 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTVBench: Redesigning Video-Language Evaluation
Oct 10, 2024

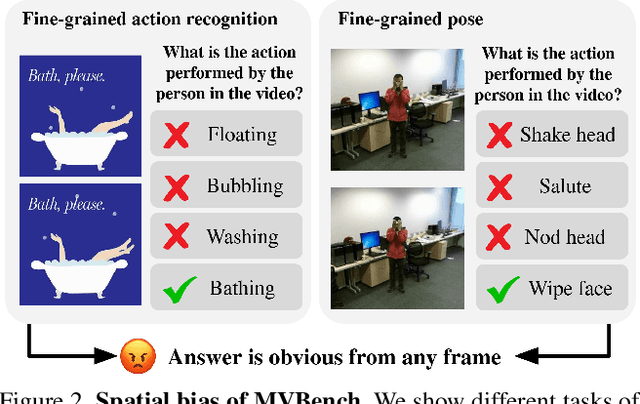
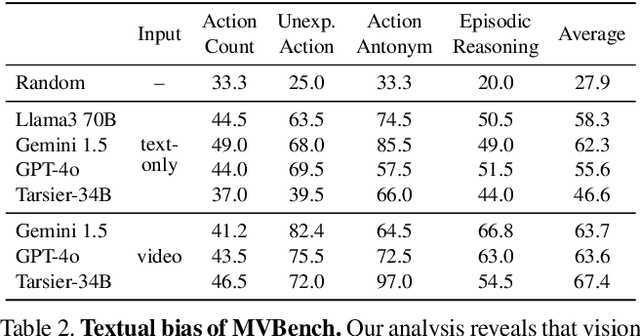
Large language models have demonstrated impressive performance when integrated with vision models even enabling video understanding. However, evaluating these video models presents its own unique challenges, for which several benchmarks have been proposed. In this paper, we show that the currently most used video-language benchmarks can be solved without requiring much temporal reasoning. We identified three main issues in existing datasets: (i) static information from single frames is often sufficient to solve the tasks (ii) the text of the questions and candidate answers is overly informative, allowing models to answer correctly without relying on any visual input (iii) world knowledge alone can answer many of the questions, making the benchmarks a test of knowledge replication rather than visual reasoning. In addition, we found that open-ended question-answering benchmarks for video understanding suffer from similar issues while the automatic evaluation process with LLMs is unreliable, making it an unsuitable alternative. As a solution, we propose TVBench, a novel open-source video multiple-choice question-answering benchmark, and demonstrate through extensive evaluations that it requires a high level of temporal understanding. Surprisingly, we find that most recent state-of-the-art video-language models perform similarly to random performance on TVBench, with only Gemini-Pro and Tarsier clearly surpassing this baseline.
GLOV: Guided Large Language Models as Implicit Optimizers for Vision Language Models
Oct 08, 2024



In this work, we propose a novel method (GLOV) enabling Large Language Models (LLMs) to act as implicit Optimizers for Vision-Langugage Models (VLMs) to enhance downstream vision tasks. Our GLOV meta-prompts an LLM with the downstream task description, querying it for suitable VLM prompts (e.g., for zero-shot classification with CLIP). These prompts are ranked according to a purity measure obtained through a fitness function. In each respective optimization step, the ranked prompts are fed as in-context examples (with their accuracies) to equip the LLM with the knowledge of the type of text prompts preferred by the downstream VLM. Furthermore, we also explicitly steer the LLM generation process in each optimization step by specifically adding an offset difference vector of the embeddings from the positive and negative solutions found by the LLM, in previous optimization steps, to the intermediate layer of the network for the next generation step. This offset vector steers the LLM generation toward the type of language preferred by the downstream VLM, resulting in enhanced performance on the downstream vision tasks. We comprehensively evaluate our GLOV on 16 diverse datasets using two families of VLMs, i.e., dual-encoder (e.g., CLIP) and encoder-decoder (e.g., LLaVa) models -- showing that the discovered solutions can enhance the recognition performance by up to 15.0% and 57.5% (3.8% and 21.6% on average) for these models.
