 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMEM: Multi-Scale Embodied Memory for Vision Language Action Models
Mar 04, 2026Conventionally, memory in end-to-end robotic learning involves inputting a sequence of past observations into the learned policy. However, in complex multi-stage real-world tasks, the robot's memory must represent past events at multiple levels of granularity: from long-term memory that captures abstracted semantic concepts (e.g., a robot cooking dinner should remember which stages of the recipe are already done) to short-term memory that captures recent events and compensates for occlusions (e.g., a robot remembering the object it wants to pick up once its arm occludes it). In this work, our main insight is that an effective memory architecture for long-horizon robotic control should combine multiple modalities to capture these different levels of abstraction. We introduce Multi-Scale Embodied Memory (MEM), an approach for mixed-modal long-horizon memory in robot policies. MEM combines video-based short-horizon memory, compressed via a video encoder, with text-based long-horizon memory. Together, they enable robot policies to perform tasks that span up to fifteen minutes, like cleaning up a kitchen, or preparing a grilled cheese sandwich. Additionally, we find that memory enables MEM policies to intelligently adapt manipulation strategies in-context.
Knowledge Insulating Vision-Language-Action Models: Train Fast, Run Fast, Generalize Better
May 29, 2025Vision-language-action (VLA) models provide a powerful approach to training control policies for physical systems, such as robots, by combining end-to-end learning with transfer of semantic knowledge from web-scale vision-language model (VLM) training. However, the constraints of real-time control are often at odds with the design of VLMs: the most powerful VLMs have tens or hundreds of billions of parameters, presenting an obstacle to real-time inference, and operate on discrete tokens rather than the continuous-valued outputs that are required for controlling robots. To address this challenge, recent VLA models have used specialized modules for efficient continuous control, such as action experts or continuous output heads, which typically require adding new untrained parameters to the pretrained VLM backbone. While these modules improve real-time and control capabilities, it remains an open question whether they preserve or degrade the semantic knowledge contained in the pretrained VLM, and what effect they have on the VLA training dynamics. In this paper, we study this question in the context of VLAs that include a continuous diffusion or flow matching action expert, showing that naively including such experts significantly harms both training speed and knowledge transfer. We provide an extensive analysis of various design choices, their impact on performance and knowledge transfer, and propose a technique for insulating the VLM backbone during VLA training that mitigates this issue. Videos are available at https://pi.website/research/knowledge_insulation.
$π_{0.5}$: a Vision-Language-Action Model with Open-World Generalization
Apr 22, 2025



In order for robots to be useful, they must perform practically relevant tasks in the real world, outside of the lab. While vision-language-action (VLA) models have demonstrated impressive results for end-to-end robot control, it remains an open question how far such models can generalize in the wild. We describe $\pi_{0.5}$, a new model based on $\pi_{0}$ that uses co-training on heterogeneous tasks to enable broad generalization. $\pi_{0.5}$\ uses data from multiple robots, high-level semantic prediction, web data, and other sources to enable broadly generalizable real-world robotic manipulation. Our system uses a combination of co-training and hybrid multi-modal examples that combine image observations, language commands, object detections, semantic subtask prediction, and low-level actions. Our experiments show that this kind of knowledge transfer is essential for effective generalization, and we demonstrate for the first time that an end-to-end learning-enabled robotic system can perform long-horizon and dexterous manipulation skills, such as cleaning a kitchen or bedroom, in entirely new homes.
Scaling Cross-Embodied Learning: One Policy for Manipulation, Navigation, Locomotion and Aviation
Aug 21, 2024



Modern machine learning systems rely on large datasets to attain broad generalization, and this often poses a challenge in robot learning, where each robotic platform and task might have only a small dataset. By training a single policy across many different kinds of robots, a robot learning method can leverage much broader and more diverse datasets, which in turn can lead to better generalization and robustness. However, training a single policy on multi-robot data is challenging because robots can have widely varying sensors, actuators, and control frequencies. We propose CrossFormer, a scalable and flexible transformer-based policy that can consume data from any embodiment. We train CrossFormer on the largest and most diverse dataset to date, 900K trajectories across 20 different robot embodiments. We demonstrate that the same network weights can control vastly different robots, including single and dual arm manipulation systems, wheeled robots, quadcopters, and quadrupeds. Unlike prior work, our model does not require manual alignment of the observation or action spaces. Extensive experiments in the real world show that our method matches the performance of specialist policies tailored for each embodiment, while also significantly outperforming the prior state of the art in cross-embodiment learning.
Autonomous Improvement of Instruction Following Skills via Foundation Models
Jul 30, 2024


Intelligent instruction-following robots capable of improving from autonomously collected experience have the potential to transform robot learning: instead of collecting costly teleoperated demonstration data, large-scale deployment of fleets of robots can quickly collect larger quantities of autonomous data that can collectively improve their performance. However, autonomous improvement requires solving two key problems: (i) fully automating a scalable data collection procedure that can collect diverse and semantically meaningful robot data and (ii) learning from non-optimal, autonomous data with no human annotations. To this end, we propose a novel approach that addresses these challenges, allowing instruction-following policies to improve from autonomously collected data without human supervision. Our framework leverages vision-language models to collect and evaluate semantically meaningful experiences in new environments, and then utilizes a decomposition of instruction following tasks into (semantic) language-conditioned image generation and (non-semantic) goal reaching, which makes it significantly more practical to improve from this autonomously collected data without any human annotations. We carry out extensive experiments in the real world to demonstrate the effectiveness of our approach, and find that in a suite of unseen environments, the robot policy can be improved significantly with autonomously collected data. We open-source the code for our semantic autonomous improvement pipeline, as well as our autonomous dataset of 30.5K trajectories collected across five tabletop environments.
Octo: An Open-Source Generalist Robot Policy
May 20, 2024



