 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnified Semantic Transformer for 3D Scene Understanding
Dec 18, 2025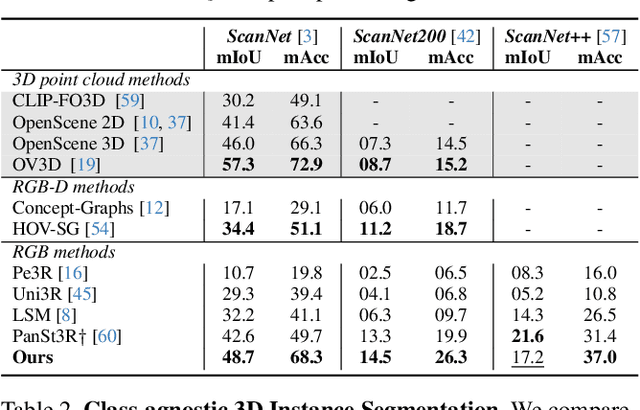
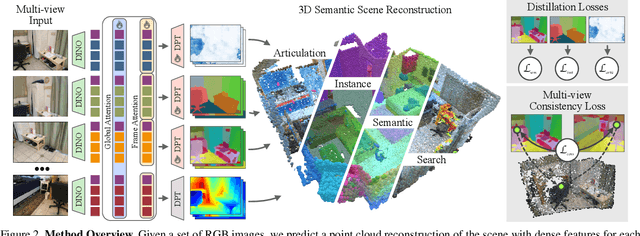
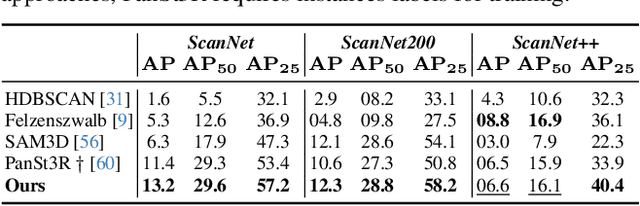
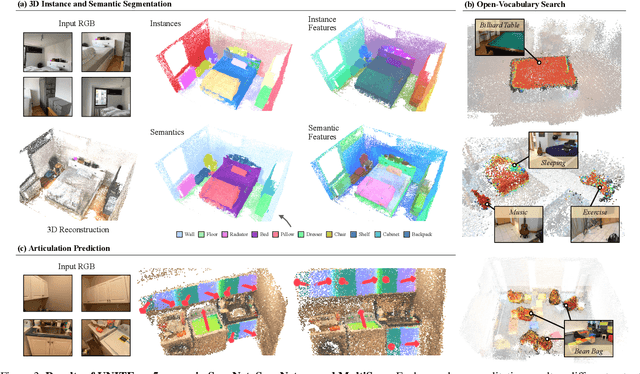
Holistic 3D scene understanding involves capturing and parsing unstructured 3D environments. Due to the inherent complexity of the real world, existing models have predominantly been developed and limited to be task-specific. We introduce UNITE, a Unified Semantic Transformer for 3D scene understanding, a novel feed-forward neural network that unifies a diverse set of 3D semantic tasks within a single model. Our model operates on unseen scenes in a fully end-to-end manner and only takes a few seconds to infer the full 3D semantic geometry. Our approach is capable of directly predicting multiple semantic attributes, including 3D scene segmentation, instance embeddings, open-vocabulary features, as well as affordance and articulations, solely from RGB images. The method is trained using a combination of 2D distillation, heavily relying on self-supervision and leverages novel multi-view losses designed to ensure 3D view consistency. We demonstrate that UNITE achieves state-of-the-art performance on several different semantic tasks and even outperforms task-specific models, in many cases, surpassing methods that operate on ground truth 3D geometry. See the project website at unite-page.github.io
S2D: Sparse-To-Dense Keymask Distillation for Unsupervised Video Instance Segmentation
Dec 16, 2025In recent years, the state-of-the-art in unsupervised video instance segmentation has heavily relied on synthetic video data, generated from object-centric image datasets such as ImageNet. However, video synthesis by artificially shifting and scaling image instance masks fails to accurately model realistic motion in videos, such as perspective changes, movement by parts of one or multiple instances, or camera motion. To tackle this issue, we propose an unsupervised video instance segmentation model trained exclusively on real video data. We start from unsupervised instance segmentation masks on individual video frames. However, these single-frame segmentations exhibit temporal noise and their quality varies through the video. Therefore, we establish temporal coherence by identifying high-quality keymasks in the video by leveraging deep motion priors. The sparse keymask pseudo-annotations are then used to train a segmentation model for implicit mask propagation, for which we propose a Sparse-To-Dense Distillation approach aided by a Temporal DropLoss. After training the final model on the resulting dense labelset, our approach outperforms the current state-of-the-art across various benchmarks.
