 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiDAR for Crowd Management: Applications, Benefits, and Future Directions
Mar 29, 2026Light Detection and Ranging (LiDAR) technology offers significant advantages for effective crowd management. This article presents LiDAR technology and highlights its primary advantages over other monitoring technologies, including enhanced privacy, performance in various weather conditions, and precise 3D mapping. We present a general taxonomy of four key tasks in crowd management: crowd detection, counting, tracking, and behavior classification, with illustrative examples of LiDAR applications for each task. We identify challenges and open research directions, including the scarcity of dedicated datasets, sensor fusion requirements, artificial intelligence integration, and processing needs for LiDAR point clouds. This article offers actionable insights for developing crowd management solutions tailored to public safety applications.
Enhanced In-Flight Connectivity for Urban Air Mobility via LEO Satellite Networks
Jun 11, 2024Urban Air Mobility (UAM) is the envisioned future of inter-city aerial transportation. This paper presents a novel, in-flight connectivity link allocation method for UAM, which dynamically switches between terrestrial cellular and Low Earth Orbit (LEO) satellite networks based on real-time conditions. Our approach prefers cellular networks for cost efficiency, switching to LEO satellites under poor cellular conditions to ensure continuous UAM connectivity. By integrating real-time metrics like signal strength, network congestion, and flight trajectory into the selection process, our algorithm effectively balances cost, minimum data rate requirements, and continuity of communication. Numerical results validate minimization of data-loss while ensuring an optimal selection from the set of available above-threshold data rates at every time sample. Furthermore, insights derived from our study emphasize the importance of hybrid connectivity solutions in ensuring seamless, uninterrupted communication for future urban aerial vehicles.
Empowering Urban Traffic Management: Elevated 3D LiDAR for Data Collection and Advanced Object Detection Analysis
May 21, 2024



The 3D object detection capabilities in urban environments have been enormously improved by recent developments in Light Detection and Range (LiDAR) technology. This paper presents a novel framework that transforms the detection and analysis of 3D objects in traffic scenarios by utilizing the power of elevated LiDAR sensors. We are presenting our methodology's remarkable capacity to collect complex 3D point cloud data, which allows us to accurately and in detail capture the dynamics of urban traffic. Due to the limitation in obtaining real-world traffic datasets, we utilize the simulator to generate 3D point cloud for specific scenarios. To support our experimental analysis, we firstly simulate various 3D point cloud traffic-related objects. Then, we use this dataset as a basis for training and evaluating our 3D object detection models, in identifying and monitoring both vehicles and pedestrians in simulated urban traffic environments. Next, we fine tune the Point Voxel-Region-based Convolutional Neural Network (PV-RCNN) architecture, making it more suited to handle and understand the massive volumes of point cloud data generated by our urban traffic simulations. Our results show the effectiveness of the proposed solution in accurately detecting objects in traffic scenes and highlight the role of LiDAR in improving urban safety and advancing intelligent transportation systems.
Leveraging 3D LiDAR Sensors to Enable Enhanced Urban Safety and Public Health: Pedestrian Monitoring and Abnormal Activity Detection
Apr 17, 2024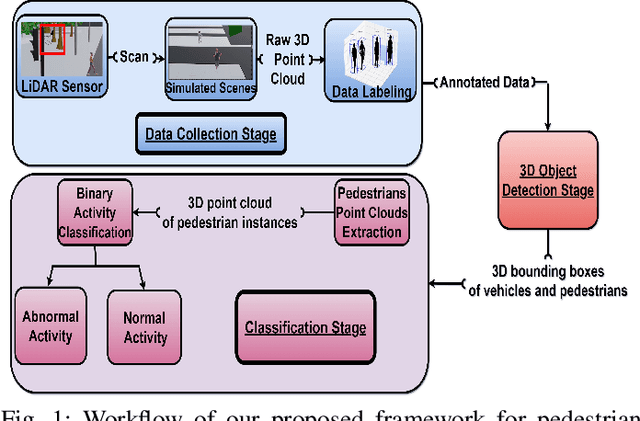
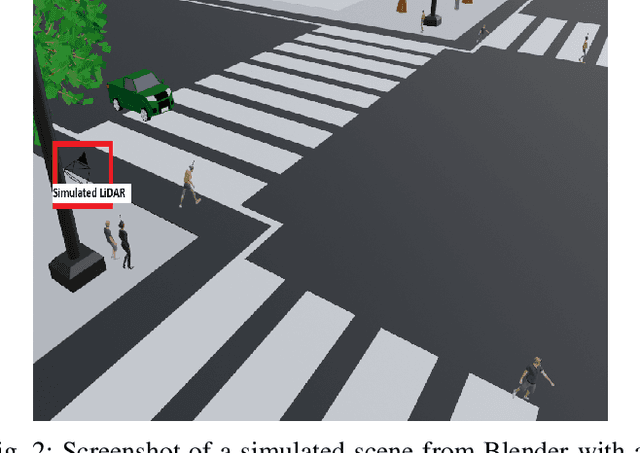
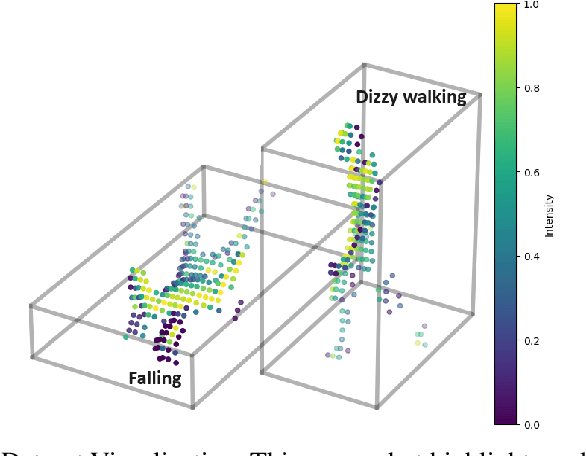
