 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometry without Position? When Positional Embeddings Help and Hurt Spatial Reasoning
Jan 29, 2026This paper revisits the role of positional embeddings (PEs) within vision transformers (ViTs) from a geometric perspective. We show that PEs are not mere token indices but effectively function as geometric priors that shape the spatial structure of the representation. We introduce token-level diagnostics that measure how multi-view geometric consistency in ViT representation depends on consitent PEs. Through extensive experiments on 14 foundation ViT models, we reveal how PEs influence multi-view geometry and spatial reasoning. Our findings clarify the role of PEs as a causal mechanism that governs spatial structure in ViT representations. Our code is provided in https://github.com/shijianjian/vit-geometry-probes
Exploring Reliable Spatiotemporal Dependencies for Efficient Visual Tracking
Jan 14, 2026Recent advances in transformer-based lightweight object tracking have established new standards across benchmarks, leveraging the global receptive field and powerful feature extraction capabilities of attention mechanisms. Despite these achievements, existing methods universally employ sparse sampling during training--utilizing only one template and one search image per sequence--which fails to comprehensively explore spatiotemporal information in videos. This limitation constrains performance and cause the gap between lightweight and high-performance trackers. To bridge this divide while maintaining real-time efficiency, we propose STDTrack, a framework that pioneers the integration of reliable spatiotemporal dependencies into lightweight trackers. Our approach implements dense video sampling to maximize spatiotemporal information utilization. We introduce a temporally propagating spatiotemporal token to guide per-frame feature extraction. To ensure comprehensive target state representation, we disign the Multi-frame Information Fusion Module (MFIFM), which augments current dependencies using historical context. The MFIFM operates on features stored in our constructed Spatiotemporal Token Maintainer (STM), where a quality-based update mechanism ensures information reliability. Considering the scale variation among tracking targets, we develop a multi-scale prediction head to dynamically adapt to objects of different sizes. Extensive experiments demonstrate state-of-the-art results across six benchmarks. Notably, on GOT-10k, STDTrack rivals certain high-performance non-real-time trackers (e.g., MixFormer) while operating at 192 FPS(GPU) and 41 FPS(CPU).
* 8 pages, 6 figures
Strategic Decision-Making Under Uncertainty through Bi-Level Game Theory and Distributionally Robust Optimization
Nov 07, 2025In strategic scenarios where decision-makers operate at different hierarchical levels, traditional optimization methods are often inadequate for handling uncertainties from incomplete information or unpredictable external factors. To fill this gap, we introduce a mathematical framework that integrates bi-level game theory with distributionally robust optimization (DRO), particularly suited for complex network systems. Our approach leverages the hierarchical structure of bi-level games to model leader-follower interactions while incorporating distributional robustness to guard against worst-case probability distributions. To ensure computational tractability, the Karush-Kuhn-Tucker (KKT) conditions are used to transform the bi-level challenge into a more manageable single-level model, and the infinite-dimensional DRO problem is reformulated into a finite equivalent. We propose a generalized algorithm to solve this integrated model. Simulation results validate our framework's efficacy, demonstrating that under high uncertainty, the proposed model achieves up to a 22\% cost reduction compared to traditional stochastic methods while maintaining a service level of over 90\%. This highlights its potential to significantly improve decision quality and robustness in networked systems such as transportation and communication networks.
Kornia-rs: A Low-Level 3D Computer Vision Library In Rust
May 18, 2025We present \textit{kornia-rs}, a high-performance 3D computer vision library written entirely in native Rust, designed for safety-critical and real-time applications. Unlike C++-based libraries like OpenCV or wrapper-based solutions like OpenCV-Rust, \textit{kornia-rs} is built from the ground up to leverage Rust's ownership model and type system for memory and thread safety. \textit{kornia-rs} adopts a statically-typed tensor system and a modular set of crates, providing efficient image I/O, image processing and 3D operations. To aid cross-platform compatibility, \textit{kornia-rs} offers Python bindings, enabling seamless and efficient integration with Rust code. Empirical results show that \textit{kornia-rs} achieves a 3~ 5 times speedup in image transformation tasks over native Rust alternatives, while offering comparable performance to C++ wrapper-based libraries. In addition to 2D vision capabilities, \textit{kornia-rs} addresses a significant gap in the Rust ecosystem by providing a set of 3D computer vision operators. This paper presents the architecture and performance characteristics of \textit{kornia-rs}, demonstrating its effectiveness in real-world computer vision applications.
