 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Deep Learning based Signal Dimension Estimator with Single Snapshot Signal in Phased Array Radar Application
Aug 14, 2025Signal dimension, defined here as the number of copies with different delays or angular shifts, is a prerequisite for many high-resolution delay estimation and direction-finding algorithms in sensing and communication systems. Thus, correctly estimating signal dimension itself becomes crucial. In this paper, we present a deep learning-based signal dimension estimator (DLSDE) with single-snapshot observation in the example application of phased array radar. Unlike traditional model-based and existing deep learning-based signal dimension estimators relying on eigen-decomposition and information criterion, to which multiple data snapshots would be needed, the proposed DLSDE uses two-dimensional convolutional neural network (2D-CNN) to automatically develop features corresponding to the dimension of the received signal. Our study shows that DLSDE significantly outperforms traditional methods in terms of the successful detection rate and resolution. In a phased array radar with 32 antenna elements, DLSDE improves detection Signal to Noise Ratio (SNR) by >15dB and resolution by >1{\deg}. This makes the proposed method suitable for distinguishing multiple signals that are spatially correlated or have small angular separation. More importantly, our solution operates with a single snapshot signal, which is incompatible with other existing deep learning-based methods.
Goal-Oriented Integration of Sensing, Communication, Computing, and Control for Mission-Critical Internet-of-Things
Jan 02, 2024Driven by the development goal of network paradigm and demand for various functions in the sixth-generation (6G) mission-critical Internet-of-Things (MC-IoT), we foresee a goal-oriented integration of sensing, communication, computing, and control (GIS3C) in this paper. We first provide an overview of the tasks, requirements, and challenges of MC-IoT. Then we introduce an end-to-end GIS3C architecture, in which goal-oriented communication is leveraged to bridge and empower sensing, communication, control, and computing functionalities. By revealing the interplay among multiple subsystems in terms of key performance indicators and parameters, this paper introduces unified metrics, i.e., task completion effectiveness and cost, to facilitate S3C co-design in MC-IoT. The preliminary results demonstrate the benefits of GIS3C in improving task completion effectiveness while reducing costs. We also identify and highlight the gaps and challenges in applying GIS3C in the future 6G networks.
Goal-Oriented Communication, Estimation, and Control over Bidirectional Wireless Links
Jan 02, 2024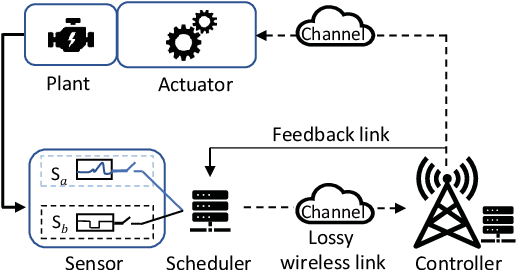
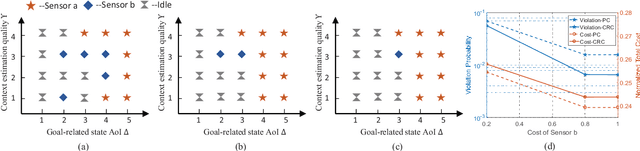
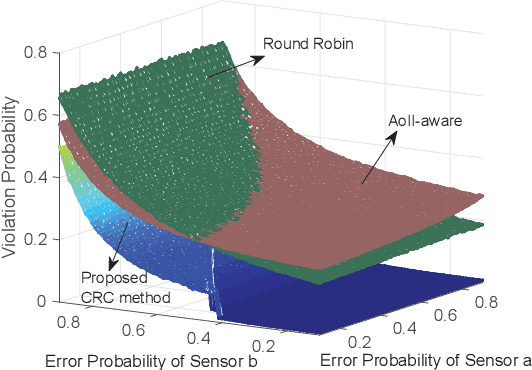
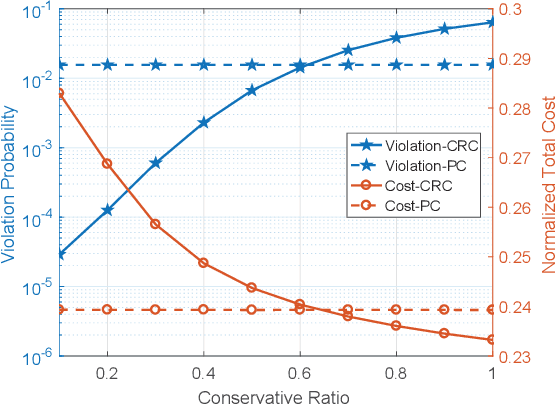
We consider a wireless networked control system (WNCS) with bidirectional imperfect links for real-time applications such as smart grids. To maintain the stability of WNCS, captured by the probability that plant state violates preset values, at minimal cost, heterogeneous physical processes are monitored by multiple sensors. This status information, such as dynamic plant state and Markov Process-based context information, is then received/estimated by the controller for remote control. However, scheduling multiple sensors and designing the controller with limited resources is challenging due to their coupling, delay, and transmission loss. We formulate a Constrained Markov Decision Problem (CMDP) to minimize violation probability with cost constraints. We reveal the relationship between the goal and different updating actions by analyzing the significance of information that incorporates goal-related usefulness and contextual importance. Subsequently, a goal-oriented deterministic scheduling policy is proposed. Two sensing-assisted control strategies and a control-aware estimation policy are proposed to improve the violation probability-cost tradeoff, integrated with the scheduling policy to form a goal-oriented co-design framework. Additionally, we explore retransmission in downlink transmission and qualitatively analyze its preference scenario. Simulation results demonstrate that the proposed goal-oriented co-design policy outperforms previous work in simultaneously reducing violation probability and cost