 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Empty Container Repositioning and Fleet Deployment via Configurable Semi-POMDPs
Jul 25, 2022
With the continuous growth of the global economy and markets, resource imbalance has risen to be one of the central issues in real logistic scenarios. In marine transportation, this trade imbalance leads to Empty Container Repositioning (ECR) problems. Once the freight has been delivered from an exporting country to an importing one, the laden will turn into empty containers that need to be repositioned to satisfy new goods requests in exporting countries. In such problems, the performance that any cooperative repositioning policy can achieve strictly depends on the routes that vessels will follow (i.e., fleet deployment). Historically, Operation Research (OR) approaches were proposed to jointly optimize the repositioning policy along with the fleet of vessels. However, the stochasticity of future supply and demand of containers, together with black-box and non-linear constraints that are present within the environment, make these approaches unsuitable for these scenarios. In this paper, we introduce a novel framework, Configurable Semi-POMDPs, to model this type of problems. Furthermore, we provide a two-stage learning algorithm, "Configure & Conquer" (CC), that first configures the environment by finding an approximation of the optimal fleet deployment strategy, and then "conquers" it by learning an ECR policy in this tuned environmental setting. We validate our approach in large and real-world instances of the problem. Our experiments highlight that CC avoids the pitfalls of OR methods and that it is successful at optimizing both the ECR policy and the fleet of vessels, leading to superior performance in world trade environments.
Learning from Demonstration in the Wild
Nov 08, 2018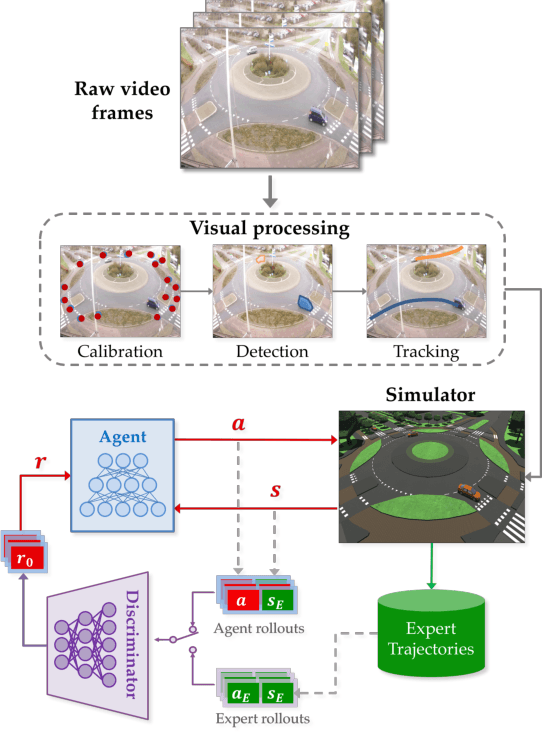
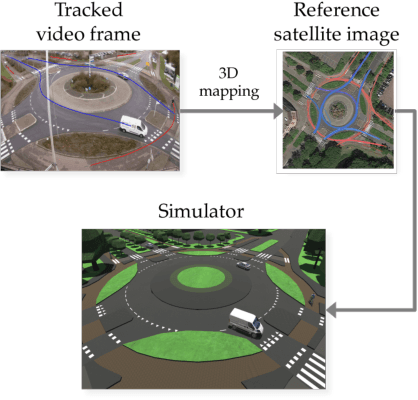
Learning from demonstration (LfD) is useful in settings where hand-coding behaviour or a reward function is impractical. It has succeeded in a wide range of problems but typically relies on artificially generated demonstrations or specially deployed sensors and has not generally been able to leverage the copious demonstrations available in the wild: those that capture behaviour that was occurring anyway using sensors that were already deployed for another purpose, e.g., traffic camera footage capturing demonstrations of natural behaviour of vehicles, cyclists, and pedestrians. We propose video to behaviour (ViBe), a new approach to learning models of road user behaviour that requires as input only unlabelled raw video data of a traffic scene collected from a single, monocular, uncalibrated camera with ordinary resolution. Our approach calibrates the camera, detects relevant objects, tracks them through time, and uses the resulting trajectories to perform LfD, yielding models of naturalistic behaviour. We apply ViBe to raw videos of a traffic intersection and show that it can learn purely from videos, without additional expert knowledge.