating multi-source retrieval, structured reasoning, and self-reflective validation. Experimental results demonstrate that our framework significantly improves answer accuracy, explanation consistency, and retrieval efficiency compared to traditional and semantic retrieval methods. Finally, we outline future research directions.
Online Optimization for Learning to Communicate over Time-Correlated Channels
Sep 01, 2024



Machine learning techniques have garnered great interest in designing communication systems owing to their capacity in tacking with channel uncertainty. To provide theoretical guarantees for learning-based communication systems, some recent works analyze generalization bounds for devised methods based on the assumption of Independently and Identically Distributed (I.I.D.) channels, a condition rarely met in practical scenarios. In this paper, we drop the I.I.D. channel assumption and study an online optimization problem of learning to communicate over time-correlated channels. To address this issue, we further focus on two specific tasks: optimizing channel decoders for time-correlated fading channels and selecting optimal codebooks for time-correlated additive noise channels. For utilizing temporal dependence of considered channels to better learn communication systems, we develop two online optimization algorithms based on the optimistic online mirror descent framework. Furthermore, we provide theoretical guarantees for proposed algorithms via deriving sub-linear regret bound on the expected error probability of learned systems. Extensive simulation experiments have been conducted to validate that our presented approaches can leverage the channel correlation to achieve a lower average symbol error rate compared to baseline methods, consistent with our theoretical findings.