SIGMA: Sinkhorn-Guided Masked Video Modeling
Jul 22, 2024



Video-based pretraining offers immense potential for learning strong visual representations on an unprecedented scale. Recently, masked video modeling methods have shown promising scalability, yet fall short in capturing higher-level semantics due to reconstructing predefined low-level targets such as pixels. To tackle this, we present Sinkhorn-guided Masked Video Modelling (SIGMA), a novel video pretraining method that jointly learns the video model in addition to a target feature space using a projection network. However, this simple modification means that the regular L2 reconstruction loss will lead to trivial solutions as both networks are jointly optimized. As a solution, we distribute features of space-time tubes evenly across a limited number of learnable clusters. By posing this as an optimal transport problem, we enforce high entropy in the generated features across the batch, infusing semantic and temporal meaning into the feature space. The resulting cluster assignments are used as targets for a symmetric prediction task where the video model predicts cluster assignment of the projection network and vice versa. Experimental results on ten datasets across three benchmarks validate the effectiveness of SIGMA in learning more performant, temporally-aware, and robust video representations improving upon state-of-the-art methods. Our project website with code is available at: https://quva-lab.github.io/SIGMA.
PIN: Positional Insert Unlocks Object Localisation Abilities in VLMs
Feb 13, 2024Vision-Language Models (VLMs), such as Flamingo and GPT-4V, have shown immense potential by integrating large language models with vision systems. Nevertheless, these models face challenges in the fundamental computer vision task of object localisation, due to their training on multimodal data containing mostly captions without explicit spatial grounding. While it is possible to construct custom, supervised training pipelines with bounding box annotations that integrate with VLMs, these result in specialized and hard-to-scale models. In this paper, we aim to explore the limits of