 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPAC-Net: Rethinking Point Cloud Completion with Structural Prior
Nov 22, 2024



Point cloud completion aims to infer a complete shape from its partial observation. Many approaches utilize a pure encoderdecoder paradigm in which complete shape can be directly predicted by shape priors learned from partial scans, however, these methods suffer from the loss of details inevitably due to the feature abstraction issues. In this paper, we propose a novel framework,termed SPAC-Net, that aims to rethink the completion task under the guidance of a new structural prior, we call it interface. Specifically, our method first investigates Marginal Detector (MAD) module to localize the interface, defined as the intersection between the known observation and the missing parts. Based on the interface, our method predicts the coarse shape by learning the displacement from the points in interface move to their corresponding position in missing parts. Furthermore, we devise an additional Structure Supplement(SSP) module before the upsampling stage to enhance the structural details of the coarse shape, enabling the upsampling module to focus more on the upsampling task. Extensive experiments have been conducted on several challenging benchmarks, and the results demonstrate that our method outperforms existing state-of-the-art approaches.
HOI-Diff: Text-Driven Synthesis of 3D Human-Object Interactions using Diffusion Models
Dec 11, 2023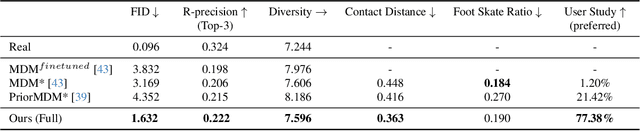
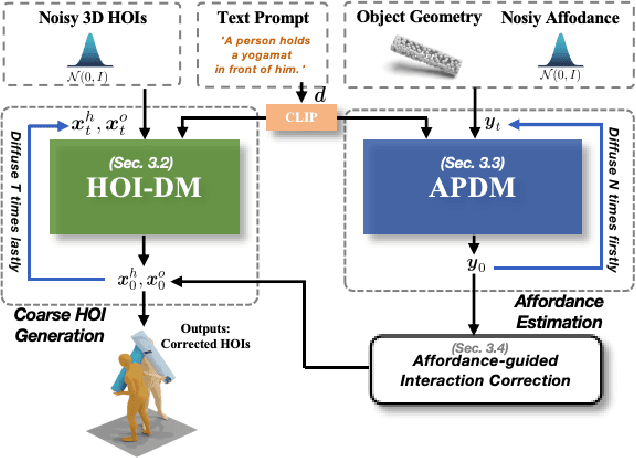
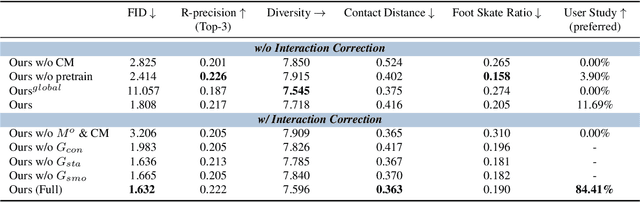
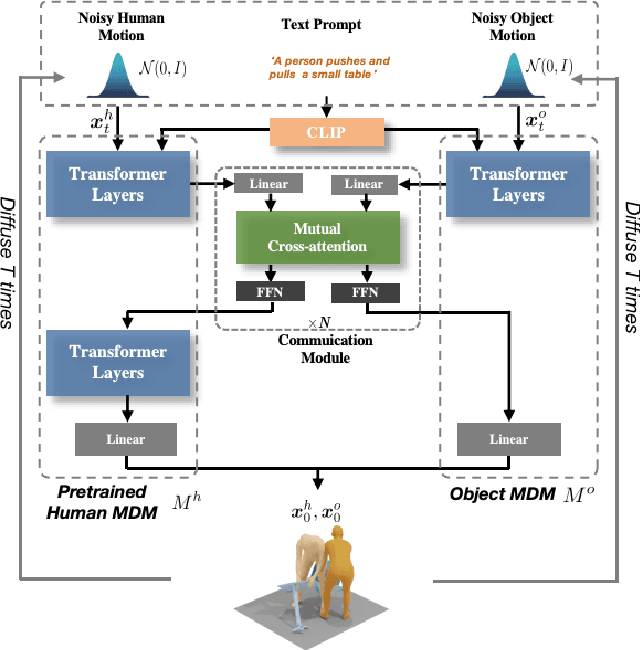
We address the problem of generating realistic 3D human-object interactions (HOIs) driven by textual prompts. Instead of a single model, our key insight is to take a modular design and decompose the complex task into simpler sub-tasks. We first develop a dual-branch diffusion model (HOI-DM) to generate both human and object motions conditioning on the input text, and encourage coherent motions by a cross-attention communication module between the human and object motion generation branches. We also develop an affordance prediction diffusion model (APDM) to predict the contacting area between the human and object during the interactions driven by the textual prompt. The APDM is independent of the results by the HOI-DM and thus can correct