 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTTA-Vid: Generalized Test-Time Adaptation for Video Reasoning
Apr 01, 2026Recent video reasoning models have shown strong results on temporal and multimodal understanding, yet they depend on large-scale supervised data and multi-stage training pipelines, making them costly to train and difficult to adapt to new domains. In this work, we leverage the paradigm of Test-Time Reinforcement Learning on video-language data to allow for adapting a pretrained model to incoming video samples at test-time without explicit labels. The proposed test-time adaptation for video approach (TTA-Vid) combines two components that work simultaneously: (1) a test-time adaptation that performs step-by-step reasoning at inference time on multiple frame subsets. We then use a batch-aware frequency-based reward computed across different frame subsets as pseudo ground truth to update the model. It shows that the resulting model trained on a single batch or even a single sample from a dataset, is able to generalize at test-time to the whole dataset and even across datasets. Because the adaptation occurs entirely at test time, our method requires no ground-truth annotations or dedicated training splits. Additionally, we propose a multi-armed bandit strategy for adaptive frame selection that learns to prioritize informative frames, guided by the same reward formulation. Our evaluation shows that TTA-Vid yields consistent improvements across various video reasoning tasks and is able to outperform current state-of-the-art methods trained on large-scale data. This highlights the potential of test-time reinforcement learning for temporal multimodal understanding.
CALM: Class-Conditional Sparse Attention Vectors for Large Audio-Language Models
Feb 06, 2026Large audio-language models (LALMs) exhibit strong zero-shot capabilities in multiple downstream tasks, such as audio question answering (AQA) and abstract reasoning; however, these models still lag behind specialized models for certain discriminative tasks (e.g., audio classification). Recent studies show that sparse subsets of attention heads within an LALM can serve as strong discriminative feature extractors for downstream tasks such as classification via simple voting schemes. However, these methods assign uniform weights to all selected heads, implicitly assuming that each head contributes equally across all semantic categories. In this work, we propose Class-Conditional Sparse Attention Vectors for Large Audio-Language Models, a few-shot classification method that learns class-dependent importance weights over attention heads. This formulation allows individual heads to specialize in distinct semantic categories and to contribute to ensemble predictions proportionally to their estimated reliability. Experiments on multiple few-shot audio and audiovisual classification benchmarks and tasks demonstrate that our method consistently outperforms state-of-the-art uniform voting-based approaches by up to 14.52%, 1.53%, 8.35% absolute gains for audio classification, audio-visual classification, and spoofing detection respectively.
Overflow Prevention Enhances Long-Context Recurrent LLMs
May 12, 2025A recent trend in LLMs is developing recurrent sub-quadratic models that improve long-context processing efficiency. We investigate leading large long-context models, focusing on how their fixed-size recurrent memory affects their performance. Our experiments reveal that, even when these models are trained for extended contexts, their use of long contexts remains underutilized. Specifically, we demonstrate that a chunk-based inference procedure, which identifies and processes only the most relevant portion of the input can mitigate recurrent memory failures and be effective for many long-context tasks: On LongBench, our method improves the overall performance of Falcon3-Mamba-Inst-7B by 14%, Falcon-Mamba-Inst-7B by 28%, RecurrentGemma-IT-9B by 50%, and RWKV6-Finch-7B by 51%. Surprisingly, this simple approach also leads to state-of-the-art results in the challenging LongBench v2 benchmark, showing competitive performance with equivalent size Transformers. Furthermore, our findings raise questions about whether recurrent models genuinely exploit long-range dependencies, as our single-chunk strategy delivers stronger performance - even in tasks that presumably require cross-context relations.
Exploring Modality Guidance to Enhance VFM-based Feature Fusion for UDA in 3D Semantic Segmentation
Apr 19, 2025Vision Foundation Models (VFMs) have become a de facto choice for many downstream vision tasks, like image classification, image segmentation, and object localization. However, they can also provide significant utility for downstream 3D tasks that can leverage the cross-modal information (e.g., from paired image data). In our work, we further explore the utility of VFMs for adapting from a labeled source to unlabeled target data for the task of LiDAR-based 3D semantic segmentation. Our method consumes paired 2D-3D (image and point cloud) data and relies on the robust (cross-domain) features from a VFM to train a 3D backbone on a mix of labeled source and unlabeled target data. At the heart of our method lies a fusion network that is guided by both the image and point cloud streams, with their relative contributions adjusted based on the target domain. We extensively compare our proposed methodology with different state-of-the-art methods in several settings and achieve strong performance gains. For example, achieving an average improvement of 6.5 mIoU (over all tasks), when compared with the previous state-of-the-art.
Teaching VLMs to Localize Specific Objects from In-context Examples
Nov 20, 2024