caption-based VLMs and instead propose to tackle the challenge in a simpler manner by i) keeping the weights of a caption-based VLM frozen and ii) not using any supervised detection data. To this end, we introduce an input-agnostic Positional Insert (PIN), a learnable spatial prompt, containing a minimal set of parameters that are slid inside the frozen VLM, unlocking object localisation capabilities. Our PIN module is trained with a simple next-token prediction task on synthetic data without requiring the introduction of new output heads. Our experiments demonstrate strong zero-shot localisation performances on a variety of images, including Pascal VOC, COCO, LVIS, and diverse images like paintings or cartoons.
SCVRL: Shuffled Contrastive Video Representation Learning
May 24, 2022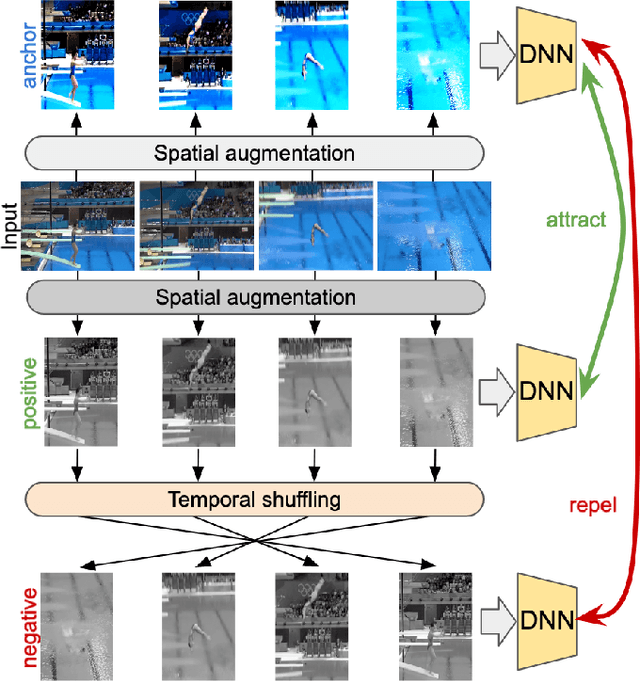
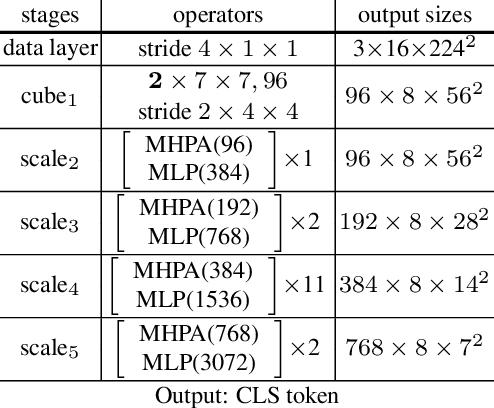
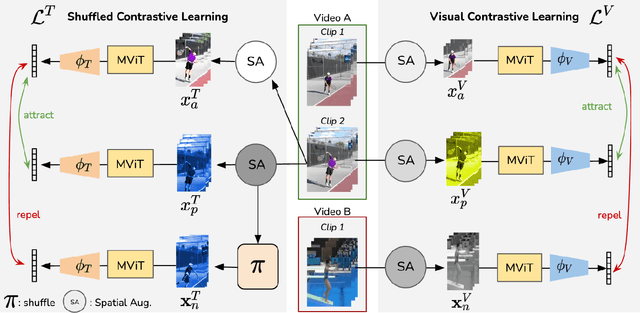
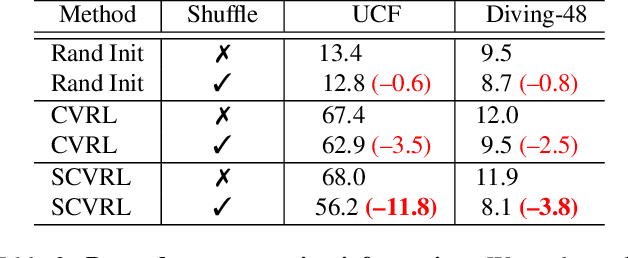
We propose SCVRL, a novel contrastive-based framework for self-supervised learning for videos. Differently from previous contrast learning based methods that mostly focus on learning visual semantics (e.g., CVRL), SCVRL is capable of learning both semantic and motion patterns. For that, we reformulate the popular shuffling pretext task within a modern contrastive learning paradigm. We show that our transformer-based network has a natural capacity to learn motion in self-supervised settings and achieves strong performance, outperforming CVRL on four benchmarks.
iPOKE: Poking a Still Image for Controlled Stochastic Video Synthesis
Jul 06, 2021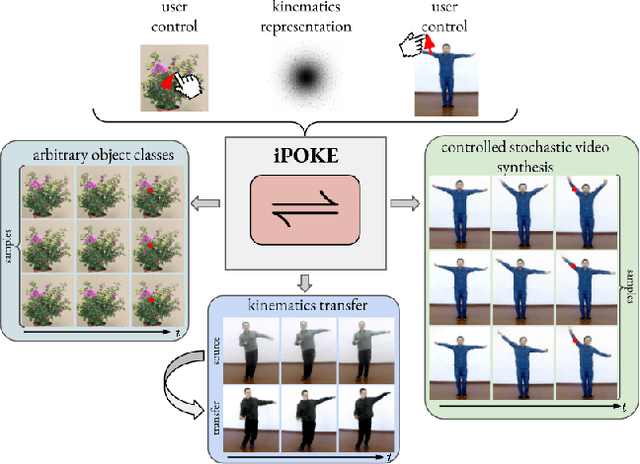
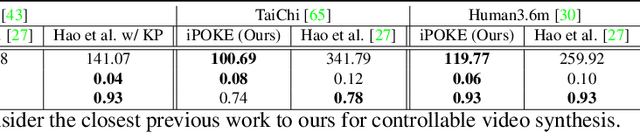
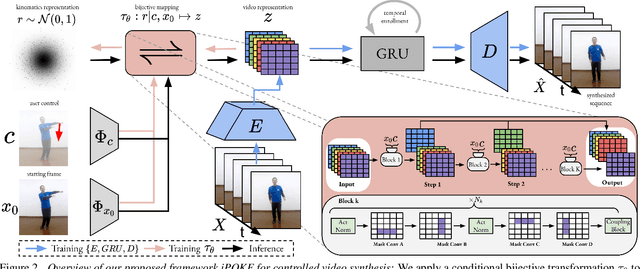

How would a static scene react to a local poke? What are the effects on other parts of an object if you could locally push it? There will be distinctive movement, despite evident variations caused by the stochastic nature of our world. These outcomes are governed by the characteristic kinematics of objects that dictate their overall motion caused by a local interaction. Conversely, the movement of an object provides crucial information