potential errors by the latter. Moreover, it stochastically generates the contacting points to diversify the generated motions. Finally, we incorporate the estimated contacting points into the classifier-guidance to achieve accurate and close contact between humans and objects. To train and evaluate our approach, we annotate BEHAVE dataset with text descriptions. Experimental results demonstrate that our approach is able to produce realistic HOIs with various interactions and different types of objects.
The MI-Motion Dataset and Benchmark for 3D Multi-Person Motion Prediction
Jun 26, 2023



3D multi-person motion prediction is a challenging task that involves modeling individual behaviors and interactions between people. Despite the emergence of approaches for this task, comparing them is difficult due to the lack of standardized training settings and benchmark datasets. In this paper, we introduce the Multi-Person Interaction Motion (MI-Motion) Dataset, which includes skeleton sequences of multiple individuals collected by motion capture systems and refined and synthesized using a game engine. The dataset contains 167k frames of interacting people's skeleton poses and is categorized into 5 different activity scenes. To facilitate research in multi-person motion prediction, we also provide benchmarks to evaluate the performance of prediction methods in three settings: short-term, long-term, and ultra-long-term prediction. Additionally, we introduce a novel baseline approach that leverages graph and temporal convolutional networks, which has demonstrated competitive results in multi-person motion prediction. We believe that the proposed MI-Motion benchmark dataset and baseline will facilitate future research in this area, ultimately leading to better understanding and modeling of multi-person interactions.
Learning Weakly Supervised Audio-Visual Violence Detection in Hyperbolic Space
Jun 02, 2023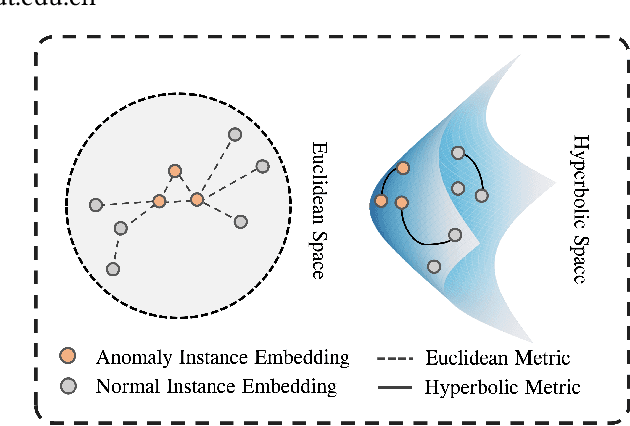
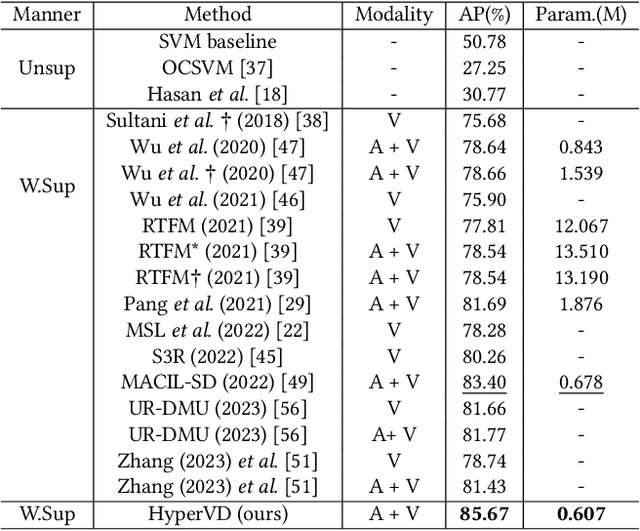
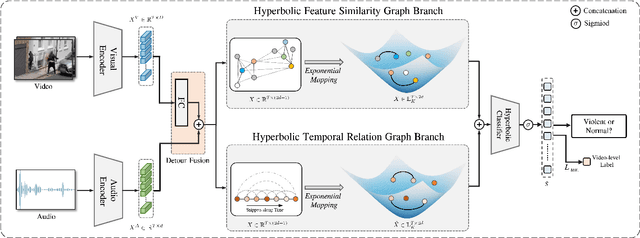
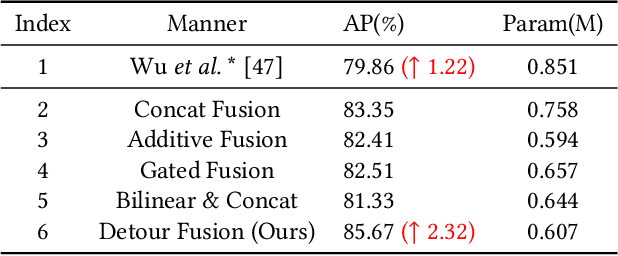