Vision-Language Models (VLMs) have shown remarkable capabilities across diverse visual tasks, including image recognition, video understanding, and Visual Question Answering (VQA) when explicitly trained for these tasks. Despite these advances, we find that current VLMs lack a fundamental cognitive ability: learning to localize objects in a scene by taking into account the context. In this work, we focus on the task of few-shot personalized localization, where a model is given a small set of annotated images (in-context examples) -- each with a category label and bounding box -- and is tasked with localizing the same object type in a query image. To provoke personalized localization abilities in models, we present a data-centric solution that fine-tunes them using carefully curated data from video object tracking datasets. By leveraging sequences of frames tracking the same object across multiple shots, we simulate instruction-tuning dialogues that promote context awareness. To reinforce this, we introduce a novel regularization technique that replaces object labels with pseudo-names, ensuring the model relies on visual context rather than prior knowledge. Our method significantly enhances few-shot localization performance without sacrificing generalization, as demonstrated on several benchmarks tailored to personalized localization. This work is the first to explore and benchmark personalized few-shot localization for VLMs, laying a foundation for future research in context-driven vision-language applications. The code for our project is available at https://github.com/SivanDoveh/IPLoc
LiveXiv -- A Multi-Modal Live Benchmark Based on Arxiv Papers Content
Oct 15, 2024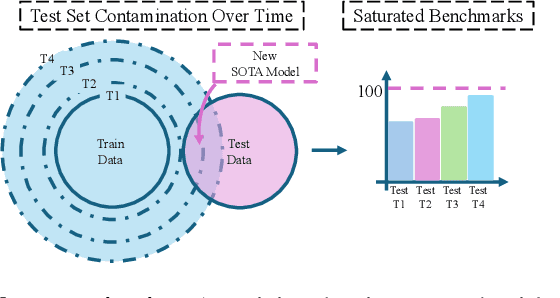



The large-scale training of multi-modal models on data scraped from the web has shown outstanding utility in infusing these models with the required world knowledge to perform effectively on multiple downstream tasks. However, one downside of scraping data from the web can be the potential sacrifice of the benchmarks on which the abilities of these models are often evaluated. To safeguard against test data contamination and to truly test the abilities of these foundation models we propose LiveXiv: A scalable evolving live benchmark based on scientific ArXiv papers. LiveXiv accesses domain-specific manuscripts at any given timestamp and proposes to automatically generate visual question-answer pairs (VQA). This is done without any human-in-the-loop, using the multi-modal content in the manuscripts, like graphs, charts, and tables. Moreover, we introduce an efficient evaluation approach that estimates the performance of all models on the evolving benchmark using evaluations of only a subset of models. This significantly reduces the overall evaluation cost. We benchmark multiple open and proprietary Large Multi-modal Models (LMMs) on the first version of our benchmark, showing its challenging nature and exposing the models true abilities, avoiding contamination. Lastly, in our commitment to high quality, we have collected and evaluated a manually verified subset. By comparing its overall results to our automatic annotations, we have found that the performance variance is indeed minimal (<2.5%). Our dataset is available online on HuggingFace, and our code will be available here.
GLOV: Guided Large Language Models as Implicit Optimizers for Vision Language Models
Oct 08, 2024



In this work, we propose a novel method (GLOV) enabling Large Language Models (LLMs) to act as implicit Optimizers for Vision-Langugage Models (VLMs) to enhance downstream vision tasks. Our GLOV meta-prompts an LLM with the downstream task description, querying it for suitable VLM prompts (e.g., for zero-shot classification with CLIP). These prompts are ranked according to a purity measure obtained through a fitness function. In each respective optimization step, the ranked prompts are fed as in-context examples (with their accuracies) to equip the LLM with the knowledge of the type of text prompts preferred by the downstream VLM. Furthermore, we also explicitly steer the LLM generation process in each optimization step by specifically adding an offset difference vector of the embeddings from the positive and negative solutions found by the LLM, in previous optimization steps, to the intermediate layer of the network for the next generation step. This offset vector steers the LLM generation toward the type of language preferred by the downstream VLM, resulting in enhanced performance on the downstream vision tasks. We comprehensively evaluate our GLOV on 16 diverse datasets using two families of VLMs, i.e., dual-encoder (e.g., CLIP) and encoder-decoder (e.g., LLaVa) models -- showing that the discovered solutions can enhance the recognition performance by up to 15.0% and 57.5% (3.8% and 21.6% on average) for these models.
ConMe: Rethinking Evaluation of Compositional Reasoning for Modern VLMs
Jun 12, 2024