about its underlying distinctive kinematics and the interdependencies between its parts. This two-way relation motivates learning a bijective mapping between object kinematics and plausible future image sequences. Therefore, we propose iPOKE - invertible Prediction of Object Kinematics - that, conditioned on an initial frame and a local poke, allows to sample object kinematics and establishes a one-to-one correspondence to the corresponding plausible videos, thereby providing a controlled stochastic video synthesis. In contrast to previous works, we do not generate arbitrary realistic videos, but provide efficient control of movements, while still capturing the stochastic nature of our environment and the diversity of plausible outcomes it entails. Moreover, our approach can transfer kinematics onto novel object instances and is not confined to particular object classes. Project page is available at https://bit.ly/3dJN4Lf
Understanding Object Dynamics for Interactive Image-to-Video Synthesis
Jun 21, 2021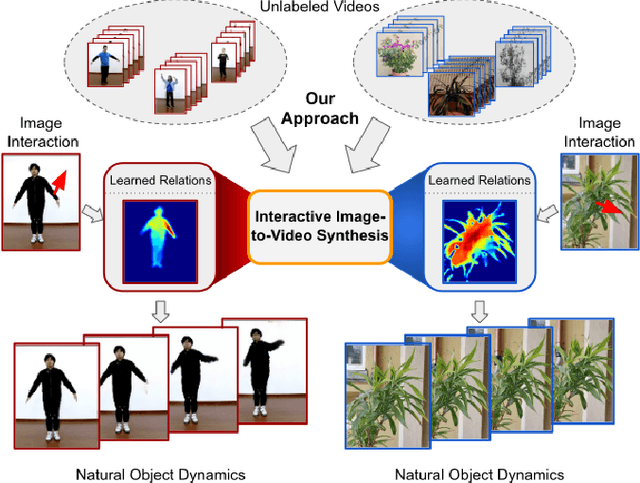
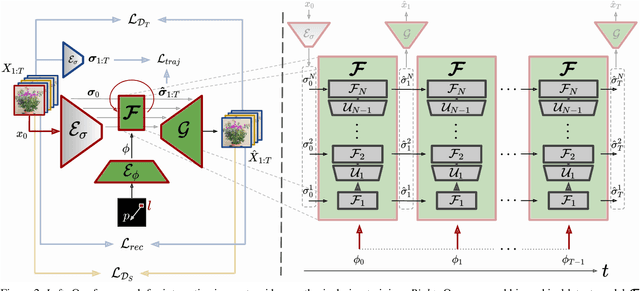

What would be the effect of locally poking a static scene? We present an approach that learns naturally-looking global articulations caused by a local manipulation at a pixel level. Training requires only videos of moving objects but no information of the underlying manipulation of the physical scene. Our generative model learns to infer natural object dynamics as a response to user interaction and learns about the interrelations between different object body regions. Given a static image of an object and a local poking of a pixel, the approach then predicts how the object would deform over time. In contrast to existing work on video prediction, we do not synthesize arbitrary realistic videos but enable local interactive control of the deformation. Our model is not restricted to particular object categories and can transfer dynamics onto novel unseen object instances. Extensive experiments on diverse objects demonstrate the effectiveness of our approach compared to common video prediction frameworks. Project page is available at https://bit.ly/3cxfA2L .