In recent years, the task of weakly supervised audio-visual violence detection has gained considerable attention. The goal of this task is to identify violent segments within multimodal data based on video-level labels. Despite advances in this field, traditional Euclidean neural networks, which have been used in prior research, encounter difficulties in capturing highly discriminative representations due to limitations of the feature space. To overcome this, we propose HyperVD, a novel framework that learns snippet embeddings in hyperbolic space to improve model discrimination. Our framework comprises a detour fusion module for multimodal fusion, effectively alleviating modality inconsistency between audio and visual signals. Additionally, we contribute two branches of fully hyperbolic graph convolutional networks that excavate feature similarities and temporal relationships among snippets in hyperbolic space. By learning snippet representations in this space, the framework effectively learns semantic discrepancies between violent and normal events. Extensive experiments on the XD-Violence benchmark demonstrate that our method outperforms state-of-the-art methods by a sizable margin.
Trajectory-Aware Body Interaction Transformer for Multi-Person Pose Forecasting
Mar 13, 2023



Multi-person pose forecasting remains a challenging problem, especially in modeling fine-grained human body interaction in complex crowd scenarios. Existing methods typically represent the whole pose sequence as a temporal series, yet overlook interactive influences among people based on skeletal body parts. In this paper, we propose a novel Trajectory-Aware Body Interaction Transformer (TBIFormer) for multi-person pose forecasting via effectively modeling body part interactions. Specifically, we construct a Temporal Body Partition Module that transforms all the pose sequences into a Multi-Person Body-Part sequence to retain spatial and temporal information based on body semantics. Then, we devise a Social Body Interaction Self-Attention (SBI-MSA) module, utilizing the transformed sequence to learn body part dynamics for inter- and intra-individual interactions. Furthermore, different from prior Euclidean distance-based spatial encodings, we present a novel and efficient Trajectory-Aware Relative Position Encoding for SBI-MSA to offer discriminative spatial information and additional interactive clues. On both short- and long-term horizons, we empirically evaluate our framework on CMU-Mocap, MuPoTS-3D as well as synthesized datasets (6 ~ 10 persons), and demonstrate that our method greatly outperforms the state-of-the-art methods. Code will be made publicly available upon acceptance.
