 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAtlas 2 - Foundation models for clinical deployment
Jan 08, 2026Pathology foundation models substantially advanced the possibilities in computational pathology -- yet tradeoffs in terms of performance, robustness, and computational requirements remained, which limited their clinical deployment. In this report, we present Atlas 2, Atlas 2-B, and Atlas 2-S, three pathology vision foundation models which bridge these shortcomings by showing state-of-the-art performance in prediction performance, robustness, and resource efficiency in a comprehensive evaluation across eighty public benchmarks. Our models were trained on the largest pathology foundation model dataset to date comprising 5.5 million histopathology whole slide images, collected from three medical institutions Charité - Universtätsmedizin Berlin, LMU Munich, and Mayo Clinic.
Mind the Gap: Continuous Magnification Sampling for Pathology Foundation Models
Jan 05, 2026In histopathology, pathologists examine both tissue architecture at low magnification and fine-grained morphology at high magnification. Yet, the performance of pathology foundation models across magnifications and the effect of magnification sampling during training remain poorly understood. We model magnification sampling as a multi-source domain adaptation problem and develop a simple theoretical framework that reveals systematic trade-offs between sampling strategies. We show that the widely used discrete uniform sampling of magnifications (0.25, 0.5, 1.0, 2.0 mpp) leads to degradation at intermediate magnifications. We introduce continuous magnification sampling, which removes gaps in magnification coverage while preserving performance at standard scales. Further, we derive sampling distributions that optimize representation quality across magnification scales. To evaluate these strategies, we introduce two new benchmarks (TCGA-MS, BRACS-MS) with appropriate metrics. Our experiments show that continuous sampling substantially improves over discrete sampling at intermediate magnifications, with gains of up to 4 percentage points in balanced classification accuracy, and that optimized distributions can further improve performance. Finally, we evaluate current histopathology foundation models, finding that magnification is a primary driver of performance variation across models. Our work paves the way towards future pathology foundation models that perform reliably across magnifications.
Atlas: A Novel Pathology Foundation Model by Mayo Clinic, Charité, and Aignostics
Jan 10, 2025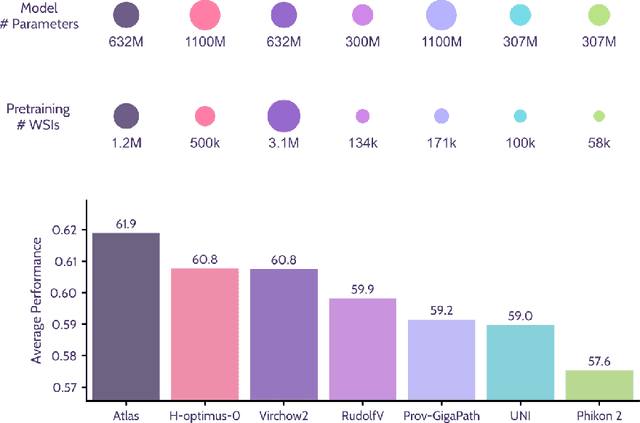
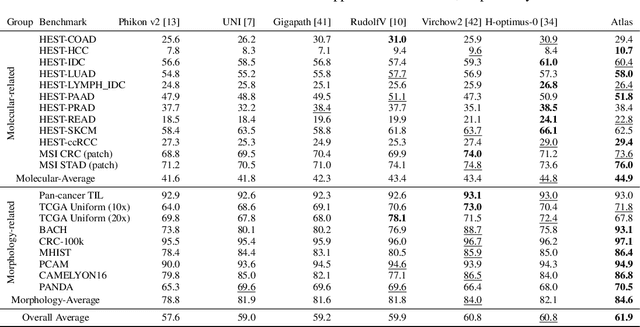
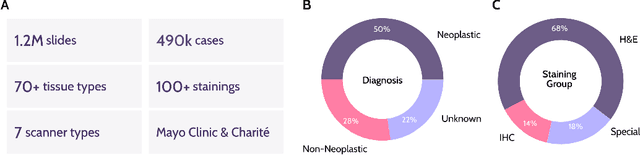
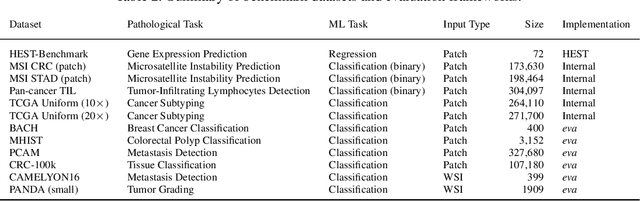
Recent advances in digital pathology have demonstrated the effectiveness of foundation models across diverse applications. In this report, we present Atlas, a novel vision foundation model based on the RudolfV approach. Our model was trained on a dataset comprising 1.2 million histopathology whole slide images, collected from two medical institutions: Mayo Clinic and Charit\'e - Universt\"atsmedizin Berlin. Comprehensive evaluations show that Atlas achieves state-of-the-art performance across twenty-one public benchmark datasets, even though it is neither the largest model by parameter count nor by training dataset size.
