 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGandalf the Red: Adaptive Security for LLMs
Jan 14, 2025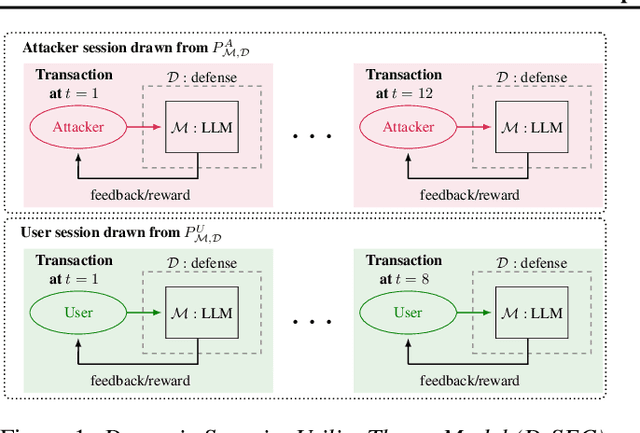
Current evaluations of defenses against prompt attacks in large language model (LLM) applications often overlook two critical factors: the dynamic nature of adversarial behavior and the usability penalties imposed on legitimate users by restrictive defenses. We propose D-SEC (Dynamic Security Utility Threat Model), which explicitly separates attackers from legitimate users, models multi-step interactions, and rigorously expresses the security-utility in an optimizable form. We further address the shortcomings in existing evaluations by introducing Gandalf, a crowd-sourced, gamified red-teaming platform designed to generate realistic, adaptive attack datasets. Using Gandalf, we collect and release a dataset of 279k prompt attacks. Complemented by benign user data, our analysis reveals the interplay between security and utility, showing that defenses integrated in the LLM (e.g., system prompts) can degrade usability even without blocking requests. We demonstrate that restricted application domains, defense-in-depth, and adaptive defenses are effective strategies for building secure and useful LLM applications. Code is available at \href{https://github.com/lakeraai/dsec-gandalf}{\texttt{https://github.com/lakeraai/dsec-gandalf}}.
Hierarchical Imitation Learning for Stochastic Environments
Sep 25, 2023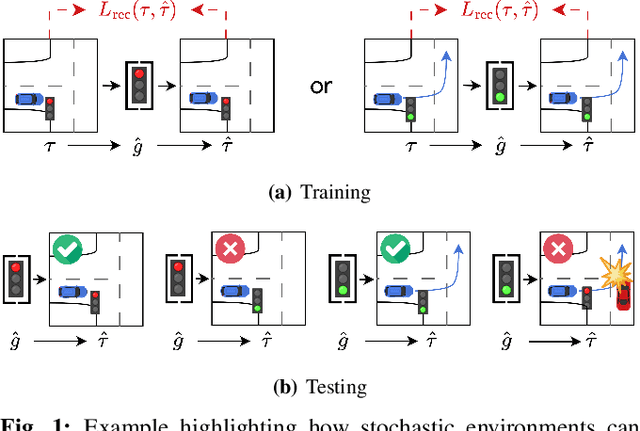
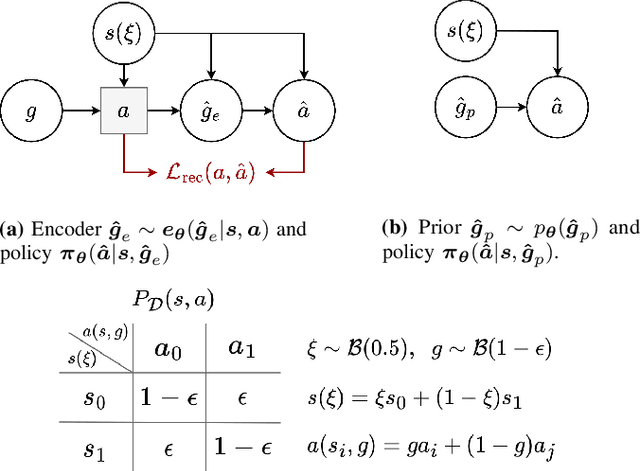
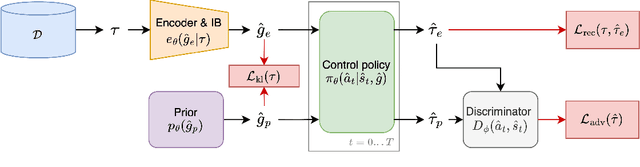
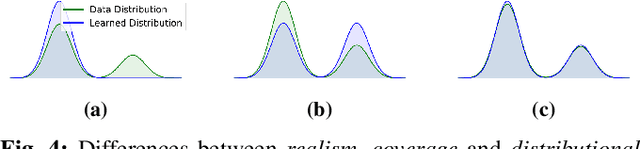
Many applications of imitation learning require the agent to generate the full distribution of behaviour observed in the training data. For example, to evaluate the safety of autonomous vehicles in simulation, accurate and diverse behaviour models of other road users are paramount. Existing methods that improve