PointCMC: Cross-Modal Multi-Scale Correspondences Learning for Point Cloud Understanding
Nov 23, 2022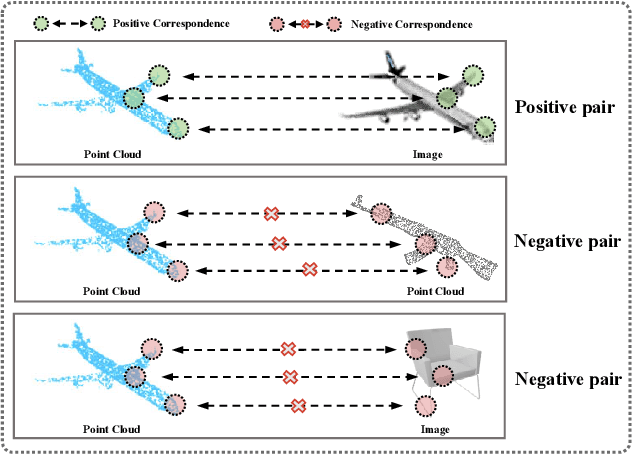
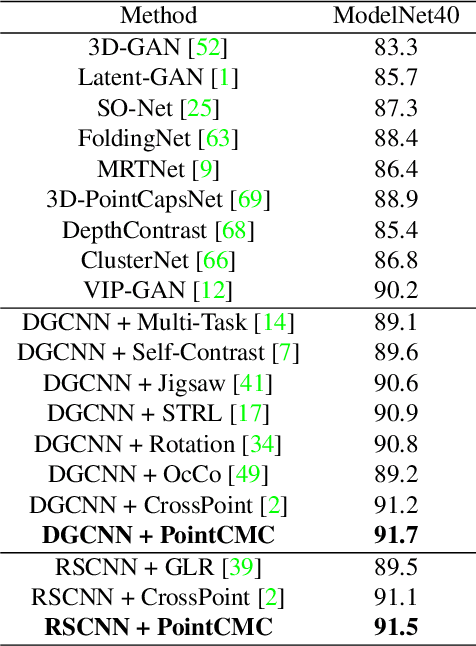
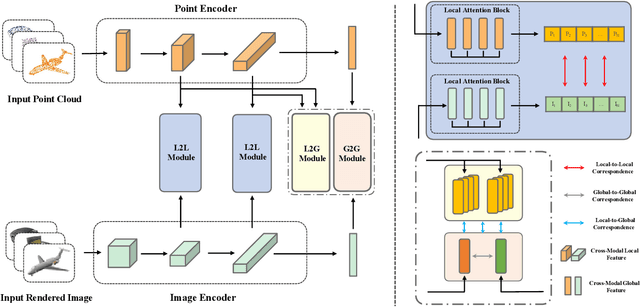
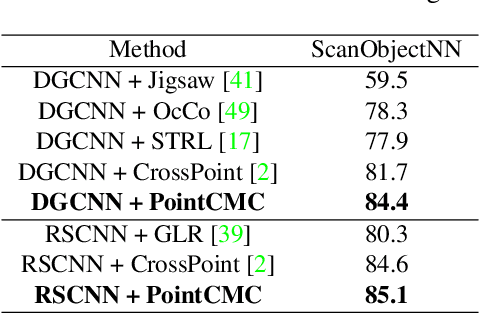
Some self-supervised cross-modal learning approaches have recently demonstrated the potential of image signals for enhancing point cloud representation. However, it remains a question on how to directly model cross-modal local and global correspondences in a self-supervised fashion. To solve it, we proposed PointCMC, a novel cross-modal method to model multi-scale correspondences across modalities for self-supervised point cloud representation learning. In particular, PointCMC is composed of: (1) a local-to-local (L2L) module that learns local correspondences through optimized cross-modal local geometric features, (2) a local-to-global (L2G) module that aims to learn the correspondences between local and global features across modalities via local-global discrimination, and (3) a global-to-global (G2G) module, which leverages auxiliary global contrastive loss between the point cloud and image to learn high-level semantic correspondences. Extensive experiment results show that our approach outperforms existing state-of-the-art methods in various downstream tasks such as 3D object classification and segmentation. Code will be made publicly available upon acceptance.