Characterizing Generalization under Out-Of-Distribution Shifts in Deep Metric Learning
Jul 20, 2021
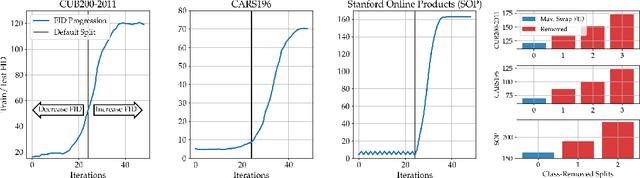
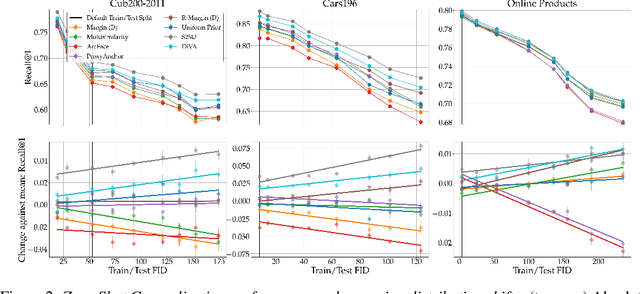
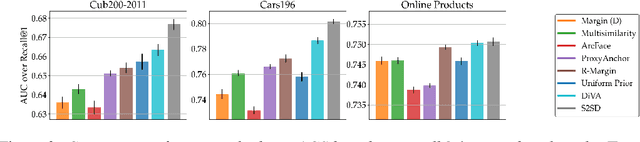
Deep Metric Learning (DML) aims to find representations suitable for zero-shot transfer to a priori unknown test distributions. However, common evaluation protocols only test a single, fixed data split in which train and test classes are assigned randomly. More realistic evaluations should consider a broad spectrum of distribution shifts with potentially varying degree and difficulty. In this work, we systematically construct train-test splits of increasing difficulty and present the ooDML benchmark to characterize generalization under out-of-distribution shifts in DML. ooDML is designed to probe the generalization performance on much more challenging, diverse train-to-test distribution shifts. Based on our new benchmark, we conduct a thorough empirical analysis of state-of-the-art DML methods. We find that while generalization tends to consistently degrade with difficulty, some methods are better at retaining performance as the distribution shift increases. Finally, we propose few-shot DML as an efficient way to consistently improve generalization in response to unknown test shifts presented in ooDML. Code available here: https://github.com/Confusezius/Characterizing_Generalization_in_DeepMetricLearning.