HOGSA: Bimanual Hand-Object Interaction Understanding with 3D Gaussian Splatting Based Data Augmentation
Jan 06, 2025



Understanding of bimanual hand-object interaction plays an important role in robotics and virtual reality. However, due to significant occlusions between hands and object as well as the high degree-of-freedom motions, it is challenging to collect and annotate a high-quality, large-scale dataset, which prevents further improvement of bimanual hand-object interaction-related baselines. In this work, we propose a new 3D Gaussian Splatting based data augmentation framework for bimanual hand-object interaction, which is capable of augmenting existing dataset to large-scale photorealistic data with various hand-object pose and viewpoints. First, we use mesh-based 3DGS to model objects and hands, and to deal with the rendering blur problem due to multi-resolution input images used, we design a super-resolution module. Second, we extend the single hand grasping pose optimization module for the bimanual hand object to generate various poses of bimanual hand-object interaction, which can significantly expand the pose distribution of the dataset. Third, we conduct an analysis for the impact of different aspects of the proposed data augmentation on the understanding of the bimanual hand-object interaction. We perform our data augmentation on two benchmarks, H2O and Arctic, and verify that our method can improve the performance of the baselines.
Amodal Depth Anything: Amodal Depth Estimation in the Wild
Dec 03, 2024Amodal depth estimation aims to predict the depth of occluded (invisible) parts of objects in a scene. This task addresses the question of whether models can effectively perceive the geometry of occluded regions based on visible cues. Prior methods primarily rely on synthetic datasets and focus on metric depth estimation, limiting their generalization to real-world settings due to domain shifts and scalability challenges. In this paper, we propose a novel formulation of amodal depth estimation in the wild, focusing on relative depth prediction to improve model generalization across diverse natural images. We introduce a new large-scale dataset, Amodal Depth In the Wild (ADIW), created using a scalable pipeline that leverages segmentation datasets and compositing techniques. Depth maps are generated using large pre-trained depth models, and a scale-and-shift alignment strategy is employed to refine and blend depth predictions, ensuring consistency in ground-truth annotations. To tackle the amodal depth task, we present two complementary frameworks: Amodal-DAV2, a deterministic model based on Depth Anything V2, and Amodal-DepthFM, a generative model that integrates conditional flow matching principles. Our proposed frameworks effectively leverage the capabilities of large pre-trained models with minimal modifications to achieve high-quality amodal depth predictions. Experiments validate our design choices, demonstrating the flexibility of our models in generating diverse, plausible depth structures for occluded regions. Our method achieves a 69.5% improvement in accuracy over the previous SoTA on the ADIW dataset.
SPAC-Net: Rethinking Point Cloud Completion with Structural Prior
Nov 22, 2024Point cloud completion aims to infer a complete shape from its partial observation. Many approaches utilize a pure encoderdecoder paradigm in which complete shape can be directly predicted by shape priors learned from partial scans, however, these methods suffer from the loss of details inevitably due to the feature abstraction issues. In this paper, we propose a novel framework,termed SPAC-Net, that aims to rethink the completion task under the guidance of a new structural prior, we call it interface. Specifically, our method first investigates Marginal Detector (MAD) module to localize the interface, defined as the intersection between the known observation and the missing parts. Based on the interface, our method predicts the coarse shape by learning the displacement from the points in interface move to their corresponding position in missing parts. Furthermore, we devise an additional Structure Supplement(SSP) module before the upsampling stage to enhance the structural details of the coarse shape, enabling the upsampling module to focus more on the upsampling task. Extensive experiments have been conducted on several challenging benchmarks, and the results demonstrate that our method outperforms existing state-of-the-art approaches.
