 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMULDE: Multiscale Log-Density Estimation via Denoising Score Matching for Video Anomaly Detection
Mar 21, 2024



We propose a novel approach to video anomaly detection: we treat feature vectors extracted from videos as realizations of a random variable with a fixed distribution and model this distribution with a neural network. This lets us estimate the likelihood of test videos and detect video anomalies by thresholding the likelihood estimates. We train our video anomaly detector using a modification of denoising score matching, a method that injects training data with noise to facilitate modeling its distribution. To eliminate hyperparameter selection, we model the distribution of noisy video features across a range of noise levels and introduce a regularizer that tends to align the models for different levels of noise. At test time, we combine anomaly indications at multiple noise scales with a Gaussian mixture model. Running our video anomaly detector induces minimal delays as inference requires merely extracting the features and forward-propagating them through a shallow neural network and a Gaussian mixture model. Our experiments on five popular video anomaly detection benchmarks demonstrate state-of-the-art performance, both in the object-centric and in the frame-centric setup.
Meta-Prompting for Automating Zero-shot Visual Recognition with LLMs
Mar 19, 2024Prompt ensembling of Large Language Model (LLM) generated category-specific prompts has emerged as an effective method to enhance zero-shot recognition ability of Vision-Language Models (VLMs). To obtain these category-specific prompts, the present methods rely on hand-crafting the prompts to the LLMs for generating VLM prompts for the downstream tasks. However, this requires manually composing these task-specific prompts and still, they might not cover the diverse set of visual concepts and task-specific styles associated with the categories of interest. To effectively take humans out of the loop and completely automate the prompt generation process for zero-shot recognition, we propose Meta-Prompting for Visual Recognition (MPVR). Taking as input only minimal information about the target task, in the form of its short natural language description, and a list of associated class labels, MPVR automatically produces a diverse set of category-specific prompts resulting in a strong zero-shot classifier. MPVR generalizes effectively across various popular zero-shot image recognition benchmarks belonging to widely different domains when tested with multiple LLMs and VLMs. For example, MPVR obtains a zero-shot recognition improvement over CLIP by up to 19.8% and 18.2% (5.0% and 4.5% on average over 20 datasets) leveraging GPT and Mixtral LLMs, respectively
Sit Back and Relax: Learning to Drive Incrementally in All Weather Conditions
May 30, 2023



In autonomous driving scenarios, current object detection models show strong performance when tested in clear weather. However, their performance deteriorates significantly when tested in degrading weather conditions. In addition, even when adapted to perform robustly in a sequence of different weather conditions, they are often unable to perform well in all of them and suffer from catastrophic forgetting. To efficiently mitigate forgetting, we propose Domain-Incremental Learning through Activation Matching (DILAM), which employs unsupervised feature alignment to adapt only the affine parameters of a clear weather pre-trained network to different weather conditions. We propose to store these affine parameters as a memory bank for each weather condition and plug-in their weather-specific parameters during driving (i.e. test time) when the respective weather conditions are encountered. Our memory bank is extremely lightweight, since affine parameters account for less than 2% of a typical object detector. Furthermore, contrary to previous domain-incremental learning approaches, we do not require the weather label when testing and propose to automatically infer the weather condition by a majority voting linear classifier.
The Norm Must Go On: Dynamic Unsupervised Domain Adaptation by Normalization
Dec 01, 2021

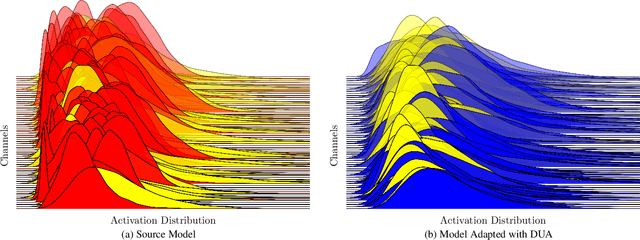

Domain adaptation is crucial to adapt a learned model to new scenarios, such as domain shifts or changing data distributions. Current approaches usually require a large amount of labeled or unlabeled data from the shifted domain. This can be a hurdle in fields which require continuous dynamic adaptation or suffer from scarcity of data, e.g. autonomous driving in challenging weather conditions. To address this problem of continuous adaptation to distribution shifts, we propose Dynamic Unsupervised Adaptation (DUA). We modify the feature representations of the model by continuously adapting the statistics of the batch normalization layers. We show that by accessing only a tiny fraction of unlabeled data from the shifted domain and adapting sequentially, a strong performance gain can be achieved. With even less than 1% of unlabeled data from the target domain, DUA already achieves competitive results to strong baselines. In addition, the computational overhead is minimal in contrast to previous approaches. Our approach is simple, yet effective and can be applied to any architecture which uses batch normalization as one of its components. We show the utility of DUA by evaluating it on a variety of domain adaptation datasets and tasks including object recognition, digit recognition and object detection.