SoMoFormer: Social-Aware Motion Transformer for Multi-Person Motion Prediction
Aug 19, 2022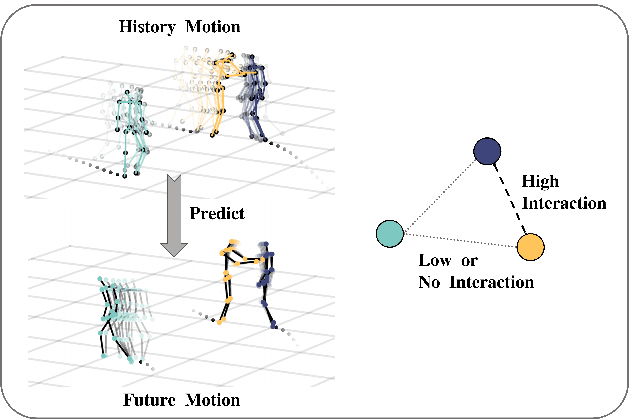
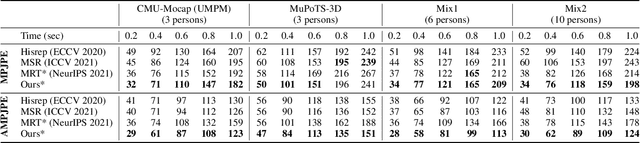
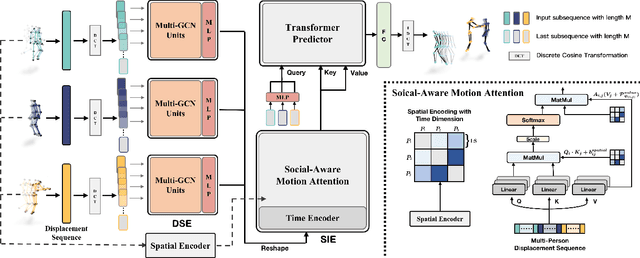
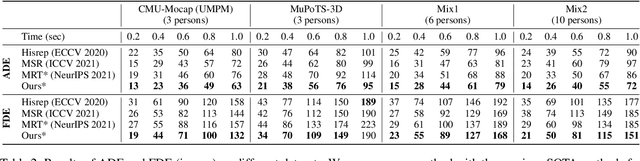
Multi-person motion prediction remains a challenging problem, especially in the joint representation learning of individual motion and social interactions. Most prior methods only involve learning local pose dynamics for individual motion (without global body trajectory) and also struggle to capture complex interaction dependencies for social interactions. In this paper, we propose a novel Social-Aware Motion Transformer (SoMoFormer) to effectively model individual motion and social interactions in a joint manner. Specifically, SoMoFormer extracts motion features from sub-sequences in displacement trajectory space to effectively learn both local and global pose dynamics for each individual. In addition, we devise a novel social-aware motion attention mechanism in SoMoFormer to further optimize dynamics representations and capture interaction dependencies simultaneously via motion similarity calculation across time and social dimensions. On both short- and long-term horizons, we empirically evaluate our framework on multi-person motion datasets and demonstrate that our method greatly outperforms state-of-the-art methods of single- and multi-person motion prediction. Code will be made publicly available upon acceptance.
