 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeISEE.U: Distributed online active target localization with unpredictable targets
Oct 17, 2022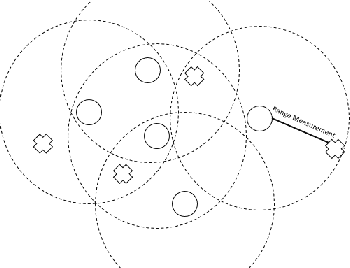
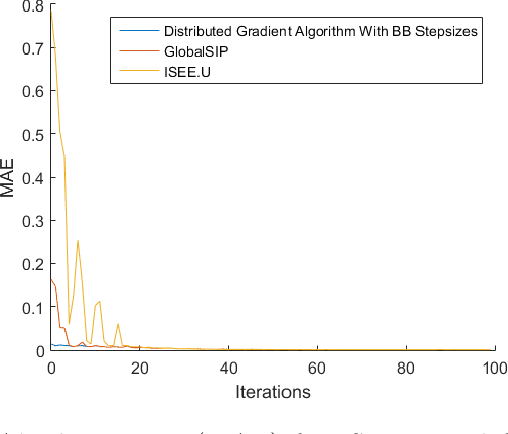
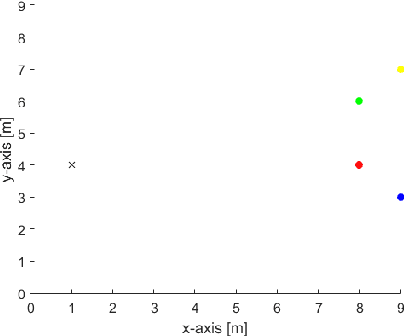
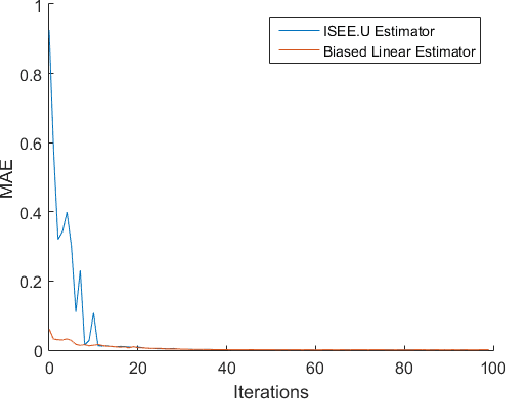
This paper addresses target localization with an online active learning algorithm defined by distributed, simple and fast computations at each node, with no parameters to tune and where the estimate of the target position at each agent is asymptotically equal in expectation to the centralized maximum-likelihood estimator. ISEE.U takes noisy distances at each agent and finds a control that maximizes localization accuracy. We do not assume specific target dynamics and, thus, our method is robust when facing unpredictable targets. Each agent computes the control that maximizes overall target position accuracy via a local estimate of the Fisher Information Matrix. We compared the proposed method with a state of the art algorithm outperforming it when the target movements do not follow a prescribed trajectory, with x100 less computation time, even when our method is running in one central CPU.