iPOKE: Poking a Still Image for Controlled Stochastic Video Synthesis
Jul 06, 2021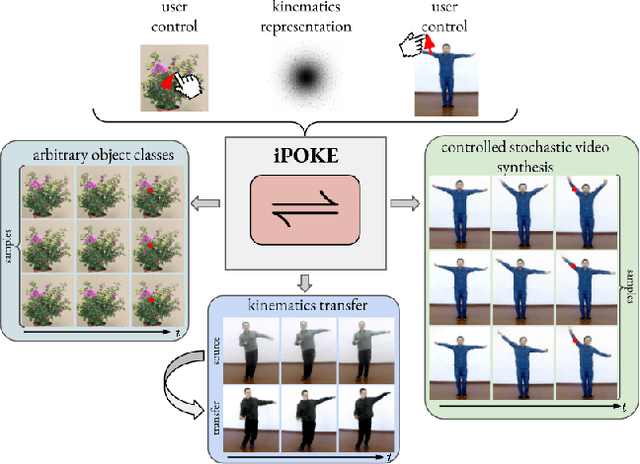
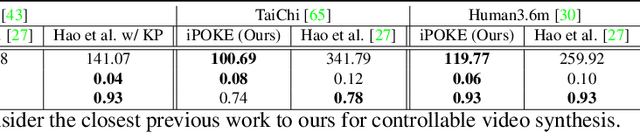
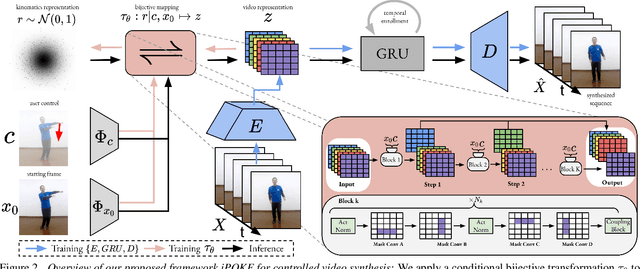

How would a static scene react to a local poke? What are the effects on other parts of an object if you could locally push it? There will be distinctive movement, despite evident variations caused by the stochastic nature of our world. These outcomes are governed by the characteristic kinematics of objects that dictate their overall motion caused by a local interaction. Conversely, the movement of an object provides crucial information about its underlying distinctive kinematics and the interdependencies between its parts. This two-way relation motivates learning a bijective mapping between object kinematics and plausible future image sequences. Therefore, we propose iPOKE - invertible Prediction of Object Kinematics - that, conditioned on an initial frame and a local poke, allows to sample object kinematics and establishes a one-to-one correspondence to the corresponding plausible videos, thereby providing a controlled stochastic video synthesis. In contrast to previous works, we do not generate arbitrary realistic videos, but provide efficient control of movements, while still capturing the stochastic nature of our environment and the diversity of plausible outcomes it entails. Moreover, our approach can transfer kinematics onto novel object instances and is not confined to particular object classes. Project page is available at https://bit.ly/3dJN4Lf
Understanding Object Dynamics for Interactive Image-to-Video Synthesis
Jun 21, 2021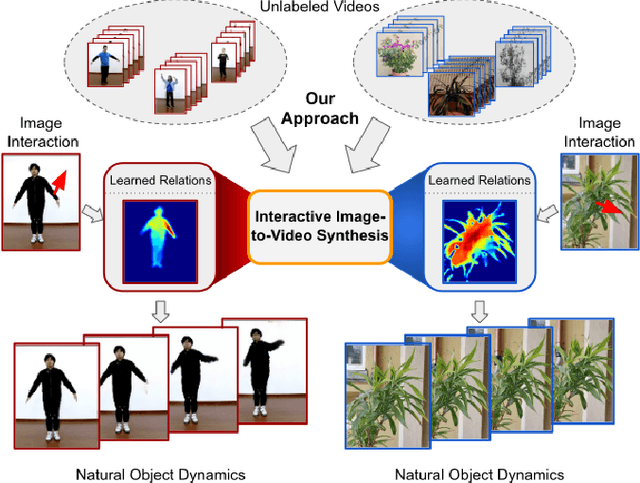

What would be the effect of locally poking a static scene? We present an approach that learns naturally-looking global articulations caused by a local manipulation at a pixel level. Training requires only videos of moving objects but no information of the underlying manipulation of the physical scene. Our generative model learns to infer natural object dynamics as a response to user interaction and learns about the interrelations between different object body regions. Given a static image of an object and a local poking of a pixel, the approach then predicts how the object would deform over time. In contrast to existing work on video prediction, we do not synthesize arbitrary realistic videos but enable local interactive control of the deformation. Our model is not restricted to particular object categories and can transfer dynamics onto novel unseen object instances. Extensive experiments on diverse objects demonstrate the effectiveness of our approach compared to common video prediction frameworks. Project page is available at https://bit.ly/3cxfA2L .