Upsampling Autoencoder for Self-Supervised Point Cloud Learning
Mar 21, 2022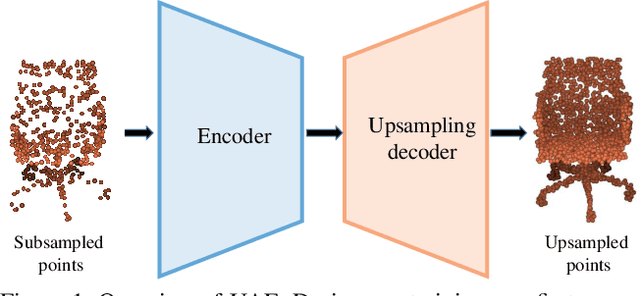
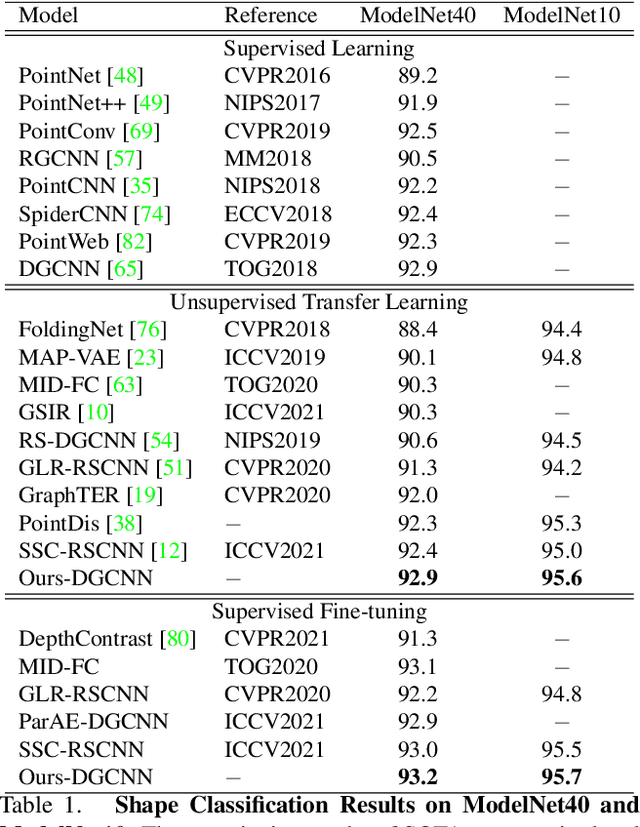
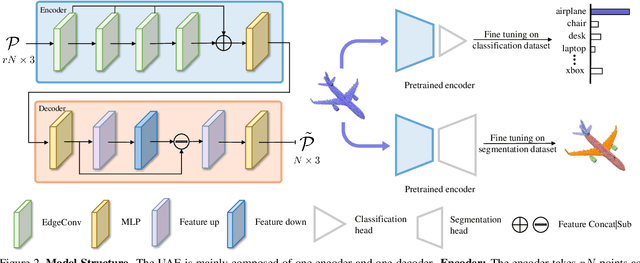
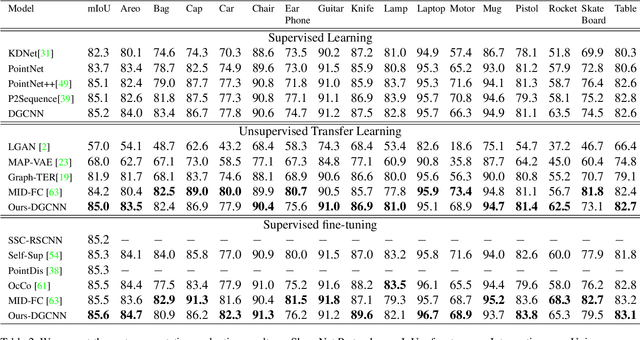
In computer-aided design (CAD) community, the point cloud data is pervasively applied in reverse engineering, where the point cloud analysis plays an important role. While a large number of supervised learning methods have been proposed to handle the unordered point clouds and demonstrated their remarkable success, their performance and applicability are limited to the costly data annotation. In this work, we propose a novel self-supervised pretraining model for point cloud learning without human annotations, which relies solely on upsampling operation to perform feature learning of point cloud in an effective manner. The key premise of our approach is that upsampling operation encourages the network to capture both high-level semantic information and low-level geometric information of the point cloud, thus the downstream tasks such as classification and segmentation will benefit from the pre-trained model. Specifically, our method first conducts the random subsampling from the input point cloud at a low proportion e.g., 12.5%. Then, we feed them into an encoder-decoder architecture, where an encoder is devised to operate only on the subsampled points, along with a upsampling decoder is adopted to reconstruct the original point cloud based on the learned features. Finally, we design a novel joint loss function which enforces the upsampled points to be similar with the original point cloud and uniformly distributed on the underlying shape surface. By adopting the pre-trained encoder weights as initialisation of models for downstream tasks, we find that our UAE outperforms previous state-of-the-art methods in shape classification, part segmentation and point cloud upsampling tasks. Code will be made publicly available upon acceptance.