STRONG: Synchronous and asynchronous RObust Network localization, under Non-Gaussian noise
Oct 01, 2021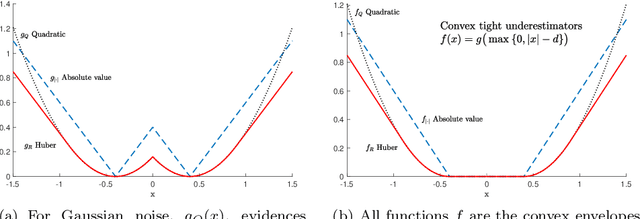
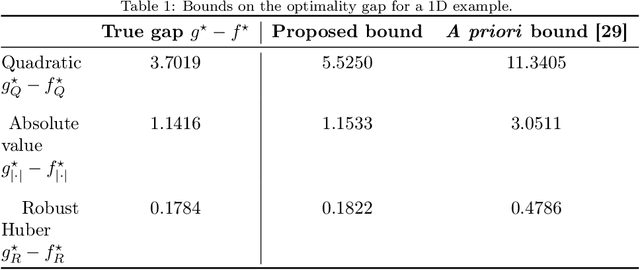
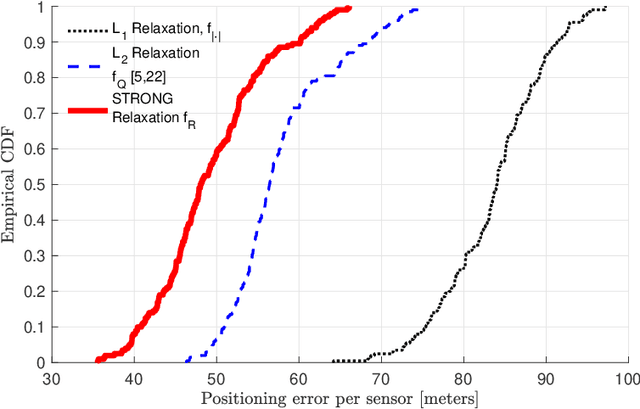
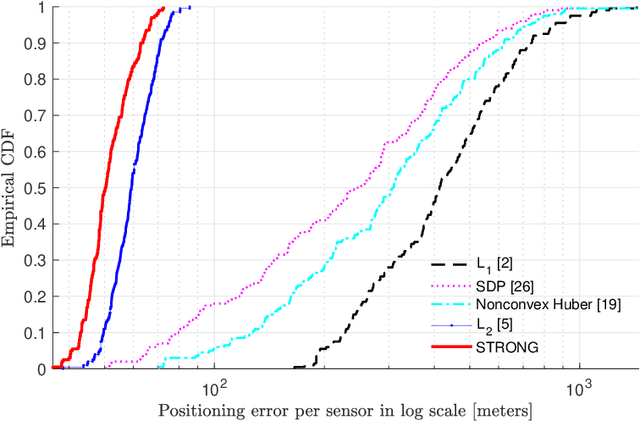
Real-world network applications must cope with failing nodes, malicious attacks, or nodes facing corrupted data - data classified as outliers. Our work addresses these concerns in the scope of the sensor network localization problem where, despite the abundance of technical literature, prior research seldom considered outlier data. We propose robust, fast, and distributed network localization algorithms, resilient to high-power noise, but also precise under regular Gaussian noise. We use a Huber M-estimator, thus obtaining a robust (but nonconvex) optimization problem. We convexify and change the problem representation, to allow for distributed robust localization algorithms: a synchronous distributed method that has optimal convergence rate and an asynchronous one with proven convergence guarantees. A major highlight of our contribution lies on the fact that we pay no price for provable distributed computation neither in accuracy, nor in communication cost or convergence speed. Simulations showcase the superior performance of our algorithms, both in the presence of outliers and under regular Gaussian noise: our method exceeds the accuracy of alternative approaches, distributed and centralized, even under heavy additive and multiplicative outlier noise.