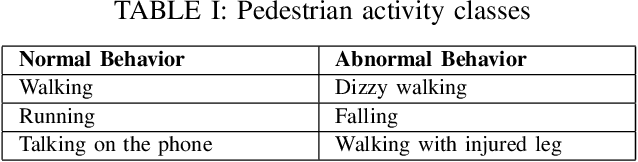
The integration of Light Detection and Ranging (LiDAR) and Internet of Things (IoT) technologies offers transformative opportunities for public health informatics in urban safety and pedestrian well-being. This paper proposes a novel framework utilizing these technologies for enhanced 3D object detection and activity classification in urban traffic scenarios. By employing elevated LiDAR, we obtain detailed 3D point cloud data, enabling precise pedestrian activity monitoring. To overcome urban data scarcity, we create a specialized dataset through simulated traffic environments in Blender, facilitating targeted model training. Our approach employs a modified Point Voxel-Region-based Convolutional Neural Network (PV-RCNN) for robust 3D detection and PointNet for classifying pedestrian activities, significantly benefiting urban traffic management and public health by offering insights into pedestrian behavior and promoting safer urban environments. Our dual-model approach not only enhances urban traffic management but also contributes significantly to public health by providing insights into pedestrian behavior and promoting safer urban environment.
Learning the References of Online Model Predictive Control for Urban Self-Driving
Aug 30, 2023In this work, we propose a novel learning-based online model predictive control (MPC) framework for motion synthesis of self-driving vehicles. In this framework, the decision variables are generated as instantaneous references to modulate the cost functions of online MPC, where the constraints of collision avoidance and drivable surface boundaries are latently represented in the soft form. Hence, the embodied maneuvers of the ego vehicle are empowered to adapt to complex and dynamic traffic environments, even with unmodeled uncertainties of other traffic participants. Furthermore, we implement a deep reinforcement learning (DRL) framework for policy search to cast the step actions as the decision variables, where the practical and lightweight observations are considered as the input features of the policy network. The proposed approach is implemented in the high-fidelity simulator involving compound-complex urban driving scenarios, and the results demonstrate that the proposed development manifests remarkable adaptiveness to complex and dynamic traffic environments with a success rate of 85%. Also, its advantages in terms of safety, maneuverability, and robustness are illustrated.
Chance-Aware Lane Change with High-Level Model Predictive Control Through Curriculum Reinforcement Learning
Mar 07, 2023Lane change in dense traffic is considered a challenging problem that typically requires the recognization of an opportune and appropriate time for maneuvers. In this work, we propose a chance-aware lane-change strategy with high-level model predictive control (MPC) through curriculum reinforcement learning (CRL). The embodied high-level MPC in our proposed framework is parameterized with augmented decision variables, where full-state references and regulatory factors concerning their importance are introduced. In this sense, improved adaptiveness to dense and dynamic environments with high complexity is exhibited. Furthermore, to improve the convergence speed and ensure a high-quality policy, effective curriculum design is integrated into the reinforcement learning (RL) framework with policy transfer and enhancement. With comprehensive experiments towards the chance-aware lane-change scenario, accelerated convergence speed and improved reward performance are demonstrated through comparisons with representative baseline methods. It is noteworthy that, given a narrow chance in the dense and dynamic traffic flow, the proposed approach generates high-quality lane-change maneuvers such that the vehicle merges into the traffic flow with a high success rate.