this distributional realism typically rely on hierarchical policies. These condition the policy on types such as goals or personas that give rise to multi-modal behaviour. However, such methods are often inappropriate for stochastic environments where the agent must also react to external factors: because agent types are inferred from the observed future trajectory during training, these environments require that the contributions of internal and external factors to the agent behaviour are disentangled and only internal factors, i.e., those under the agent's control, are encoded in the type. Encoding future information about external factors leads to inappropriate agent reactions during testing, when the future is unknown and types must be drawn independently from the actual future. We formalize this challenge as distribution shift in the conditional distribution of agent types under environmental stochasticity. We propose Robust Type Conditioning (RTC), which eliminates this shift with adversarial training under randomly sampled types. Experiments on two domains, including the large-scale Waymo Open Motion Dataset, show improved distributional realism while maintaining or improving task performance compared to state-of-the-art baselines.
Symphony: Learning Realistic and Diverse Agents for Autonomous Driving Simulation
May 06, 2022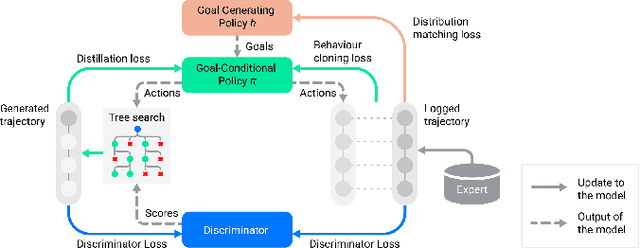
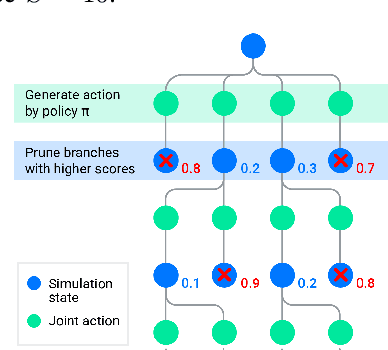
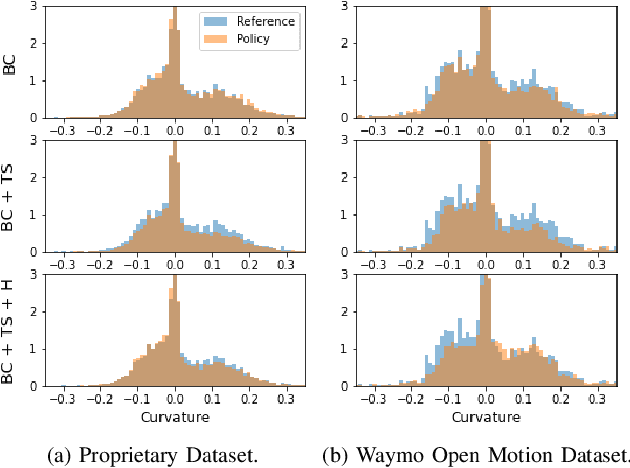
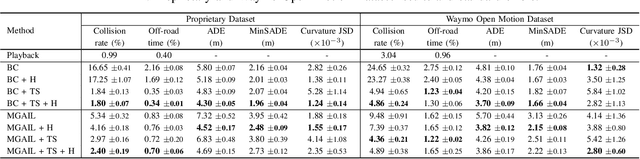
Simulation is a crucial tool for accelerating the development of autonomous vehicles. Making simulation realistic requires models of the human road users who interact with such cars. Such models can be obtained by applying learning from demonstration (LfD) to trajectories observed by cars already on the road. However, existing LfD methods are typically insufficient, yielding policies that frequently collide or drive off the road. To