* arXiv admin note: substantial text overlap with arXiv:1610.09020
CvxPnPL: A Unified Convex Solution to the Absolute Pose Estimation Problem from Point and Line Correspondences
Aug 09, 2019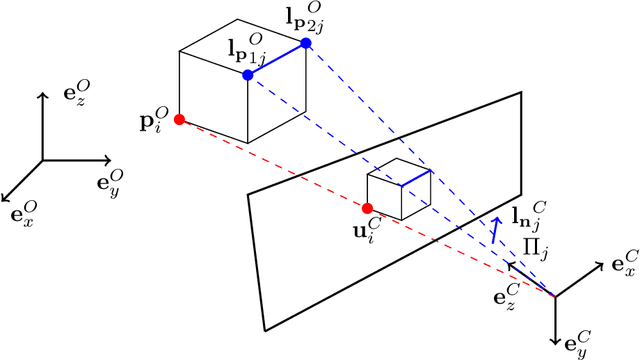
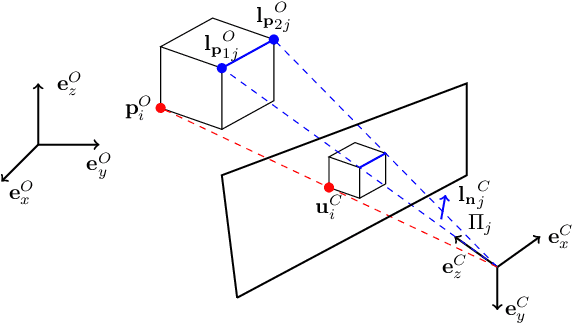

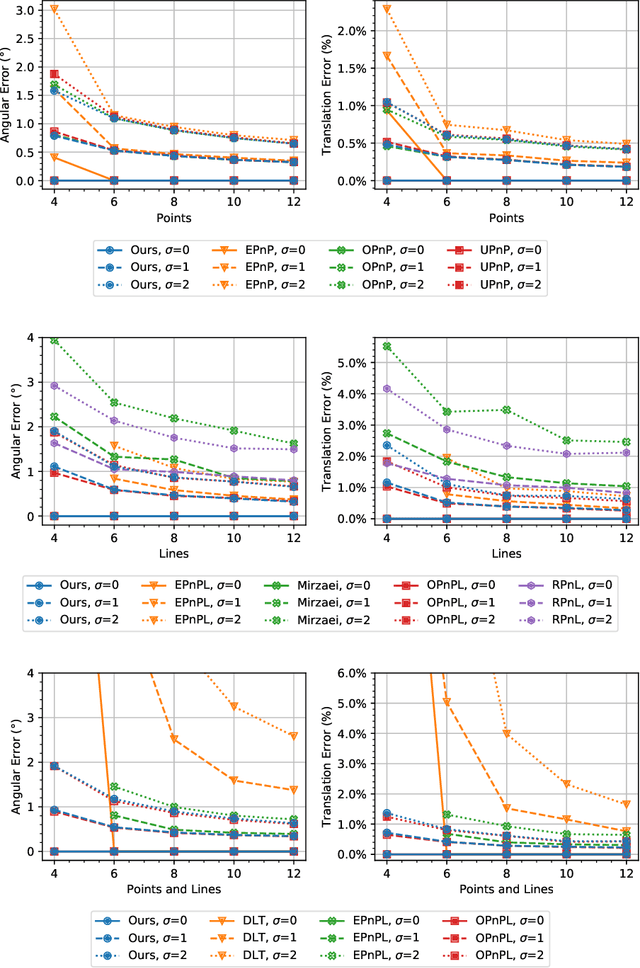
We present a new convex method to estimate 3D pose from mixed combinations of 2D-3D point and line correspondences, the Perspective-n-Points-and-Lines problem (PnPL). We merge the contributions of each point and line into a unified Quadratic Constrained Quadratic Problem (QCQP) and then relax it into a Semi Definite Program (SDP) through Shor's relaxation. This makes it possible to gracefully handle mixed configurations of points and lines. Furthermore, the proposed relaxation allows us to recover a finite number of solutions under ambiguous configurations. In such cases, the 3D pose candidates are found by further enforcing geometric constraints on the solution space and then retrieving such poses from the intersections of multiple quadrics. Experiments provide results in line with the best performing state of the art methods while providing the flexibility of solving for an arbitrary number of points and lines.