Dissolving Is Amplifying: Towards Fine-Grained Anomaly Detection
Feb 28, 2023



Medical anomalous data normally contains fine-grained instance-wise additive feature patterns (e.g. tumor, hemorrhage), that are oftenly critical but insignificant. Interestingly, apart from the remarkable image generation abilities of diffusion models, we observed that diffusion models can dissolve image details for a given image, resulting in generalized feature representations. We hereby propose DIA, dissolving is amplifying, that amplifies fine-grained image features by contrasting an image against its feature dissolved counterpart. In particular, we show that diffusion models can serve as semantic preserving feature dissolvers that help learning fine-grained anomalous patterns for anomaly detection tasks, especially for medical domains with fine-grained feature differences. As a result, our method yields a novel fine-grained anomaly detection method, aims at amplifying instance-level feature patterns, that significantly improves medical anomaly detection accuracy in a large margin without any prior knowledge of explicit fine-grained anomalous feature patterns.
Service Discovery in Social Internet of Things using Graph Neural Networks
May 25, 2022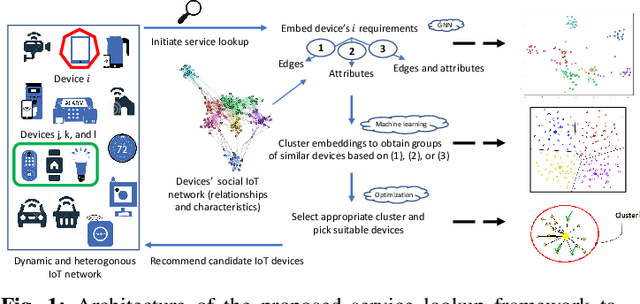
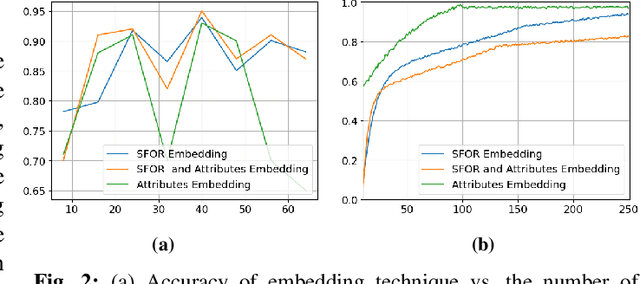
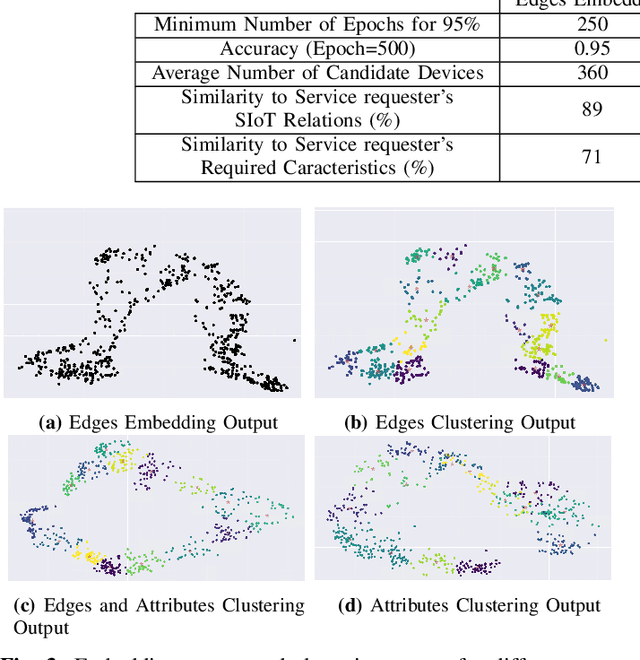
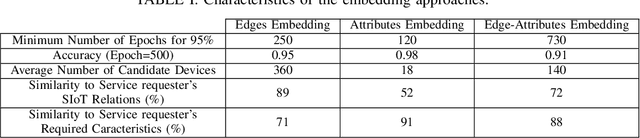
Internet-of-Things (IoT) networks intelligently connect thousands of physical entities to provide various services for the community. It is witnessing an exponential expansion, which is complicating the process of discovering IoT devices existing in the network and requesting corresponding services from them. As the highly dynamic nature of the IoT environment hinders the use of traditional solutions of service discovery, we aim, in this paper, to address this issue by proposing a scalable resource allocation neural model adequate for heterogeneous large-scale IoT networks. We devise a Graph Neural Network (GNN) approach that utilizes the social relationships formed between the devices in the IoT network to reduce the search space of any entity lookup and acquire a service from another device in the network. This proposed resource allocation approach surpasses standardization issues and embeds the structure and characteristics of the social IoT graph, by the means of GNNs, for eventual clustering analysis process. Simulation results applied on a real-world dataset illustrate the performance of this solution and its significant efficiency to operate on large-scale IoT networks.