PatchFormer: An Efficient Point Transformer with Patch Attention
Dec 02, 2021
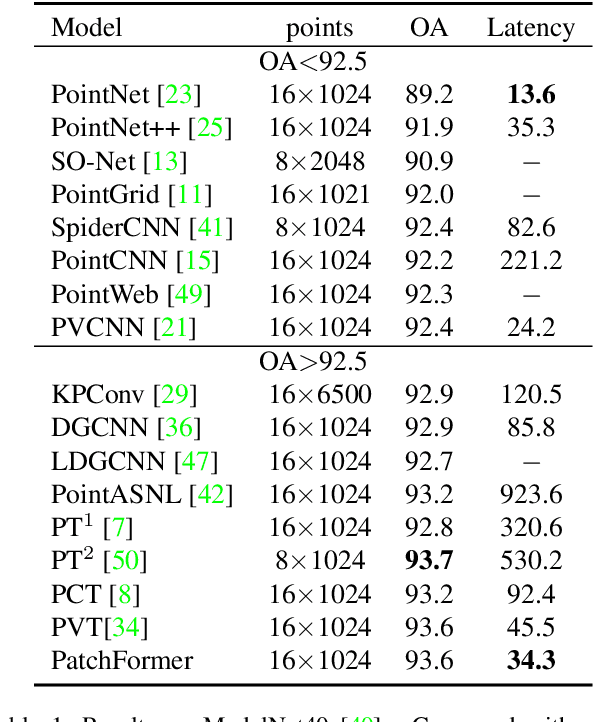
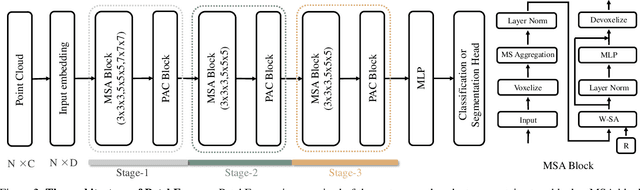
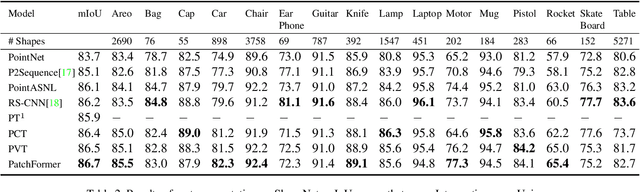
The point cloud learning community is witnesses a modeling shift from CNNs to Transformers, where pure Transformer architectures have achieved top accuracy on the major learning benchmarks. However, existing point Transformers are computationally expensive since they need to generate a large attention map, which has quadratic complexity (both in space and time) with respect to input size. To solve this shortcoming, we introduce Patch attention (PAT) to adaptively learn a much smaller set of bases upon which the attention maps are computed. By a weighted summation upon these bases, PAT not only captures the global shape context but also achieves linear complexity to input size. In addition, we propose a lightweight Multi-scale attention (MST) block to build attentions among features of different scales, providing the model with multi-scale features. Equipped with the PAT and MST, we construct our neural architecture called PatchFormer that integrates both modules into a joint framework for point cloud learning. Extensive experiments demonstrate that our network achieves comparable accuracy on general point cloud learning tasks with 9.2x speed-up than previous point Transformers.
