 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparse View Distractor-Free Gaussian Splatting
Mar 02, 20263D Gaussian Splatting (3DGS) enables efficient training and fast novel view synthesis in static environments. To address challenges posed by transient objects, distractor-free 3DGS methods have emerged and shown promising results when dense image captures are available. However, their performance degrades significantly under sparse input conditions. This limitation primarily stems from the reliance on the color residual heuristics to guide the training, which becomes unreliable with limited observations. In this work, we propose a framework to enhance distractor-free 3DGS under sparse-view conditions by incorporating rich prior information. Specifically, we first adopt the geometry foundation model VGGT to estimate camera parameters and generate a dense set of initial 3D points. Then, we harness the attention maps from VGGT for efficient and accurate semantic entity matching. Additionally, we utilize Vision-Language Models (VLMs) to further identify and preserve the large static regions in the scene. We also demonstrate how these priors can be seamlessly integrated into existing distractor-free 3DGS methods. Extensive experiments confirm the effectiveness and robustness of our approach in mitigating transient distractors for sparse-view 3DGS training.
MeshMimic: Geometry-Aware Humanoid Motion Learning through 3D Scene Reconstruction
Feb 17, 2026Humanoid motion control has witnessed significant breakthroughs in recent years, with deep reinforcement learning (RL) emerging as a primary catalyst for achieving complex, human-like behaviors. However, the high dimensionality and intricate dynamics of humanoid robots make manual motion design impractical, leading to a heavy reliance on expensive motion capture (MoCap) data. These datasets are not only costly to acquire but also frequently lack the necessary geometric context of the surrounding physical environment. Consequently, existing motion synthesis frameworks often suffer from a decoupling of motion and scene, resulting in physical inconsistencies such as contact slippage or mesh penetration during terrain-aware tasks. In this work, we present MeshMimic, an innovative framework that bridges 3D scene reconstruction and embodied intelligence to enable humanoid robots to learn coupled "motion-terrain" interactions directly from video. By leveraging state-of-the-art 3D vision models, our framework precisely segments and reconstructs both human trajectories and the underlying 3D geometry of terrains and objects. We introduce an optimization algorithm based on kinematic consistency to extract high-quality motion data from noisy visual reconstructions, alongside a contact-invariant retargeting method that transfers human-environment interaction features to the humanoid agent. Experimental results demonstrate that MeshMimic achieves robust, highly dynamic performance across diverse and challenging terrains. Our approach proves that a low-cost pipeline utilizing only consumer-grade monocular sensors can facilitate the training of complex physical interactions, offering a scalable path toward the autonomous evolution of humanoid robots in unstructured environments.
MVISTA-4D: View-Consistent 4D World Model with Test-Time Action Inference for Robotic Manipulation
Feb 10, 2026World-model-based imagine-then-act becomes a promising paradigm for robotic manipulation, yet existing approaches typically support either purely image-based forecasting or reasoning over partial 3D geometry, limiting their ability to predict complete 4D scene dynamics. This work proposes a novel embodied 4D world model that enables geometrically consistent, arbitrary-view RGBD generation: given only a single-view RGBD observation as input, the model imagines the remaining viewpoints, which can then be back-projected and fused to assemble a more complete 3D structure across time. To efficiently learn the multi-view, cross-modality generation, we explicitly design cross-view and cross-modality feature fusion that jointly encourage consistency between RGB and depth and enforce geometric alignment across views. Beyond prediction, converting generated futures into actions is often handled by inverse dynamics, which is ill-posed because multiple actions can explain the same transition. We address this with a test-time action optimization strategy that backpropagates through the generative model to infer a trajectory-level latent best matching the predicted future, and a residual inverse dynamics model that turns this trajectory prior into accurate executable actions. Experiments on three datasets demonstrate strong performance on both 4D scene generation and downstream manipulation, and ablations provide practical insights into the key design choices.