A Machine Learning Smartphone-based Sensing for Driver Behavior Classification
Feb 01, 2022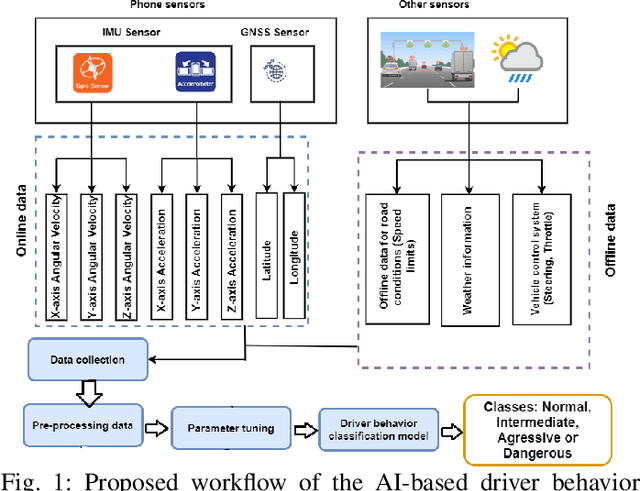
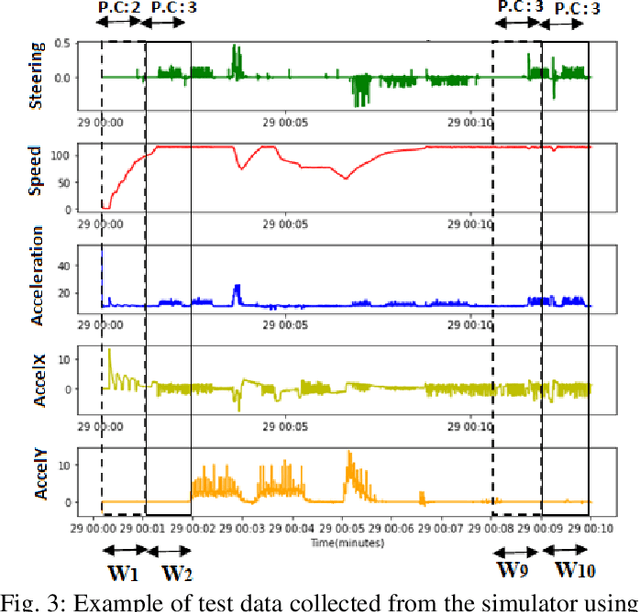
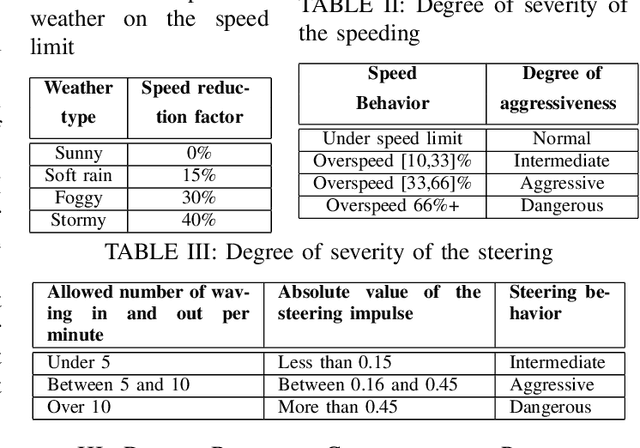
Driver behavior profiling is one of the main issues in the insurance industries and fleet management, thus being able to classify the driver behavior with low-cost mobile applications remains in the spotlight of autonomous driving. However, using mobile sensors may face the challenge of security, privacy, and trust issues. To overcome those challenges, we propose to collect data sensors using Carla Simulator available in smartphones (Accelerometer, Gyroscope, GPS) in order to classify the driver behavior using speed, acceleration, direction, the 3-axis rotation angles (Yaw, Pitch, Roll) taking into account the speed limit of the current road and weather conditions to better identify the risky behavior. Secondly, after fusing inter-axial data from multiple sensors into a single file, we explore different machine learning algorithms for time series classification to evaluate which algorithm results in the highest performance.