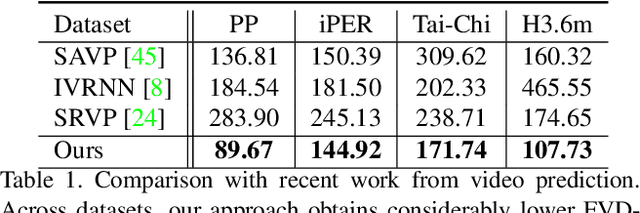
Stochastic Image-to-Video Synthesis using cINNs
May 10, 2021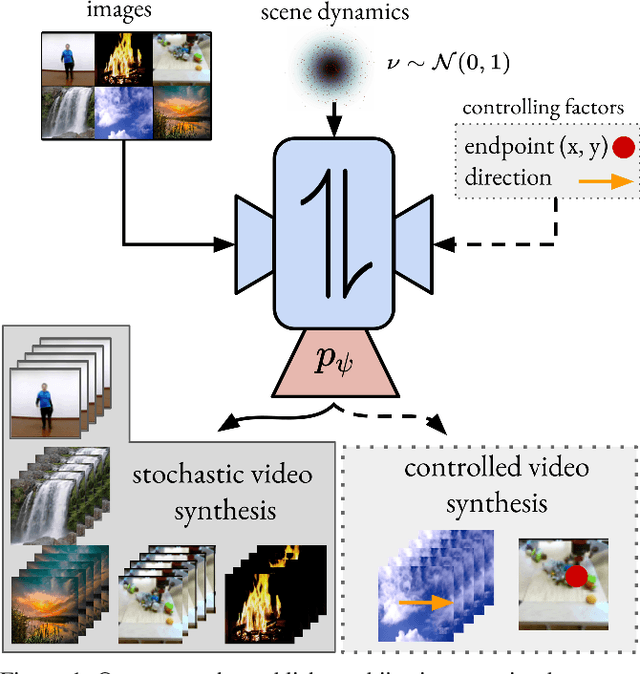
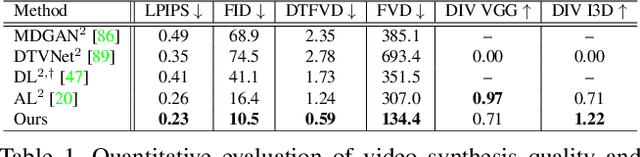
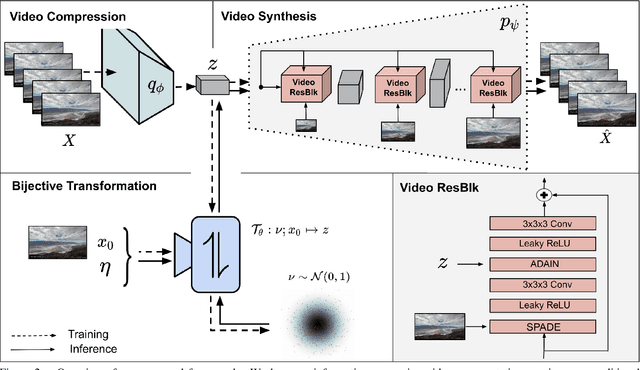
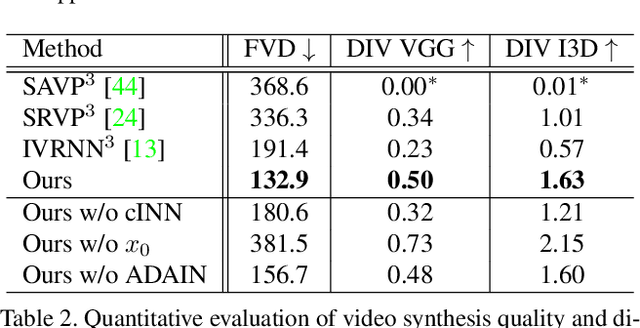
Video understanding calls for a model to learn the characteristic interplay between static scene content and its dynamics: Given an image, the model must be able to predict a future progression of the portrayed scene and, conversely, a video should be explained in terms of its static image content and all the remaining characteristics not present in the initial frame. This naturally suggests a bijective mapping between the video domain and the static content as well as residual information. In contrast to common stochastic image-to-video synthesis, such a model does not merely generate arbitrary videos progressing the initial image. Given this image, it rather provides a one-to-one mapping between the residual vectors and the video with stochastic outcomes when sampling. The approach is naturally implemented using a conditional invertible neural network (cINN) that can explain videos by independently modelling static and other video characteristics, thus laying the basis for controlled video synthesis. Experiments on four diverse video datasets demonstrate the effectiveness of our approach in terms of both the quality and diversity of the synthesized results. Our project page is available at https://bit.ly/3t66bnU.