Compositional Reasoning (CR) entails grasping the significance of attributes, relations, and word order. Recent Vision-Language Models (VLMs), comprising a visual encoder and a Large Language Model (LLM) decoder, have demonstrated remarkable proficiency in such reasoning tasks. This prompts a crucial question: have VLMs effectively tackled the CR challenge? We conjecture that existing CR benchmarks may not adequately push the boundaries of modern VLMs due to the reliance on an LLM-only negative text generation pipeline. Consequently, the negatives produced either appear as outliers from the natural language distribution learned by VLMs' LLM decoders or as improbable within the corresponding image context. To address these limitations, we introduce ConMe -- a compositional reasoning benchmark and a novel data generation pipeline leveraging VLMs to produce `hard CR Q&A'. Through a new concept of VLMs conversing with each other to collaboratively expose their weaknesses, our pipeline autonomously generates, evaluates, and selects challenging compositional reasoning questions, establishing a robust CR benchmark, also subsequently validated manually. Our benchmark provokes a noteworthy, up to 33%, decrease in CR performance compared to preceding benchmarks, reinstating the CR challenge even for state-of-the-art VLMs.
Into the Fog: Evaluating Multiple Object Tracking Robustness
Apr 12, 2024



State-of-the-art (SOTA) trackers have shown remarkable Multiple Object Tracking (MOT) performance when trained and evaluated on current benchmarks. However, these benchmarks primarily consist of clear scenarios, overlooking adverse atmospheric conditions such as fog, haze, smoke and dust. As a result, the robustness of SOTA trackers remains underexplored. To address these limitations, we propose a pipeline for physic-based volumetric fog simulation in arbitrary real-world MOT dataset utilizing frame-by-frame monocular depth estimation and a fog formation optical model. Moreover, we enhance our simulation by rendering of both homogeneous and heterogeneous fog effects. We propose to use the dark channel prior method to estimate fog (smoke) color, which shows promising results even in night and indoor scenes. We present the leading tracking benchmark MOTChallenge (MOT17 dataset) overlaid by fog (smoke for indoor scenes) of various intensity levels and conduct a comprehensive evaluation of SOTA MOT methods, revealing their limitations under fog and fog-similar challenges.
Towards Multimodal In-Context Learning for Vision & Language Models
Mar 19, 2024



Inspired by the emergence of Large Language Models (LLMs) that can truly understand human language, significant progress has been made in aligning other, non-language, modalities to be `understandable' by an LLM, primarily via converting their samples into a sequence of embedded language-like tokens directly fed into the LLM (decoder) input stream. However, so far limited attention has been given to transferring (and evaluating) one of the core LLM capabilities to the emerging VLMs, namely the In-Context Learning (ICL) ability, or in other words to guide VLMs to desired target downstream tasks or output structure using in-context image+text demonstrations. In this work, we dive deeper into analyzing the capabilities of some of the state-of-the-art VLMs to follow ICL instructions, discovering them to be somewhat lacking. We discover that even models that underwent large-scale mixed modality pre-training and were implicitly guided to make use of interleaved image and text information (intended to consume helpful context from multiple images) under-perform when prompted with few-shot (ICL) demonstrations, likely due to their lack of `direct' ICL instruction tuning. To test this conjecture, we propose a simple, yet surprisingly effective, strategy of extending a common VLM alignment framework with ICL support, methodology, and curriculum. We explore, analyze, and provide insights into effective data mixes, leading up to a significant 21.03% (and 11.3% on average) ICL performance boost over the strongest VLM baselines and a variety of ICL benchmarks. We also contribute new benchmarks for ICL evaluation in VLMs and discuss their advantages over the prior art.