 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVGG-T$^3$: Offline Feed-Forward 3D Reconstruction at Scale
Feb 26, 2026We present a scalable 3D reconstruction model that addresses a critical limitation in offline feed-forward methods: their computational and memory requirements grow quadratically w.r.t. the number of input images. Our approach is built on the key insight that this bottleneck stems from the varying-length Key-Value (KV) space representation of scene geometry, which we distill into a fixed-size Multi-Layer Perceptron (MLP) via test-time training. VGG-T$^3$ (Visual Geometry Grounded Test Time Training) scales linearly w.r.t. the number of input views, similar to online models, and reconstructs a $1k$ image collection in just $54$ seconds, achieving a $11.6\times$ speed-up over baselines that rely on softmax attention. Since our method retains global scene aggregation capability, our point map reconstruction error outperforming other linear-time methods by large margins. Finally, we demonstrate visual localization capabilities of our model by querying the scene representation with unseen images.
A Guide to Structureless Visual Localization
Apr 24, 2025Visual localization algorithms, i.e., methods that estimate the camera pose of a query image in a known scene, are core components of many applications, including self-driving cars and augmented / mixed reality systems. State-of-the-art visual localization algorithms are structure-based, i.e., they store a 3D model of the scene and use 2D-3D correspondences between the query image and 3D points in the model for camera pose estimation. While such approaches are highly accurate, they are also rather inflexible when it comes to adjusting the underlying 3D model after changes in the scene. Structureless localization approaches represent the scene as a database of images with known poses and thus offer a much more flexible representation that can be easily updated by adding or removing images. Although there is a large amount of literature on structure-based approaches, there is significantly less work on structureless methods. Hence, this paper is dedicated to providing the, to the best of our knowledge, first comprehensive discussion and comparison of structureless methods. Extensive experiments show that approaches that use a higher degree of classical geometric reasoning generally achieve higher pose accuracy. In particular, approaches based on classical absolute or semi-generalized relative pose estimation outperform very recent methods based on pose regression by a wide margin. Compared with state-of-the-art structure-based approaches, the flexibility of structureless methods comes at the cost of (slightly) lower pose accuracy, indicating an interesting direction for future work.
Light3R-SfM: Towards Feed-forward Structure-from-Motion
Jan 24, 2025



We present Light3R-SfM, a feed-forward, end-to-end learnable framework for efficient large-scale Structure-from-Motion (SfM) from unconstrained image collections. Unlike existing SfM solutions that rely on costly matching and global optimization to achieve accurate 3D reconstructions, Light3R-SfM addresses this limitation through a novel latent global alignment module. This module replaces traditional global optimization with a learnable attention mechanism, effectively capturing multi-view constraints across images for robust and precise camera pose estimation. Light3R-SfM constructs a sparse scene graph via retrieval-score-guided shortest path tree to dramatically reduce memory usage and computational overhead compared to the naive approach. Extensive experiments demonstrate that Light3R-SfM achieves competitive accuracy while significantly reducing runtime, making it ideal for 3D reconstruction tasks in real-world applications with a runtime constraint. This work pioneers a data-driven, feed-forward SfM approach, paving the way toward scalable, accurate, and efficient 3D reconstruction in the wild.
(Just) A Spoonful of Refinements Helps the Registration Error Go Down
Aug 06, 2021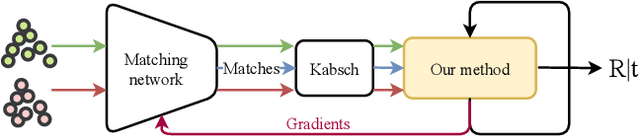
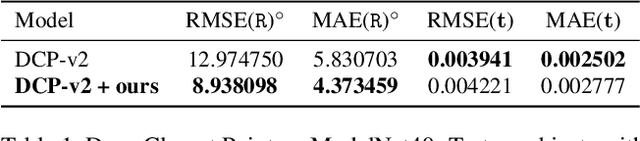