DEGS: Deformable Event-based 3D Gaussian Splatting from RGB and Event Stream
Oct 09, 2025Reconstructing Dynamic 3D Gaussian Splatting (3DGS) from low-framerate RGB videos is challenging. This is because large inter-frame motions will increase the uncertainty of the solution space. For example, one pixel in the first frame might have more choices to reach the corresponding pixel in the second frame. Event cameras can asynchronously capture rapid visual changes and are robust to motion blur, but they do not provide color information. Intuitively, the event stream can provide deterministic constraints for the inter-frame large motion by the event trajectories. Hence, combining low-temporal-resolution images with high-framerate event streams can address this challenge. However, it is challenging to jointly optimize Dynamic 3DGS using both RGB and event modalities due to the significant discrepancy between these two data modalities. This paper introduces a novel framework that jointly optimizes dynamic 3DGS from the two modalities. The key idea is to adopt event motion priors to guide the optimization of the deformation fields. First, we extract the motion priors encoded in event streams by using the proposed LoCM unsupervised fine-tuning framework to adapt an event flow estimator to a certain unseen scene. Then, we present the geometry-aware data association method to build the event-Gaussian motion correspondence, which is the primary foundation of the pipeline, accompanied by two useful strategies, namely motion decomposition and inter-frame pseudo-label. Extensive experiments show that our method outperforms existing image and event-based approaches across synthetic and real scenes and prove that our method can effectively optimize dynamic 3DGS with the help of event data.
DPL: Depth-only Perceptive Humanoid Locomotion via Realistic Depth Synthesis and Cross-Attention Terrain Reconstruction
Oct 08, 2025Recent advancements in legged robot perceptive locomotion have shown promising progress. However, terrain-aware humanoid locomotion remains largely constrained to two paradigms: depth image-based end-to-end learning and elevation map-based methods. The former suffers from limited training efficiency and a significant sim-to-real gap in depth perception, while the latter depends heavily on multiple vision sensors and localization systems, resulting in latency and reduced robustness. To overcome these challenges, we propose a novel framework that tightly integrates three key components: (1) Terrain-Aware Locomotion Policy with a Blind Backbone, which leverages pre-trained elevation map-based perception to guide reinforcement learning with minimal visual input; (2) Multi-Modality Cross-Attention Transformer, which reconstructs structured terrain representations from noisy depth images; (3) Realistic Depth Images Synthetic Method, which employs self-occlusion-aware ray casting and noise-aware modeling to synthesize realistic depth observations, achieving over 30\% reduction in terrain reconstruction error. This combination enables efficient policy training with limited data and hardware resources, while preserving critical terrain features essential for generalization. We validate our framework on a full-sized humanoid robot, demonstrating agile and adaptive locomotion across diverse and challenging terrains.
Humanoid Occupancy: Enabling A Generalized Multimodal Occupancy Perception System on Humanoid Robots
Jul 27, 2025Humanoid robot technology is advancing rapidly, with manufacturers introducing diverse heterogeneous visual perception modules tailored to specific scenarios. Among various perception paradigms, occupancy-based representation has become widely recognized as particularly suitable for humanoid robots, as it provides both rich semantic and 3D geometric information essential for comprehensive environmental understanding. In this work, we present Humanoid Occupancy, a generalized multimodal occupancy perception system that integrates hardware and software components, data acquisition devices, and a dedicated annotation pipeline. Our framework employs advanced multi-modal fusion techniques to generate grid-based occupancy outputs encoding both occupancy status and semantic labels, thereby enabling holistic environmental understanding for downstream tasks such as task planning and navigation. To address the unique challenges of humanoid robots, we overcome issues such as kinematic interference and occlusion, and establish an effective sensor layout strategy. Furthermore, we have developed the first panoramic occupancy dataset specifically for humanoid robots, offering a valuable benchmark and resource for future research and development in this domain. The network architecture incorporates multi-modal feature fusion and temporal information integration to ensure robust perception. Overall, Humanoid Occupancy delivers effective environmental perception for humanoid robots and establishes a technical foundation for standardizing universal visual modules, paving the way for the widespread deployment of humanoid robots in complex real-world scenarios.