Large policies pretrained on diverse robot datasets have the potential to transform robotic learning: instead of training new policies from scratch, such generalist robot policies may be finetuned with only a little in-domain data, yet generalize broadly. However, to be widely applicable across a range of robotic learning scenarios, environments, and tasks, such policies need to handle diverse sensors and action spaces, accommodate a variety of commonly used robotic platforms, and finetune readily and efficiently to new domains. In this work, we aim to lay the groundwork for developing open-source, widely applicable, generalist policies for robotic manipulation. As a first step, we introduce Octo, a large transformer-based policy trained on 800k trajectories from the Open X-Embodiment dataset, the largest robot manipulation dataset to date. It can be instructed via language commands or goal images and can be effectively finetuned to robot setups with new sensory inputs and action spaces within a few hours on standard consumer GPUs. In experiments across 9 robotic platforms, we demonstrate that Octo serves as a versatile policy initialization that can be effectively finetuned to new observation and action spaces. We also perform detailed ablations of design decisions for the Octo model, from architecture to training data, to guide future research on building generalist robot models.
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
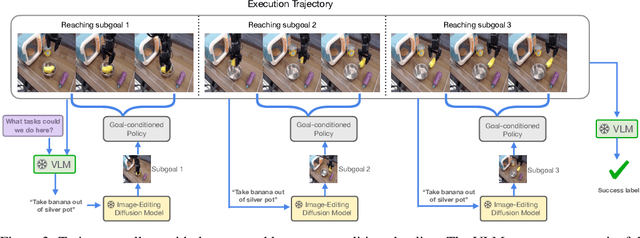
Zero-Shot Robotic Manipulation with Pretrained Image-Editing Diffusion Models
Oct 16, 2023If generalist robots are to operate in truly unstructured environments, they need to be able to recognize and reason about novel objects and scenarios. Such objects and scenarios might not be present in the robot's own training data. We propose SuSIE, a method that leverages an image-editing diffusion model to act as a high-level planner by proposing intermediate subgoals that a low-level controller can accomplish. Specifically, we finetune InstructPix2Pix on video data, consisting of both human videos and robot rollouts, such that it outputs hypothetical future "subgoal" observations given the robot's current observation and a language command. We also use the robot data to train a low-level goal-conditioned policy to act as the aforementioned low-level controller. We find that the high-level subgoal predictions can utilize Internet-scale pretraining and visual understanding to guide the low-level goal-conditioned policy, achieving significantly better generalization and precision than conventional language-conditioned policies. We achieve state-of-the-art results on the CALVIN benchmark, and also demonstrate robust generalization on real-world manipulation tasks, beating strong baselines that have access to privileged information or that utilize orders of magnitude more compute and training data. The project website can be found at http://rail-berkeley.github.io/susie .
BridgeData V2: A Dataset for Robot Learning at Scale
Aug 24, 2023We introduce BridgeData V2, a large and diverse dataset of robotic manipulation behaviors designed to facilitate research on scalable robot learning. BridgeData V2 contains 60,096 trajectories collected across 24 environments on a publicly available low-cost robot. BridgeData V2 provides extensive task and environment variability, leading to skills that can generalize across environments, domains, and institutions, making the dataset a useful resource for a broad range of researchers. Additionally, the dataset is compatible with a wide variety of open-vocabulary, multi-task learning methods conditioned on goal images or natural language instructions. In our experiments, we train 6 state-of-the-art imitation learning and offline reinforcement learning methods on our dataset, and find that they succeed on a suite of tasks requiring varying amounts of generalization. We also demonstrate that the performance of these methods improves with more data and higher capacity models, and that training on a greater variety of skills leads to improved generalization. By publicly sharing BridgeData V2 and our pre-trained models, we aim to accelerate research in scalable robot learning methods. Project page at https://rail-berkeley.github.io/bridgedata
Goal Representations for Instruction Following: A Semi-Supervised Language Interface to Control
Jun 30, 2023



Our goal is for robots to follow natural language instructions like "put the towel next to the microwave." But getting large amounts of labeled data, i.e. data that contains demonstrations of tasks labeled with the language instruction, is prohibitive. In contrast, obtaining policies that respond to image goals is much easier, because any autonomous trial or demonstration can be labeled in hindsight with its final state as the goal. In this work, we contribute a method that taps into joint image- and goal- conditioned policies with language using only a small amount of language data. Prior work has made progress on this using vision-language models or by jointly training language-goal-conditioned policies, but so far neither method has scaled effectively to real-world robot tasks without significant human annotation. Our method achieves robust performance in the real world by learning an embedding from the labeled data that aligns language not to the goal image, but rather to the desired change between the start and goal images that the instruction corresponds to. We then train a policy on this embedding: the policy benefits from all the unlabeled data, but the aligned embedding provides an interface for language to steer the policy. We show instruction following across a variety of manipulation tasks in different scenes, with generalization to language instructions outside of the labeled data. Videos and code for our approach can be found on our website: http://tiny.cc/grif .