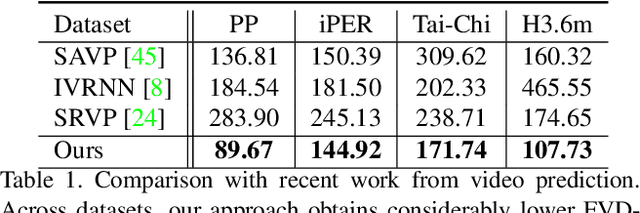
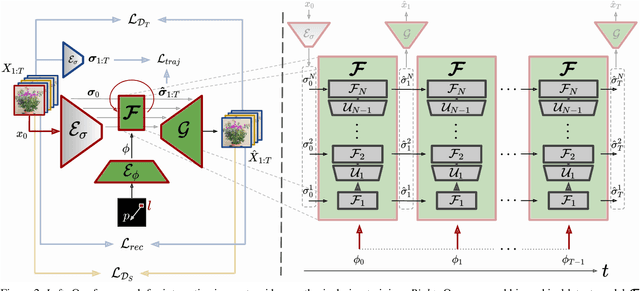
Stochastic Image-to-Video Synthesis using cINNs
May 10, 2021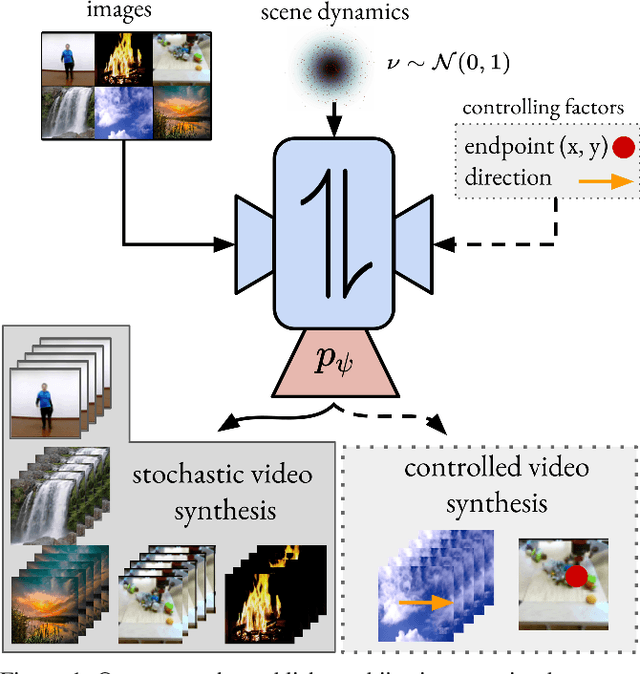
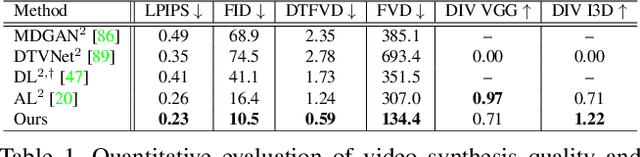
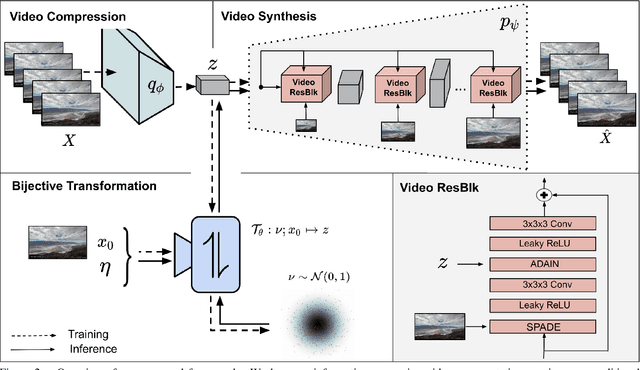
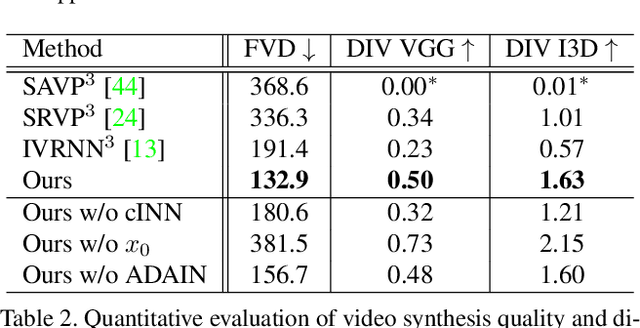
Video understanding calls for a model to learn the characteristic interplay between static scene content and its dynamics: Given an image, the model must be able to predict a future progression of the portrayed scene and, conversely, a video should be explained in terms of its static image content and all the remaining characteristics not present in the initial frame. This naturally suggests a bijective mapping between the video domain and the static content as well as residual information. In contrast to common stochastic image-to-video synthesis, such a model does not merely generate arbitrary videos progressing the initial image. Given this image, it rather provides a one-to-one mapping between the residual vectors and the video with stochastic outcomes when sampling. The approach is naturally implemented using a conditional invertible neural network (cINN) that can explain videos by independently modelling static and other video characteristics, thus laying the basis for controlled video synthesis. Experiments on four diverse video datasets demonstrate the effectiveness of our approach in terms of both the quality and diversity of the synthesized results. Our project page is available at https://bit.ly/3t66bnU.
