 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOCMG-Net: Neural Oriented Normal Refinement for Unstructured Point Clouds
Sep 02, 2024We present a robust refinement method for estimating oriented normals from unstructured point clouds. In contrast to previous approaches that either suffer from high computational complexity or fail to achieve desirable accuracy, our novel framework incorporates sign orientation and data augmentation in the feature space to refine the initial oriented normals, striking a balance between efficiency and accuracy. To address the issue of noise-caused direction inconsistency existing in previous approaches, we introduce a new metric called the Chamfer Normal Distance, which faithfully minimizes the estimation error by correcting the annotated normal with the closest point found on the potentially clean point cloud. This metric not only tackles the challenge but also aids in network training and significantly enhances network robustness against noise. Moreover, we propose an innovative dual-parallel architecture that integrates Multi-scale Local Feature Aggregation and Hierarchical Geometric Information Fusion, which enables the network to capture intricate geometric details more effectively and notably reduces ambiguity in scale selection. Extensive experiments demonstrate the superiority and versatility of our method in both unoriented and oriented normal estimation tasks across synthetic and real-world datasets among indoor and outdoor scenarios. The code is available at https://github.com/YingruiWoo/OCMG-Net.git.
CMG-Net: Robust Normal Estimation for Point Clouds via Chamfer Normal Distance and Multi-scale Geometry
Dec 14, 2023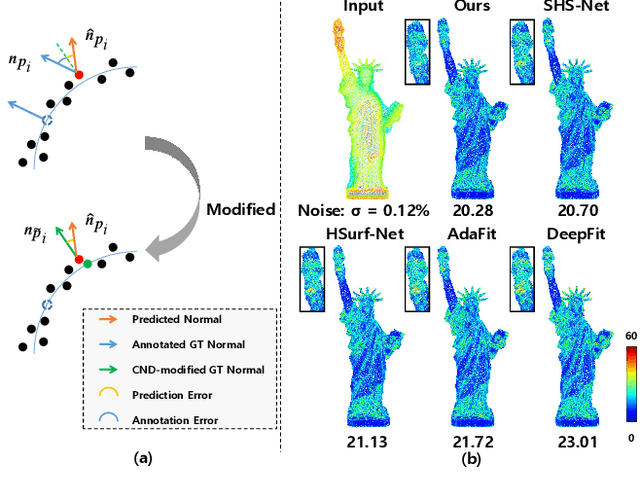
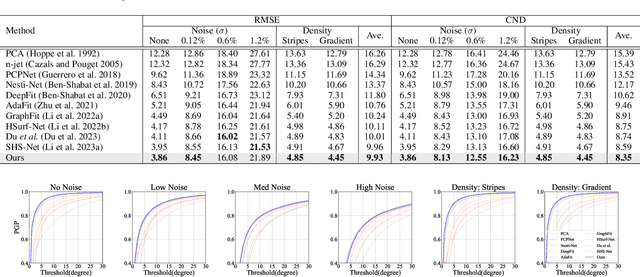
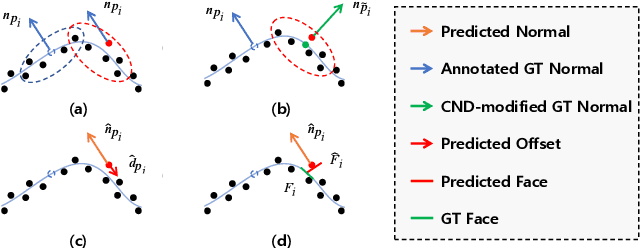
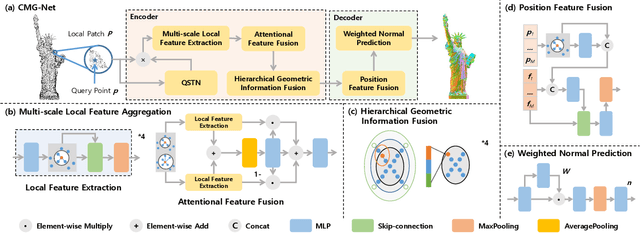
This work presents an accurate and robust method for estimating normals from point clouds. In contrast to predecessor approaches that minimize the deviations between the annotated and the predicted normals directly, leading to direction inconsistency, we first propose a new metric termed Chamfer Normal Distance to address this issue. This not only mitigates the challenge but also facilitates network training and substantially enhances the network robustness against noise. Subsequently, we devise an innovative architecture that encompasses Multi-scale Local Feature Aggregation and Hierarchical Geometric Information Fusion. This design empowers the network to capture intricate geometric details more effectively and alleviate the ambiguity in scale selection. Extensive experiments demonstrate that our method achieves the state-of-the-art performance on both synthetic and real-world datasets, particularly in scenarios contaminated by noise. Our implementation is available at https://github.com/YingruiWoo/CMG-Net_Pytorch.