address this problem, we propose Symphony, which greatly improves realism by combining conventional policies with a parallel beam search. The beam search refines these policies on the fly by pruning branches that are unfavourably evaluated by a discriminator. However, it can also harm diversity, i.e., how well the agents cover the entire distribution of realistic behaviour, as pruning can encourage mode collapse. Symphony addresses this issue with a hierarchical approach, factoring agent behaviour into goal generation and goal conditioning. The use of such goals ensures that agent diversity neither disappears during adversarial training nor is pruned away by the beam search. Experiments on both proprietary and open Waymo datasets confirm that Symphony agents learn more realistic and diverse behaviour than several baselines.
VariBAD: A Very Good Method for Bayes-Adaptive Deep RL via Meta-Learning
Oct 18, 2019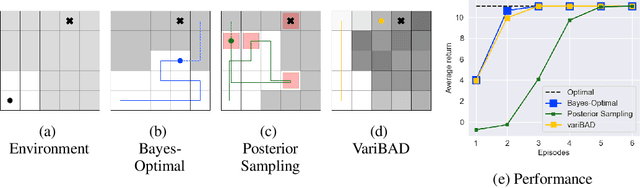
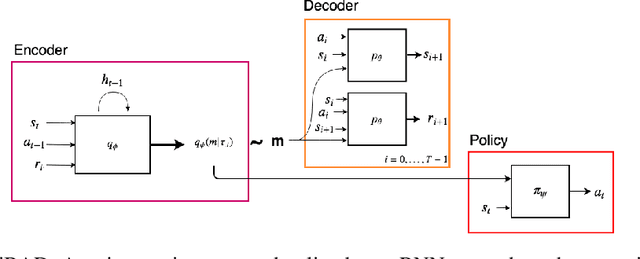
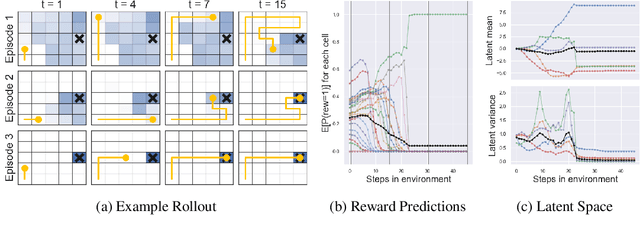
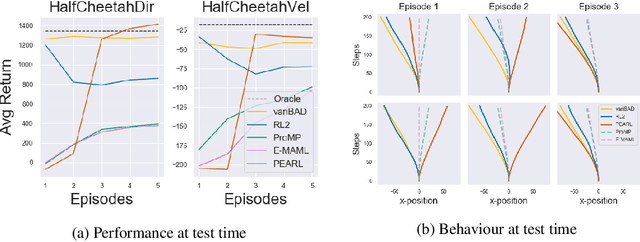
Trading off exploration and exploitation in an unknown environment is key to maximising expected return during learning. A Bayes-optimal policy, which does so optimally, conditions its actions not only on the environment state but on the agent's uncertainty about the environment. Computing a Bayes-optimal policy is however intractable for all but the smallest tasks. In this paper, we introduce variational Bayes-Adaptive Deep RL (variBAD), a way to meta-learn to perform approximate inference in an unknown environment, and incorporate task uncertainty directly during action selection. In a grid-world domain, we illustrate how variBAD performs structured online exploration as a function of task uncertainty. We also evaluate variBAD on MuJoCo domains widely used in meta-RL and show that it achieves higher return during training than existing methods.
