 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTACO: Learning Task Decomposition via Temporal Alignment for Control
Paper and Code
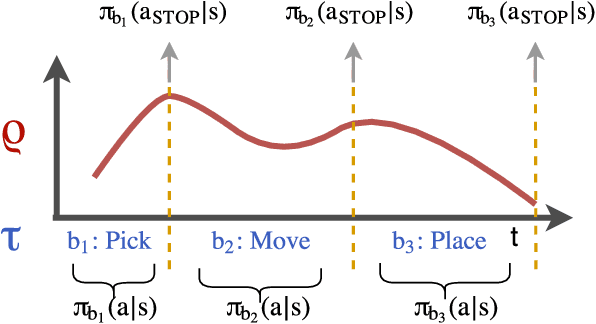
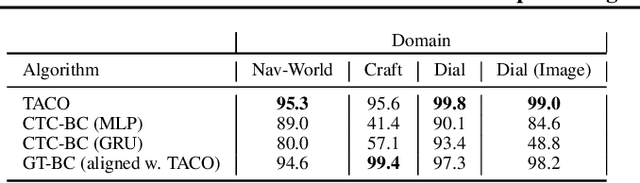
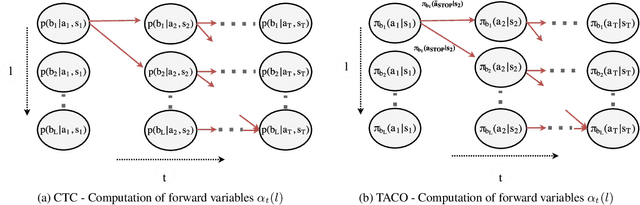
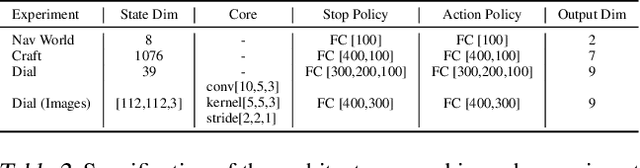
Many advanced Learning from Demonstration (LfD) methods consider the decomposition of complex, real-world tasks into simpler sub-tasks. By reusing the corresponding sub-policies within and between tasks, they provide training data for each policy from different high-level tasks and compose them to perform novel ones. Existing approaches to modular LfD focus either on learning a single high-level task or depend on domain knowledge and temporal segmentation. In contrast, we propose a weakly supervised, domain-agnostic approach based on task sketches, which include only the sequence of sub-tasks performed in each demonstration. Our approach simultaneously aligns the sketches with the observed demonstrations and learns the required sub-policies. This improves generalisation in comparison to separate optimisation procedures. We evaluate the approach on multiple domains, including a simulated 3D robot arm control task using purely image-based observations. The results show that our approach performs commensurately with fully supervised approaches, while requiring significantly less annotation effort.