Behavior-Driven Synthesis of Human Dynamics
Mar 08, 2021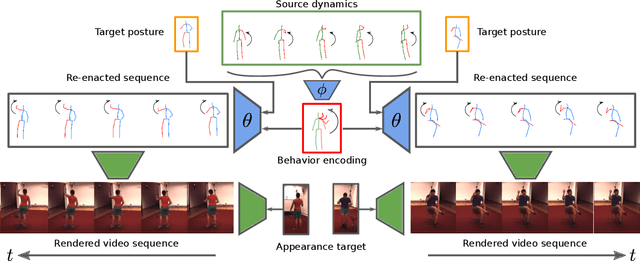

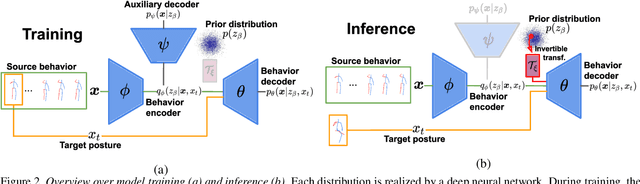
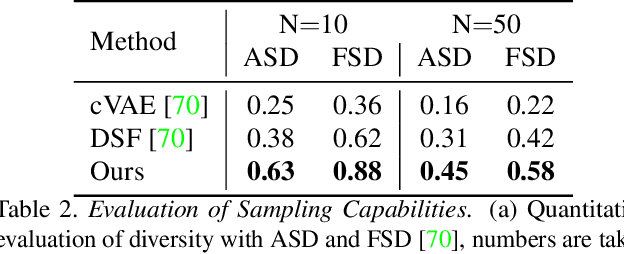
Generating and representing human behavior are of major importance for various computer vision applications. Commonly, human video synthesis represents behavior as sequences of postures while directly predicting their likely progressions or merely changing the appearance of the depicted persons, thus not being able to exercise control over their actual behavior during the synthesis process. In contrast, controlled behavior synthesis and transfer across individuals requires a deep understanding of body dynamics and calls for a representation of behavior that is independent of appearance and also of specific postures. In this work, we present a model for human behavior synthesis which learns a dedicated representation of human dynamics independent of postures. Using this representation, we are able to change the behavior of a person depicted in an arbitrary posture, or to even directly transfer behavior observed in a given video sequence. To this end, we propose a conditional variational framework which explicitly disentangles posture from behavior. We demonstrate the effectiveness of our approach on this novel task, evaluating capturing, transferring, and sampling fine-grained, diverse behavior, both quantitatively and qualitatively. Project page is available at https://cutt.ly/5l7rXEp