Behavior-Driven Synthesis of Human Dynamics
Mar 08, 2021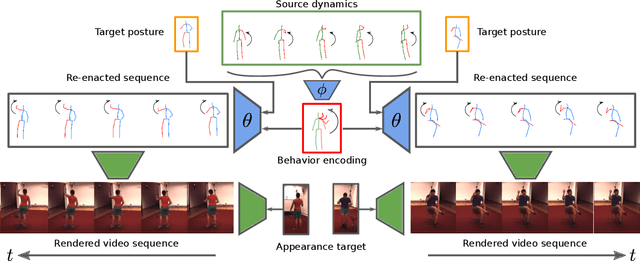

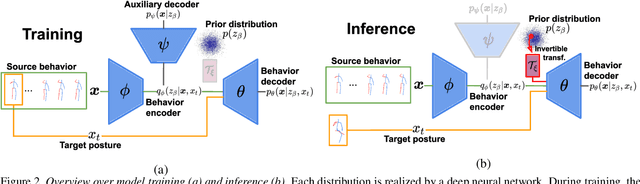
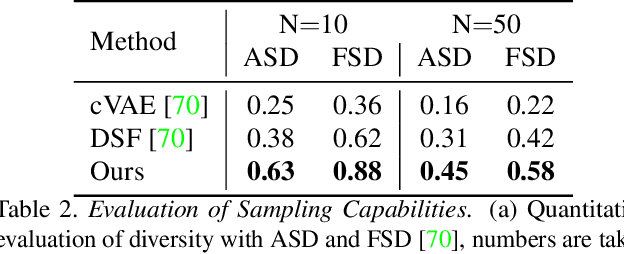
Generating and representing human behavior are of major importance for various computer vision applications. Commonly, human video synthesis represents behavior as sequences of postures while directly predicting their likely progressions or merely changing the appearance of the depicted persons, thus not being able to exercise control over their actual behavior during the synthesis process. In contrast, controlled behavior synthesis and transfer across individuals requires a deep understanding of body dynamics and calls for a representation of behavior that is independent of appearance and also of specific postures. In this work, we present a model for human behavior synthesis which learns a dedicated representation of human dynamics independent of postures. Using this representation, we are able to change the behavior of a person depicted in an arbitrary posture, or to even directly transfer behavior observed in a given video sequence. To this end, we propose a conditional variational framework which explicitly disentangles posture from behavior. We demonstrate the effectiveness of our approach on this novel task, evaluating capturing, transferring, and sampling fine-grained, diverse behavior, both quantitatively and qualitatively. Project page is available at https://cutt.ly/5l7rXEp
S2SD: Simultaneous Similarity-based Self-Distillation for Deep Metric Learning
Oct 01, 2020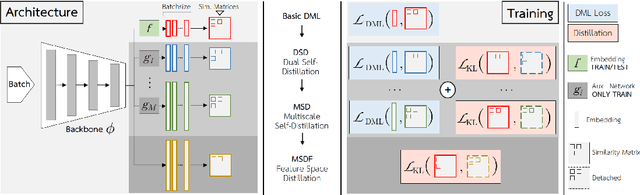
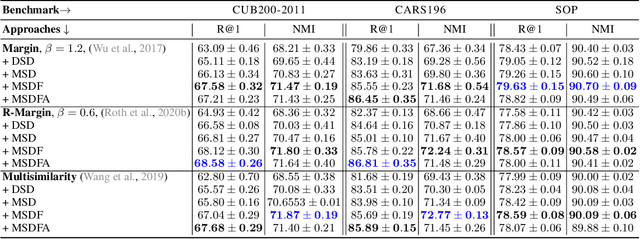
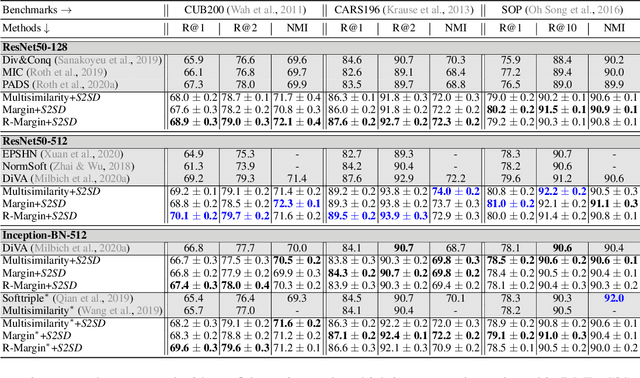
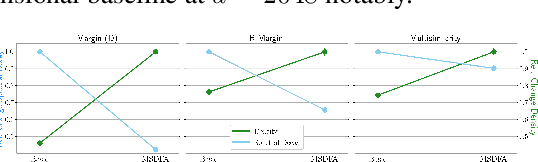