Low Complexity Recruitment for Collaborative Mobile Crowdsourcing Using Graph Neural Networks
Jun 01, 2021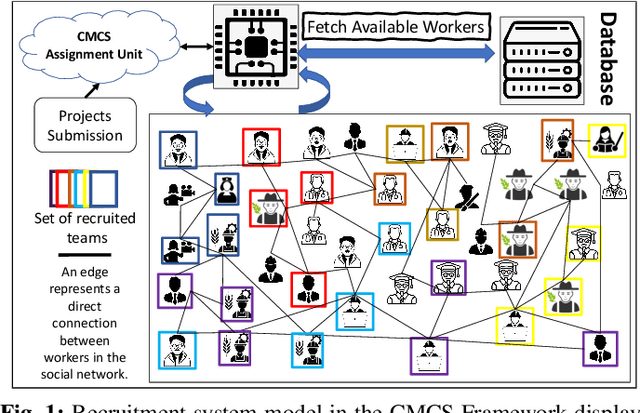
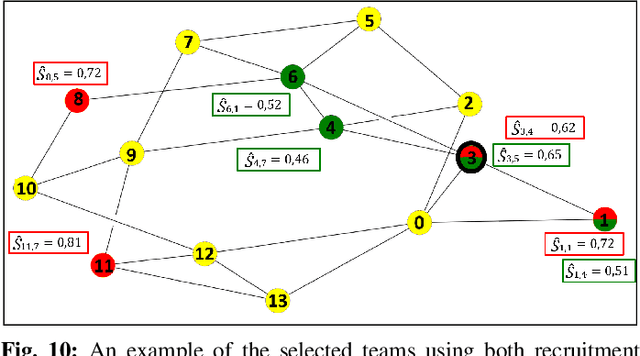
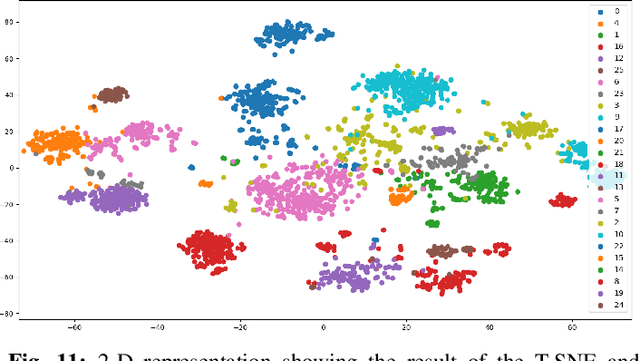
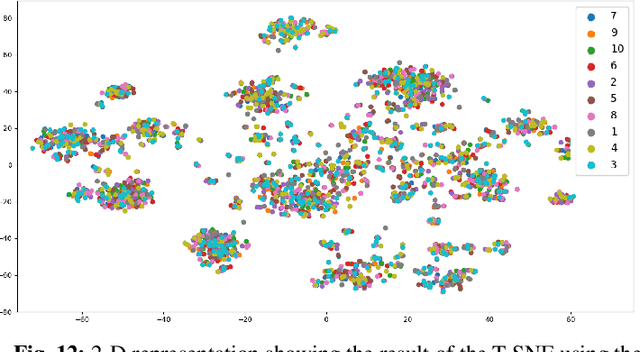
Collaborative Mobile crowdsourcing (CMCS) allows entities, e.g., local authorities or individuals, to hire a team of workers from the crowd of connected people, to execute complex tasks. In this paper, we investigate two different CMCS recruitment strategies allowing task requesters to form teams of socially connected and skilled workers: i) a platform-based strategy where the platform exploits its own knowledge about the workers to form a team and ii) a leader-based strategy where the platform designates a group leader that recruits its own suitable team given its own knowledge about its Social Network (SN) neighbors. We first formulate the recruitment as an Integer Linear Program (ILP) that optimally forms teams according to four fuzzy-logic-based criteria: level of expertise, social relationship strength, recruitment cost, and recruiter's confidence level. To cope with NP-hardness, we design a novel low-complexity CMCS recruitment approach relying on Graph Neural Networks (GNNs), specifically graph embedding and clustering techniques, to shrink the workers' search space and afterwards, exploiting a meta-heuristic genetic algorithm to select appropriate workers. Simulation results applied on a real-world dataset illustrate the performance of both proposed CMCS recruitment approaches. It is shown that our proposed low-complexity GNN-based recruitment algorithm achieves close performances to those of the baseline ILP with significant computational time saving and ability to operate on large-scale mobile crowdsourcing platforms. It is also shown that compared to the leader-based strategy, the platform-based strategy recruits a more skilled team but with lower SN relationships and higher cost.