Learning from Demonstration in the Wild
Nov 08, 2018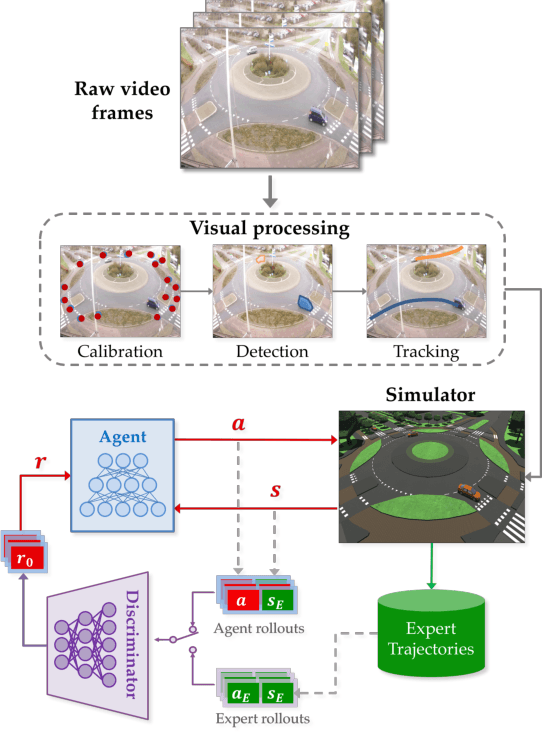
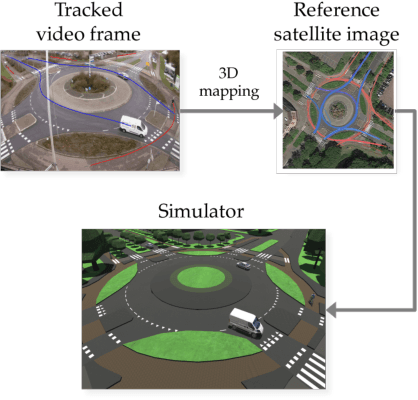
Learning from demonstration (LfD) is useful in settings where hand-coding behaviour or a reward function is impractical. It has succeeded in a wide range of problems but typically relies on artificially generated demonstrations or specially deployed sensors and has not generally been able to leverage the copious demonstrations available in the wild: those that capture behaviour that was occurring anyway using sensors that were already deployed for another purpose, e.g., traffic camera footage capturing demonstrations of natural behaviour of vehicles, cyclists, and pedestrians. We propose video to behaviour (ViBe), a new approach to learning models of road user behaviour that requires as input only unlabelled raw video data of a traffic scene collected from a single, monocular, uncalibrated camera with ordinary resolution. Our approach calibrates the camera, detects relevant objects, tracks them through time, and uses the resulting trajectories to perform LfD, yielding models of naturalistic behaviour. We apply ViBe to raw videos of a traffic intersection and show that it can learn purely from videos, without additional expert knowledge.