uBAM: Unsupervised Behavior Analysis and Magnification using Deep Learning
Dec 16, 2020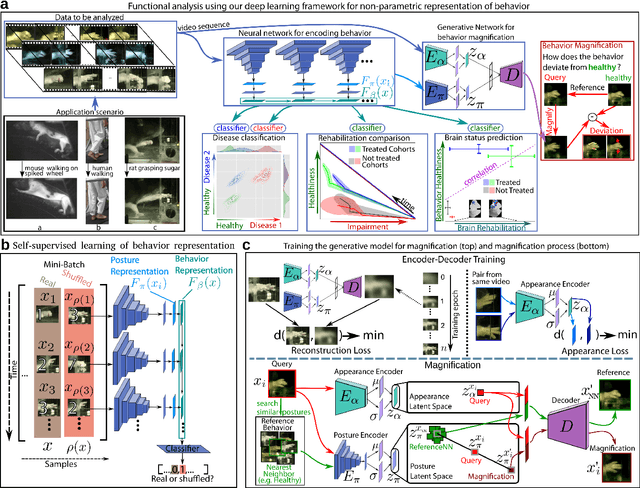
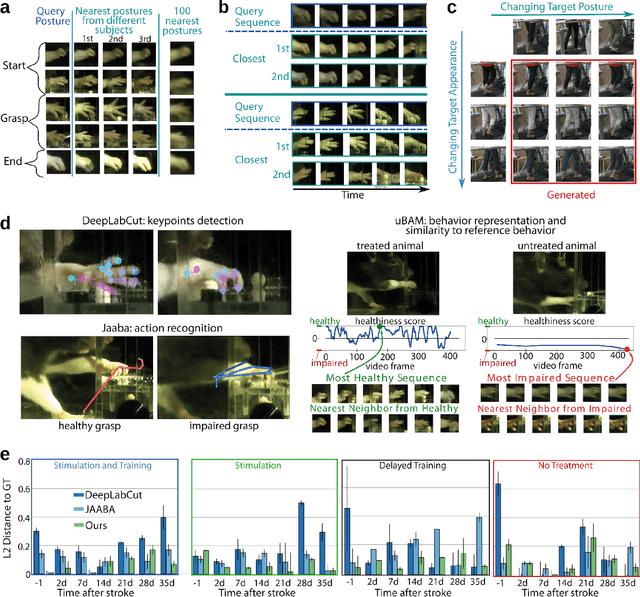
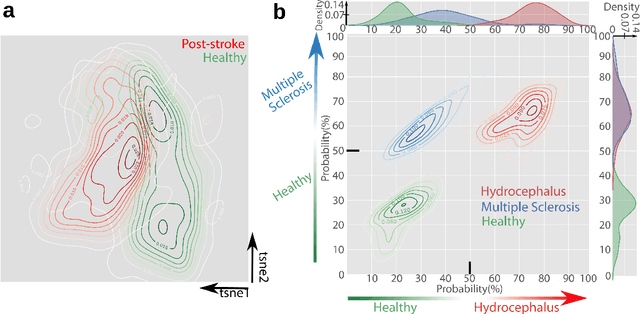
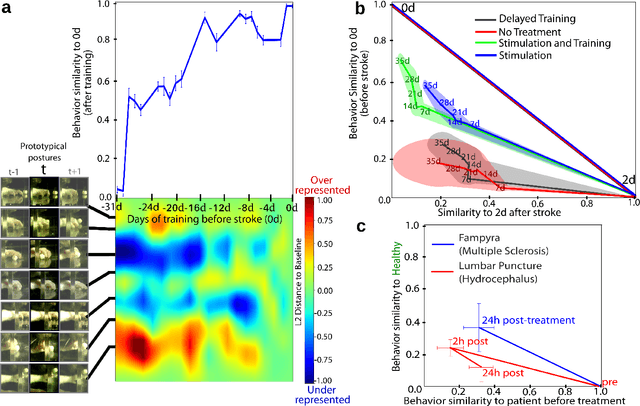
Motor behavior analysis is essential to biomedical research and clinical diagnostics as it provides a non-invasive strategy for identifying motor impairment and its change caused by interventions. State-of-the-art instrumented movement analysis is time- and cost-intensive, since it requires placing physical or virtual markers. Besides the effort required for marking keypoints or annotations necessary for training or finetuning a detector, users need to know the interesting behavior beforehand to provide meaningful keypoints. We introduce uBAM, a novel, automatic deep learning algorithm for behavior analysis by discovering and magnifying deviations. We propose an unsupervised learning of posture and behavior representations that enable an objective behavior comparison across subjects. A generative model with novel disentanglement of appearance and behavior magnifies subtle behavior differences across subjects directly in a video without requiring a detour via keypoints or annotations. Evaluations on rodents and human patients with neurological diseases demonstrate the wide applicability of our approach.