 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocDyn: Robust Distributed Localization for Mobile Underwater Networks
Paper and Code
Jan 27, 2017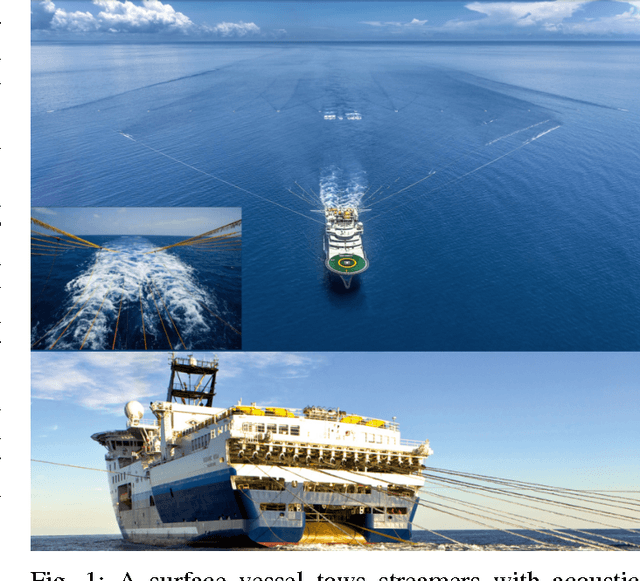
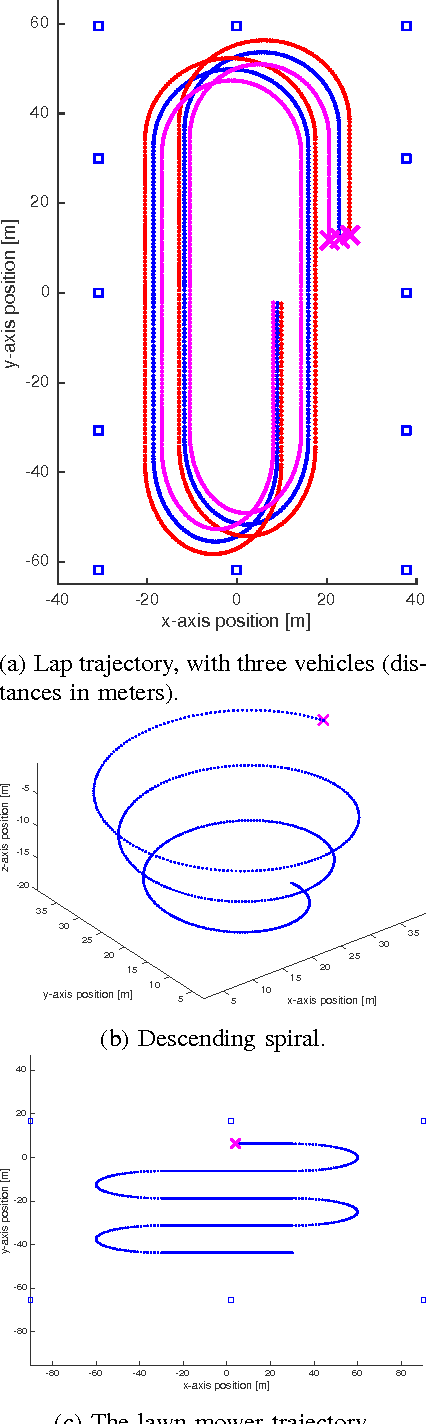
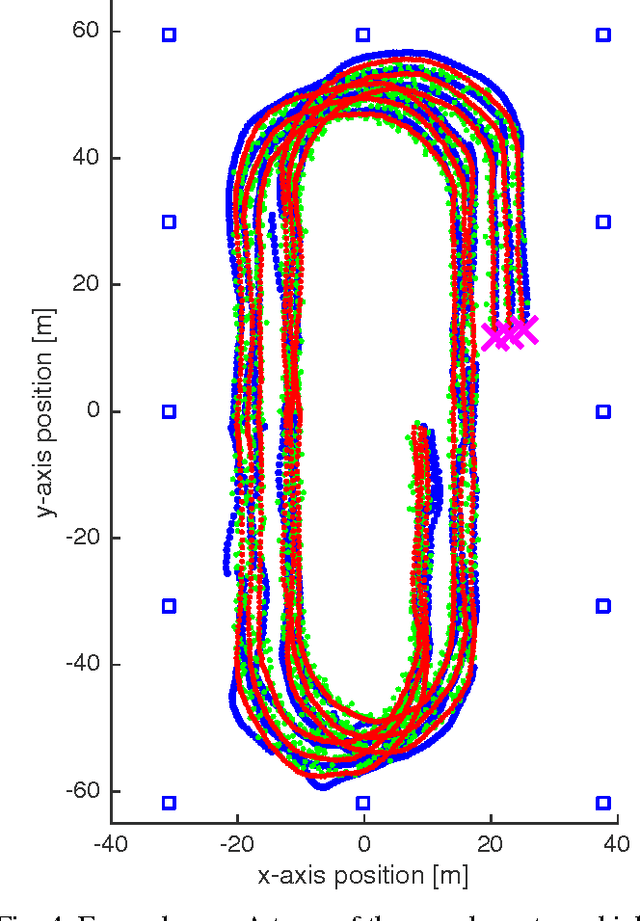
How to self-localize large teams of underwater nodes using only noisy range measurements? How to do it in a distributed way, and incorporating dynamics into the problem? How to reject outliers and produce trustworthy position estimates? The stringent acoustic communication channel and the accuracy needs of our geophysical survey application demand faster and more accurate localization methods. We approach dynamic localization as a MAP estimation problem where the prior encodes dynamics, and we devise a convex relaxation method that takes advantage of previous estimates at each measurement acquisition step; The algorithm converges at an optimal rate for first order methods. LocDyn is distributed: there is no fusion center responsible for processing acquired data and the same simple computations are performed for each node. LocDyn is accurate: experiments attest to a smaller positioning error than a comparable Kalman filter. LocDyn is robust: it rejects outlier noise, while the comparing methods succumb in terms of positioning error.