CAML: Fast Context Adaptation via Meta-Learning
Oct 12, 2018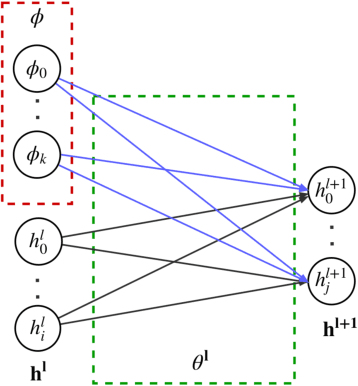

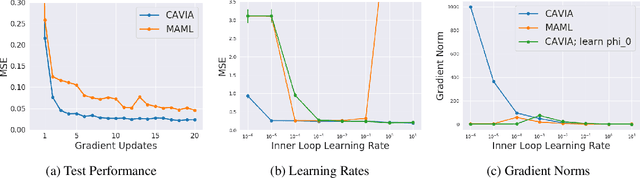
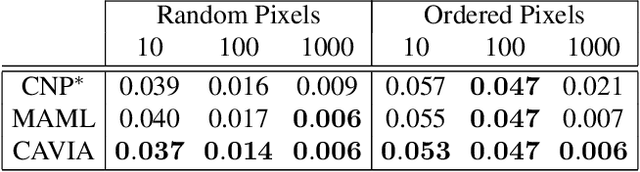
We propose CAML, a meta-learning method for fast adaptation that partitions the model parameters into two parts: context parameters that serve as additional input to the model and are adapted on individual tasks, and shared parameters that are meta-trained and shared across tasks. At test time, the context parameters are updated with one or several gradient steps on a task-specific loss that is backpropagated through the shared part of the network. Compared to approaches that adjust all parameters on a new task (e.g., MAML), our method can be scaled up to larger networks without overfitting on a single task, is easier to implement, and saves memory writes during training and network communication at test time for distributed machine learning systems. We show empirically that this approach outperforms MAML, is less sensitive to the task-specific learning rate, can capture meaningful task embeddings with the context parameters, and outperforms alternative partitionings of the parameter vectors.
TACO: Learning Task Decomposition via Temporal Alignment for Control
Aug 10, 2018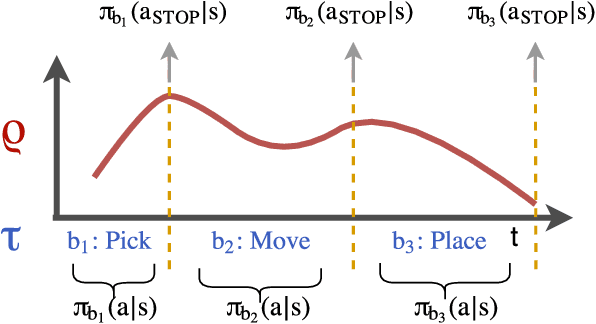
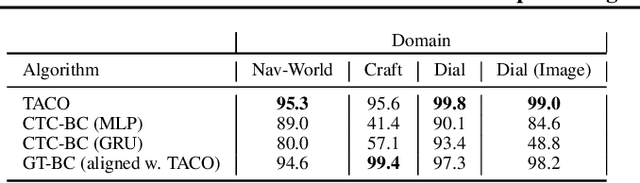
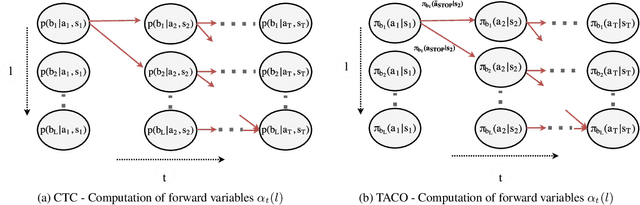
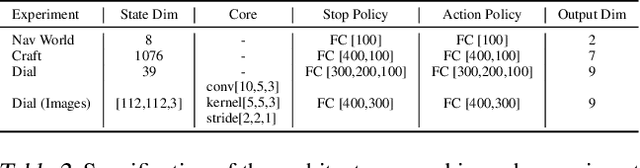
Many advanced Learning from Demonstration (LfD) methods consider the decomposition of complex, real-world tasks into simpler sub-tasks. By reusing the corresponding sub-policies within and between tasks, they provide training data for each policy from different high-level tasks and compose them to perform novel ones. Existing approaches to modular LfD focus either on learning a single high-level task or depend on domain knowledge and temporal segmentation. In contrast, we propose a weakly supervised, domain-agnostic approach based on task sketches, which include only the sequence of sub-tasks performed in each demonstration. Our approach simultaneously aligns the sketches with the observed demonstrations and learns the required sub-policies. This improves generalisation in comparison to separate optimisation procedures. We evaluate the approach on multiple domains, including a simulated 3D robot arm control task using purely image-based observations. The results show that our approach performs commensurately with fully supervised approaches, while requiring significantly less annotation effort.