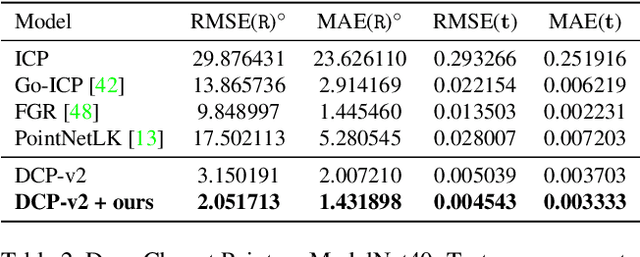
We tackle data-driven 3D point cloud registration. Given point correspondences, the standard Kabsch algorithm provides an optimal rotation estimate. This allows to train registration models in an end-to-end manner by differentiating the SVD operation. However, given the initial rotation estimate supplied by Kabsch, we show we can improve point correspondence learning during model training by extending the original optimization problem. In particular, we linearize the governing constraints of the rotation matrix and solve the resulting linear system of equations. We then iteratively produce new solutions by updating the initial estimate. Our experiments show that, by plugging our differentiable layer to existing learning-based registration methods, we improve the correspondence matching quality. This yields up to a 7% decrease in rotation error for correspondence-based data-driven registration methods.
CvxPnPL: A Unified Convex Solution to the Absolute Pose Estimation Problem from Point and Line Correspondences
Aug 09, 2019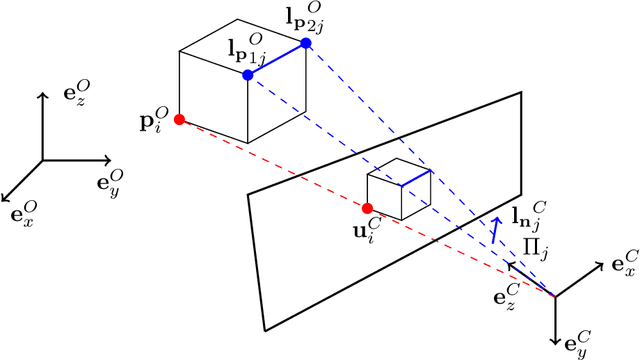
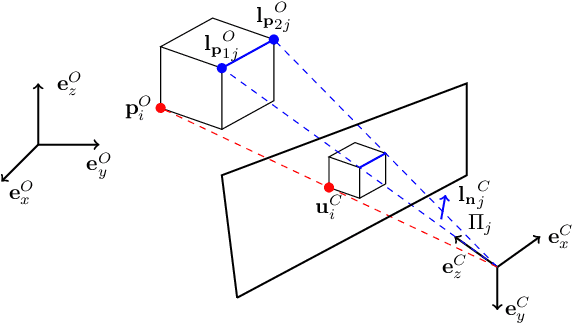

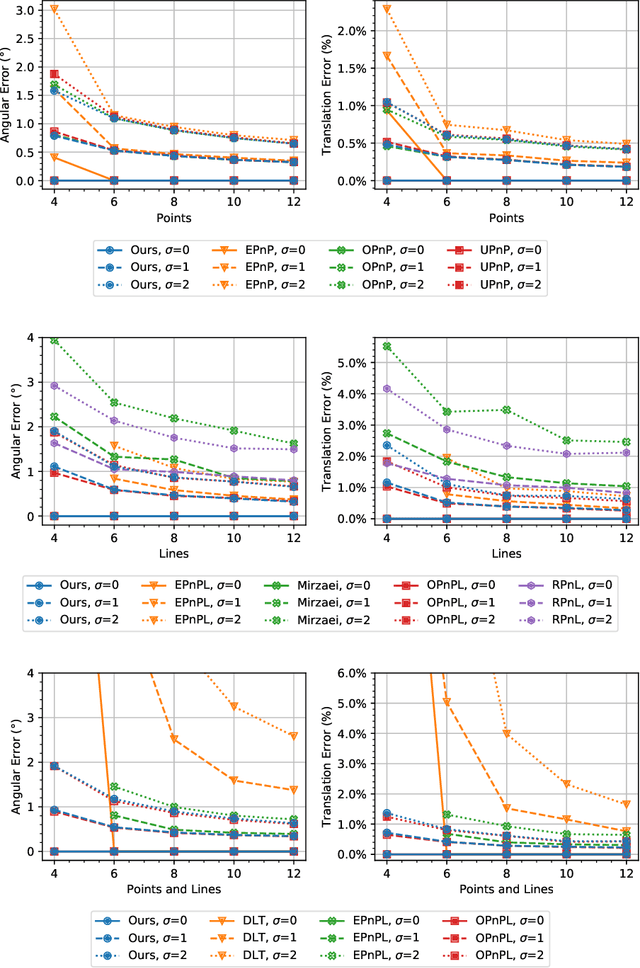
We present a new convex method to estimate 3D pose from mixed combinations of 2D-3D point and line correspondences, the Perspective-n-Points-and-Lines problem (PnPL). We merge the contributions of each point and line into a unified Quadratic Constrained Quadratic Problem (QCQP) and then relax it into a Semi Definite Program (SDP) through Shor's relaxation. This makes it possible to gracefully handle mixed configurations of points and lines. Furthermore, the proposed relaxation allows us to recover a finite number of solutions under ambiguous configurations. In such cases, the 3D pose candidates are found by further enforcing geometric constraints on the solution space and then retrieving such poses from the intersections of multiple quadrics. Experiments provide results in line with the best performing state of the art methods while providing the flexibility of solving for an arbitrary number of points and lines.