Point-Voxel Transformer: An Efficient Approach To 3D Deep Learning
Aug 13, 2021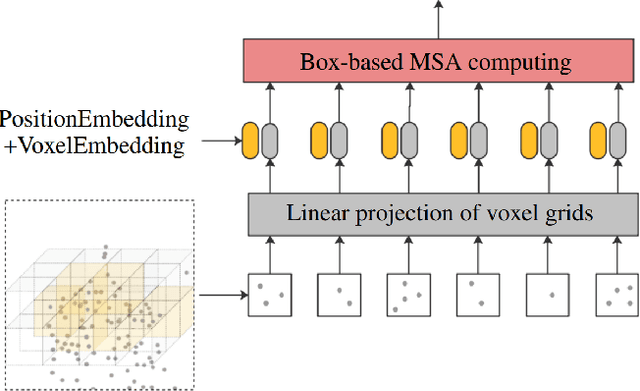
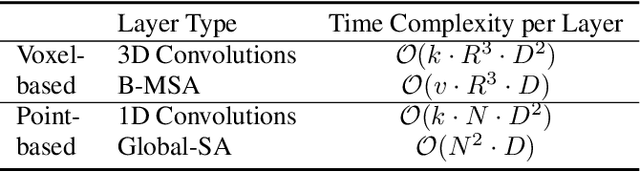
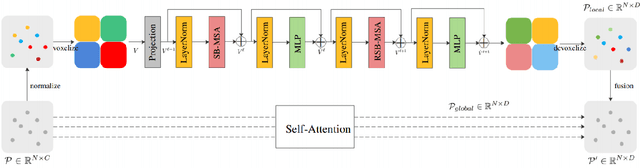
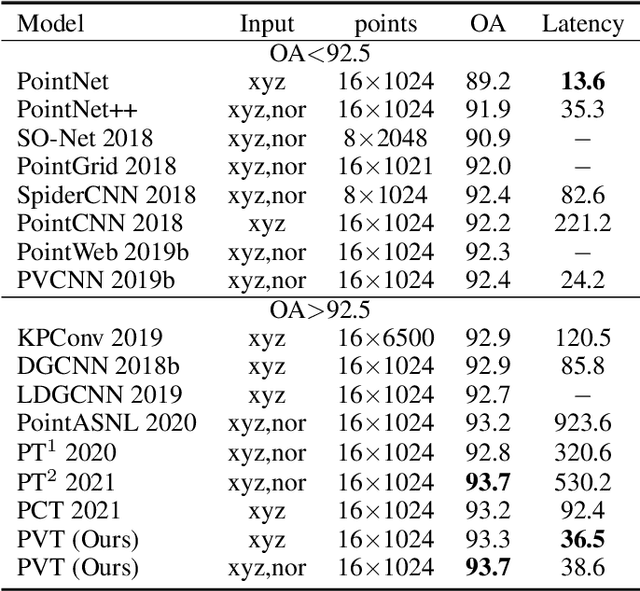
Due to the sparsity and irregularity of the 3D data, approaches that directly process points have become popular. Among all point-based models, Transformer-based models have achieved state-of-the-art performance by fully preserving point interrelation. However, most of them spend high percentage of total time on sparse data accessing (e.g., Farthest Point Sampling (FPS) and neighbor points query), which becomes the computation burden. Therefore, we present a novel 3D Transformer, called Point-Voxel Transformer (PVT) that leverages self-attention computation in points to gather global context features, while performing multi-head self-attention (MSA) computation in voxels to capture local information and reduce the irregular data access. Additionally, to further reduce the cost of MSA computation, we design a cyclic shifted boxing scheme which brings greater efficiency by limiting the MSA computation to non-overlapping local boxes while also preserving cross-box connection. Our method fully exploits the potentials of Transformer architecture, paving the road to efficient and accurate recognition results. Evaluated on classification and segmentation benchmarks, our PVT not only achieves strong accuracy but outperforms previous state-of-the-art Transformer-based models with 9x measured speedup on average. For 3D object detection task, we replace the primitives in Frustrum PointNet with PVT layer and achieve the improvement of 8.6%.