Learning from Demonstration in the Wild
Nov 08, 2018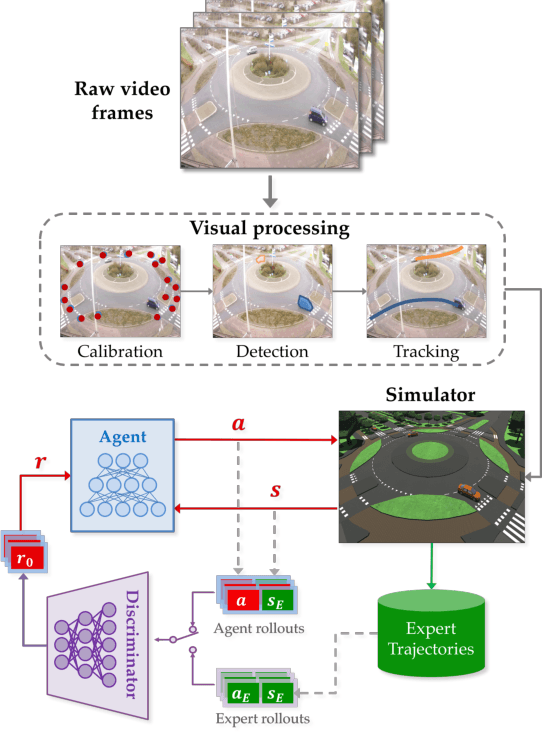
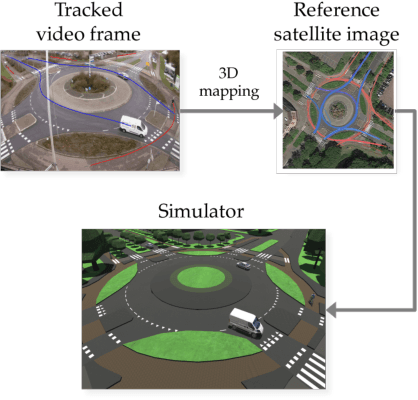
Learning from demonstration (LfD) is useful in settings where hand-coding behaviour or a reward function is impractical. It has succeeded in a wide range of problems but typically relies on artificially generated demonstrations or specially deployed sensors and has not generally been able to leverage the copious demonstrations available in the wild: those that capture behaviour that was occurring anyway using sensors that were already deployed for another purpose, e.g., traffic camera footage capturing demonstrations of natural behaviour of vehicles, cyclists, and pedestrians. We propose video to behaviour (ViBe), a new approach to learning models of road user behaviour that requires as input only unlabelled raw video data of a traffic scene collected from a single, monocular, uncalibrated camera with ordinary resolution. Our approach calibrates the camera, detects relevant objects, tracks them through time, and uses the resulting trajectories to perform LfD, yielding models of naturalistic behaviour. We apply ViBe to raw videos of a traffic intersection and show that it can learn purely from videos, without additional expert knowledge.
LocDyn: Robust Distributed Localization for Mobile Underwater Networks
Jan 27, 2017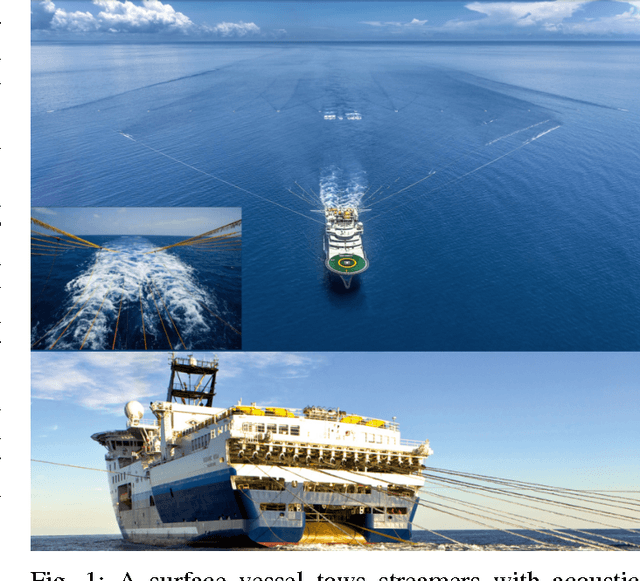
How to self-localize large teams of underwater nodes using only noisy range measurements? How to do it in a distributed way, and incorporating dynamics into the problem? How to reject outliers and produce trustworthy position estimates? The stringent acoustic communication channel and the accuracy needs of our geophysical survey application demand faster and more accurate localization methods. We approach dynamic localization as a MAP estimation problem where the prior encodes dynamics, and we devise a convex relaxation method that takes advantage of previous estimates at each measurement acquisition step; The algorithm converges at an optimal rate for first order methods. LocDyn is distributed: there is no fusion center responsible for processing acquired data and the same simple computations are performed for each node. LocDyn is accurate: experiments attest to a smaller positioning error than a comparable Kalman filter. LocDyn is robust: it rejects outlier noise, while the comparing methods succumb in terms of positioning error.