OpenHype: Hyperbolic Embeddings for Hierarchical Open-Vocabulary Radiance Fields
Oct 24, 2025Modeling the inherent hierarchical structure of 3D objects and 3D scenes is highly desirable, as it enables a more holistic understanding of environments for autonomous agents. Accomplishing this with implicit representations, such as Neural Radiance Fields, remains an unexplored challenge. Existing methods that explicitly model hierarchical structures often face significant limitations: they either require multiple rendering passes to capture embeddings at different levels of granularity, significantly increasing inference time, or rely on predefined, closed-set discrete hierarchies that generalize poorly to the diverse and nuanced structures encountered by agents in the real world. To address these challenges, we propose OpenHype, a novel approach that represents scene hierarchies using a continuous hyperbolic latent space. By leveraging the properties of hyperbolic geometry, OpenHype naturally encodes multi-scale relationships and enables smooth traversal of hierarchies through geodesic paths in latent space. Our method outperforms state-of-the-art approaches on standard benchmarks, demonstrating superior efficiency and adaptability in 3D scene understanding.
Exploring Modality Guidance to Enhance VFM-based Feature Fusion for UDA in 3D Semantic Segmentation
Apr 19, 2025Vision Foundation Models (VFMs) have become a de facto choice for many downstream vision tasks, like image classification, image segmentation, and object localization. However, they can also provide significant utility for downstream 3D tasks that can leverage the cross-modal information (e.g., from paired image data). In our work, we further explore the utility of VFMs for adapting from a labeled source to unlabeled target data for the task of LiDAR-based 3D semantic segmentation. Our method consumes paired 2D-3D (image and point cloud) data and relies on the robust (cross-domain) features from a VFM to train a 3D backbone on a mix of labeled source and unlabeled target data. At the heart of our method lies a fusion network that is guided by both the image and point cloud streams, with their relative contributions adjusted based on the target domain. We extensively compare our proposed methodology with different state-of-the-art methods in several settings and achieve strong performance gains. For example, achieving an average improvement of 6.5 mIoU (over all tasks), when compared with the previous state-of-the-art.
Masked Scene Modeling: Narrowing the Gap Between Supervised and Self-Supervised Learning in 3D Scene Understanding
Apr 09, 2025Self-supervised learning has transformed 2D computer vision by enabling models trained on large, unannotated datasets to provide versatile off-the-shelf features that perform similarly to models trained with labels. However, in 3D scene understanding, self-supervised methods are typically only used as a weight initialization step for task-specific fine-tuning, limiting their utility for general-purpose feature extraction. This paper addresses this shortcoming by proposing a robust evaluation protocol specifically designed to assess the quality of self-supervised features for 3D scene understanding. Our protocol uses multi-resolution feature sampling of hierarchical models to create rich point-level representations that capture the semantic capabilities of the model and, hence, are suitable for evaluation with linear probing and nearest-neighbor methods. Furthermore, we introduce the first self-supervised model that performs similarly to supervised models when only off-the-shelf features are used in a linear probing setup. In particular, our model is trained natively in 3D with a novel self-supervised approach based on a Masked Scene Modeling objective, which reconstructs deep features of masked patches in a bottom-up manner and is specifically tailored to hierarchical 3D models. Our experiments not only demonstrate that our method achieves competitive performance to supervised models, but also surpasses existing self-supervised approaches by a large margin. The model and training code can be found at our Github repository (https://github.com/phermosilla/msm).
