 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGoal-Oriented Communication, Estimation, and Control over Bidirectional Wireless Links
Paper and Code
Jan 02, 2024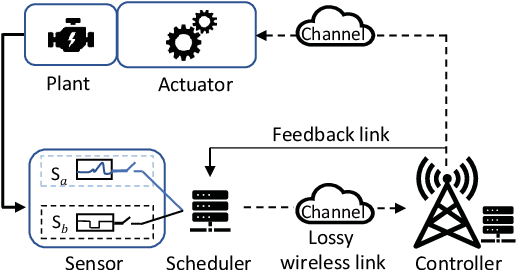
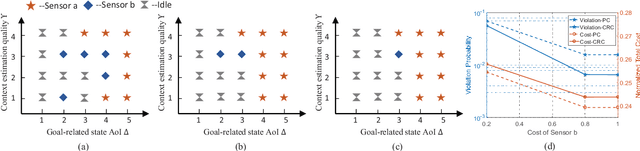
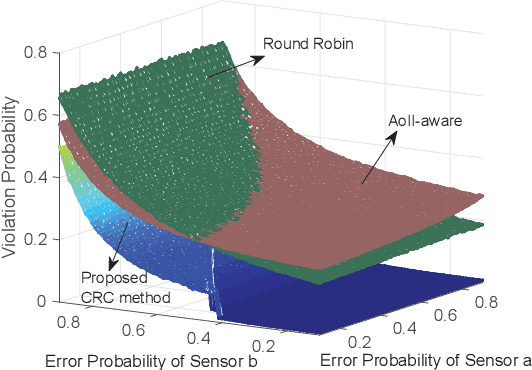
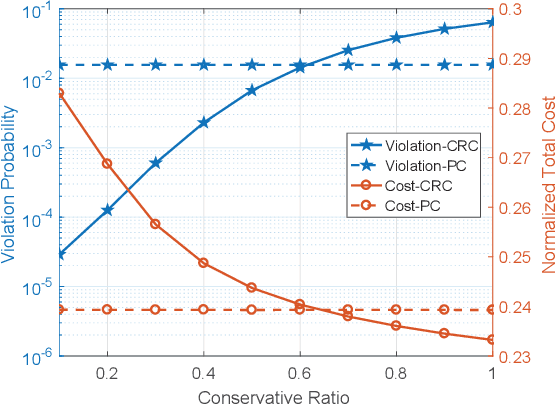
We consider a wireless networked control system (WNCS) with bidirectional imperfect links for real-time applications such as smart grids. To maintain the stability of WNCS, captured by the probability that plant state violates preset values, at minimal cost, heterogeneous physical processes are monitored by multiple sensors. This status information, such as dynamic plant state and Markov Process-based context information, is then received/estimated by the controller for remote control. However, scheduling multiple sensors and designing the controller with limited resources is challenging due to their coupling, delay, and transmission loss. We formulate a Constrained Markov Decision Problem (CMDP) to minimize violation probability with cost constraints. We reveal the relationship between the goal and different updating actions by analyzing the significance of information that incorporates goal-related usefulness and contextual importance. Subsequently, a goal-oriented deterministic scheduling policy is proposed. Two sensing-assisted control strategies and a control-aware estimation policy are proposed to improve the violation probability-cost tradeoff, integrated with the scheduling policy to form a goal-oriented co-design framework. Additionally, we explore retransmission in downlink transmission and qualitatively analyze its preference scenario. Simulation results demonstrate that the proposed goal-oriented co-design policy outperforms previous work in simultaneously reducing violation probability and cost