Occupancy World Model for Robots
May 07, 2025Understanding and forecasting the scene evolutions deeply affect the exploration and decision of embodied agents. While traditional methods simulate scene evolutions through trajectory prediction of potential instances, current works use the occupancy world model as a generative framework for describing fine-grained overall scene dynamics. However, existing methods cluster on the outdoor structured road scenes, while ignoring the exploration of forecasting 3D occupancy scene evolutions for robots in indoor scenes. In this work, we explore a new framework for learning the scene evolutions of observed fine-grained occupancy and propose an occupancy world model based on the combined spatio-temporal receptive field and guided autoregressive transformer to forecast the scene evolutions, called RoboOccWorld. We propose the Conditional Causal State Attention (CCSA), which utilizes camera poses of next state as conditions to guide the autoregressive transformer to adapt and understand the indoor robotics scenarios. In order to effectively exploit the spatio-temporal cues from historical observations, Hybrid Spatio-Temporal Aggregation (HSTA) is proposed to obtain the combined spatio-temporal receptive field based on multi-scale spatio-temporal windows. In addition, we restructure the OccWorld-ScanNet benchmark based on local annotations to facilitate the evaluation of the indoor 3D occupancy scene evolution prediction task. Experimental results demonstrate that our RoboOccWorld outperforms state-of-the-art methods in indoor 3D occupancy scene evolution prediction task. The code will be released soon.
Modality-Composable Diffusion Policy via Inference-Time Distribution-level Composition
Mar 16, 2025Diffusion Policy (DP) has attracted significant attention as an effective method for policy representation due to its capacity to model multi-distribution dynamics. However, current DPs are often based on a single visual modality (e.g., RGB or point cloud), limiting their accuracy and generalization potential. Although training a generalized DP capable of handling heterogeneous multimodal data would enhance performance, it entails substantial computational and data-related costs. To address these challenges, we propose a novel policy composition method: by leveraging multiple pre-trained DPs based on individual visual modalities, we can combine their distributional scores to form a more expressive Modality-Composable Diffusion Policy (MCDP), without the need for additional training. Through extensive empirical experiments on the RoboTwin dataset, we demonstrate the potential of MCDP to improve both adaptability and performance. This exploration aims to provide valuable insights into the flexible composition of existing DPs, facilitating the development of generalizable cross-modality, cross-domain, and even cross-embodiment policies. Our code is open-sourced at https://github.com/AndyCao1125/MCDP.
EmbodiedVSR: Dynamic Scene Graph-Guided Chain-of-Thought Reasoning for Visual Spatial Tasks
Mar 14, 2025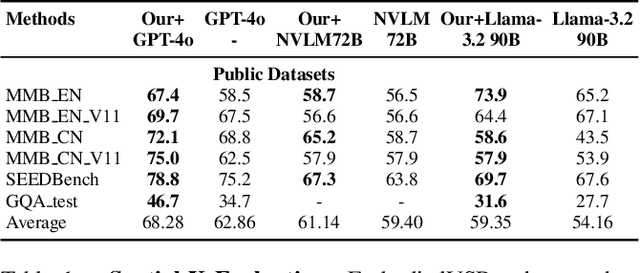
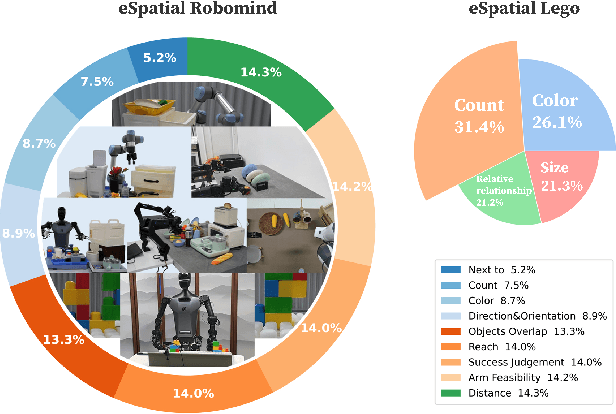
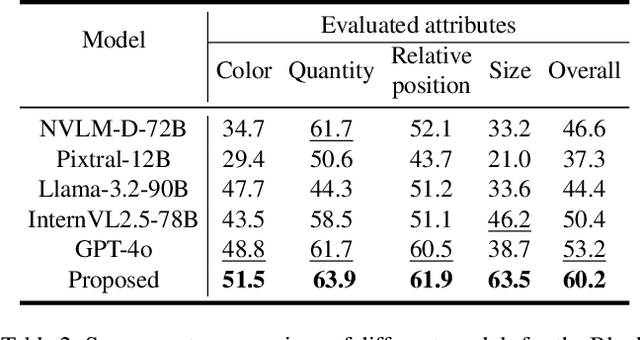