StereoCrafter-Zero: Zero-Shot Stereo Video Generation with Noisy Restart
Nov 21, 2024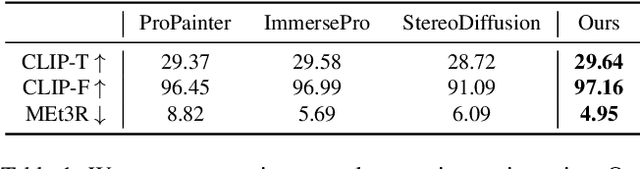



Generating high-quality stereo videos that mimic human binocular vision requires maintaining consistent depth perception and temporal coherence across frames. While diffusion models have advanced image and video synthesis, generating high-quality stereo videos remains challenging due to the difficulty of maintaining consistent temporal and spatial coherence between left and right views. We introduce \textit{StereoCrafter-Zero}, a novel framework for zero-shot stereo video generation that leverages video diffusion priors without the need for paired training data. Key innovations include a noisy restart strategy to initialize stereo-aware latents and an iterative refinement process that progressively harmonizes the latent space, addressing issues like temporal flickering and view inconsistencies. Comprehensive evaluations, including quantitative metrics and user studies, demonstrate that \textit{StereoCrafter-Zero} produces high-quality stereo videos with improved depth consistency and temporal smoothness, even when depth estimations are imperfect. Our framework is robust and adaptable across various diffusion models, setting a new benchmark for zero-shot stereo video generation and enabling more immersive visual experiences. Our code can be found in~\url{https://github.com/shijianjian/StereoCrafter-Zero}.
OCMG-Net: Neural Oriented Normal Refinement for Unstructured Point Clouds
Sep 02, 2024We present a robust refinement method for estimating oriented normals from unstructured point clouds. In contrast to previous approaches that either suffer from high computational complexity or fail to achieve desirable accuracy, our novel framework incorporates sign orientation and data augmentation in the feature space to refine the initial oriented normals, striking a balance between efficiency and accuracy. To address the issue of noise-caused direction inconsistency existing in previous approaches, we introduce a new metric called the Chamfer Normal Distance, which faithfully minimizes the estimation error by correcting the annotated normal with the closest point found on the potentially clean point cloud. This metric not only tackles the challenge but also aids in network training and significantly enhances network robustness against noise. Moreover, we propose an innovative dual-parallel architecture that integrates Multi-scale Local Feature Aggregation and Hierarchical Geometric Information Fusion, which enables the network to capture intricate geometric details more effectively and notably reduces ambiguity in scale selection. Extensive experiments demonstrate the superiority and versatility of our method in both unoriented and oriented normal estimation tasks across synthetic and real-world datasets among indoor and outdoor scenarios. The code is available at https://github.com/YingruiWoo/OCMG-Net.git.
Leveraging 3D LiDAR Sensors to Enable Enhanced Urban Safety and Public Health: Pedestrian Monitoring and Abnormal Activity Detection
Apr 17, 2024The integration of Light Detection and Ranging (LiDAR) and Internet of Things (IoT) technologies offers transformative opportunities for public health informatics in urban safety and pedestrian well-being. This paper proposes a novel framework utilizing these technologies for enhanced 3D object detection and activity classification in urban traffic scenarios. By employing elevated LiDAR, we obtain detailed 3D point cloud data, enabling precise pedestrian activity monitoring. To overcome urban data scarcity, we create a specialized dataset through simulated traffic environments in Blender, facilitating targeted model training. Our approach employs a modified Point Voxel-Region-based Convolutional Neural Network (PV-RCNN) for robust 3D detection and PointNet for classifying pedestrian activities, significantly benefiting urban traffic management and public health by offering insights into pedestrian behavior and promoting safer urban environments. Our dual-model approach not only enhances urban traffic management but also contributes significantly to public health by providing insights into pedestrian behavior and promoting safer urban environment.