Deep Metric Learning (DML) provides a crucial tool for visual similarity and zero-shot retrieval applications by learning generalizing embedding spaces, although recent work in DML has shown strong performance saturation across training objectives. However, generalization capacity is known to scale with the embedding space dimensionality. Unfortunately, high dimensional embeddings also create higher retrieval cost for downstream applications. To remedy this, we propose S2SD - Simultaneous Similarity-based Self-distillation. S2SD extends DML with knowledge distillation from auxiliary, high-dimensional embedding and feature spaces to leverage complementary context during training while retaining test-time cost and with negligible changes to the training time. Experiments and ablations across different objectives and standard benchmarks show S2SD offering notable improvements of up to 7% in Recall@1, while also setting a new state-of-the-art. Code available at https://github.com/MLforHealth/S2SD.
DiVA: Diverse Visual Feature Aggregation for Deep Metric Learning
Apr 29, 2020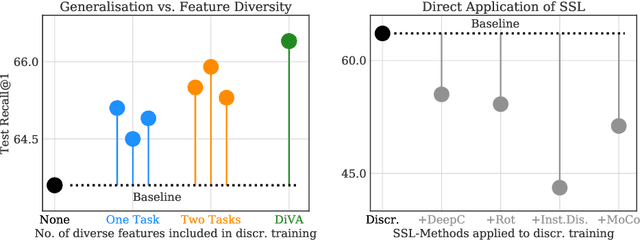

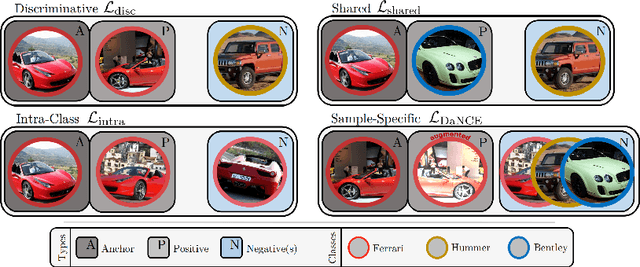
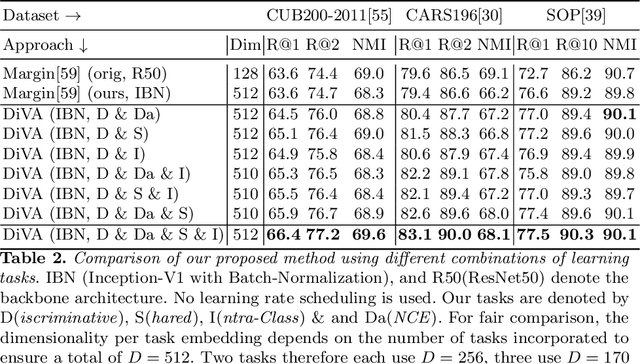
Visual Similarity plays an important role in many computer vision applications. Deep metric learning (DML) is a powerful framework for learning such similarities which not only generalize from training data to identically distributed test distributions, but in particular also translate to unknown test classes. However, its prevailing learning paradigm is class-discriminative supervised training, which typically results in representations specialized in separating training classes. For effective generalization, however, such an image representation needs to capture a diverse range of data characteristics. To this end, we propose and study multiple complementary learning tasks, targeting conceptually different data relationships by only resorting to the available training samples and labels of a standard DML setting. Through simultaneous optimization of our tasks we learn a single model to aggregate their training signals, resulting in strong generalization and state-of-the-art performance on multiple established DML benchmark datasets.