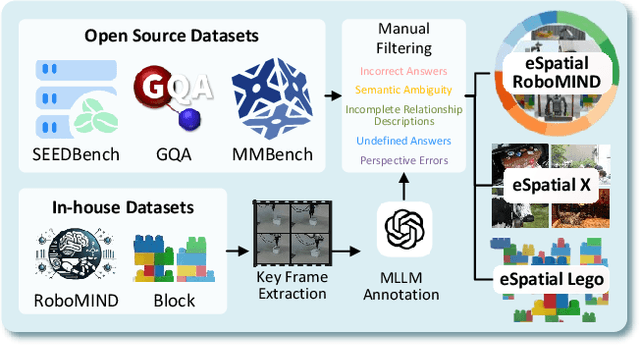
While multimodal large language models (MLLMs) have made groundbreaking progress in embodied intelligence, they still face significant challenges in spatial reasoning for complex long-horizon tasks. To address this gap, we propose EmbodiedVSR (Embodied Visual Spatial Reasoning), a novel framework that integrates dynamic scene graph-guided Chain-of-Thought (CoT) reasoning to enhance spatial understanding for embodied agents. By explicitly constructing structured knowledge representations through dynamic scene graphs, our method enables zero-shot spatial reasoning without task-specific fine-tuning. This approach not only disentangles intricate spatial relationships but also aligns reasoning steps with actionable environmental dynamics. To rigorously evaluate performance, we introduce the eSpatial-Benchmark, a comprehensive dataset including real-world embodied scenarios with fine-grained spatial annotations and adaptive task difficulty levels. Experiments demonstrate that our framework significantly outperforms existing MLLM-based methods in accuracy and reasoning coherence, particularly in long-horizon tasks requiring iterative environment interaction. The results reveal the untapped potential of MLLMs for embodied intelligence when equipped with structured, explainable reasoning mechanisms, paving the way for more reliable deployment in real-world spatial applications. The codes and datasets will be released soon.
HumanoidPano: Hybrid Spherical Panoramic-LiDAR Cross-Modal Perception for Humanoid Robots
Mar 13, 2025The perceptual system design for humanoid robots poses unique challenges due to inherent structural constraints that cause severe self-occlusion and limited field-of-view (FOV). We present HumanoidPano, a novel hybrid cross-modal perception framework that synergistically integrates panoramic vision and LiDAR sensing to overcome these limitations. Unlike conventional robot perception systems that rely on monocular cameras or standard multi-sensor configurations, our method establishes geometrically-aware modality alignment through a spherical vision transformer, enabling seamless fusion of 360 visual context with LiDAR's precise depth measurements. First, Spherical Geometry-aware Constraints (SGC) leverage panoramic camera ray properties to guide distortion-regularized sampling offsets for geometric alignment. Second, Spatial Deformable Attention (SDA) aggregates hierarchical 3D features via spherical offsets, enabling efficient 360{\deg}-to-BEV fusion with geometrically complete object representations. Third, Panoramic Augmentation (AUG) combines cross-view transformations and semantic alignment to enhance BEV-panoramic feature consistency during data augmentation. Extensive evaluations demonstrate state-of-the-art performance on the 360BEV-Matterport benchmark. Real-world deployment on humanoid platforms validates the system's capability to generate accurate BEV segmentation maps through panoramic-LiDAR co-perception, directly enabling downstream navigation tasks in complex environments. Our work establishes a new paradigm for embodied perception in humanoid robotics.