Active Learning Inspired ControlNet Guidance for Augmenting Semantic Segmentation Datasets
Mar 12, 2025



Recent advances in conditional image generation from diffusion models have shown great potential in achieving impressive image quality while preserving the constraints introduced by the user. In particular, ControlNet enables precise alignment between ground truth segmentation masks and the generated image content, allowing the enhancement of training datasets in segmentation tasks. This raises a key question: Can ControlNet additionally be guided to generate the most informative synthetic samples for a specific task? Inspired by active learning, where the most informative real-world samples are selected based on sample difficulty or model uncertainty, we propose the first approach to integrate active learning-based selection metrics into the backward diffusion process for sample generation. Specifically, we explore uncertainty, query by committee, and expected model change, which are commonly used in active learning, and demonstrate their application for guiding the sample generation process through gradient approximation. Our method is training-free, modifying only the backward diffusion process, allowing it to be used on any pretrained ControlNet. Using this process, we show that segmentation models trained with guided synthetic data outperform those trained on non-guided synthetic data. Our work underscores the need for advanced control mechanisms for diffusion-based models, which are not only aligned with image content but additionally downstream task performance, highlighting the true potential of synthetic data generation.
Efficient Continuous Group Convolutions for Local SE(3) Equivariance in 3D Point Clouds
Feb 11, 2025Extending the translation equivariance property of convolutional neural networks to larger symmetry groups has been shown to reduce sample complexity and enable more discriminative feature learning. Further, exploiting additional symmetries facilitates greater weight sharing than standard convolutions, leading to an enhanced network expressivity without an increase in parameter count. However, extending the equivariant properties of a convolution layer comes at a computational cost. In particular, for 3D data, expanding equivariance to the SE(3) group (rotation and translation) results in a 6D convolution operation, which is not tractable for larger data samples such as 3D scene scans. While efforts have been made to develop efficient SE(3) equivariant networks, existing approaches rely on discretization or only introduce global rotation equivariance. This limits their applicability to point clouds representing a scene composed of multiple objects. This work presents an efficient, continuous, and local SE(3) equivariant convolution layer for point cloud processing based on general group convolution and local reference frames. Our experiments show that our approach achieves competitive or superior performance across a range of datasets and tasks, including object classification and semantic segmentation, with negligible computational overhead.
RelationField: Relate Anything in Radiance Fields
Dec 18, 2024



Neural radiance fields are an emerging 3D scene representation and recently even been extended to learn features for scene understanding by distilling open-vocabulary features from vision-language models. However, current method primarily focus on object-centric representations, supporting object segmentation or detection, while understanding semantic relationships between objects remains largely unexplored. To address this gap, we propose RelationField, the first method to extract inter-object relationships directly from neural radiance fields. RelationField represents relationships between objects as pairs of rays within a neural radiance field, effectively extending its formulation to include implicit relationship queries. To teach RelationField complex, open-vocabulary relationships, relationship knowledge is distilled from multi-modal LLMs. To evaluate RelationField, we solve open-vocabulary 3D scene graph generation tasks and relationship-guided instance segmentation, achieving state-of-the-art performance in both tasks. See the project website at https://relationfield.github.io.
CutS3D: Cutting Semantics in 3D for 2D Unsupervised Instance Segmentation
Nov 26, 2024Traditionally, algorithms that learn to segment object instances in 2D images have heavily relied on large amounts of human-annotated data. Only recently, novel approaches have emerged tackling this problem in an unsupervised fashion. Generally, these approaches first generate pseudo-masks and then train a class-agnostic detector. While such methods deliver the current state of the art, they often fail to correctly separate instances overlapping in 2D image space since only semantics are considered. To tackle this issue, we instead propose to cut the semantic masks in 3D to obtain the final 2D instances by utilizing a point cloud representation of the scene. Furthermore, we derive a Spatial Importance function, which we use to resharpen the semantics along the 3D borders of instances. Nevertheless, these pseudo-masks are still subject to mask ambiguity. To address this issue, we further propose to augment the training of a class-agnostic detector with three Spatial Confidence components aiming to isolate a clean learning signal. With these contributions, our approach outperforms competing methods across multiple standard benchmarks for unsupervised instance segmentation and object detection.
On the importance of local and global feature learning for automated measurable residual disease detection in flow cytometry data
Nov 23, 2024This paper evaluates various deep learning methods for measurable residual disease (MRD) detection in flow cytometry (FCM) data, addressing questions regarding the benefits of modeling long-range dependencies, methods of obtaining global information, and the importance of learning local features. Based on our findings, we propose two adaptations to the current state-of-the-art (SOTA) model. Our contributions include an enhanced SOTA model, demonstrating superior performance on publicly available datasets and improved generalization across laboratories, as well as valuable insights for the FCM community, guiding future DL architecture designs for FCM data analysis. The code is available at \url{https://github.com/lisaweijler/flowNetworks}.