 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransitive RL: Value Learning via Divide and Conquer
Oct 26, 2025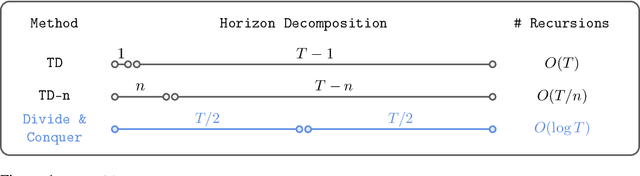
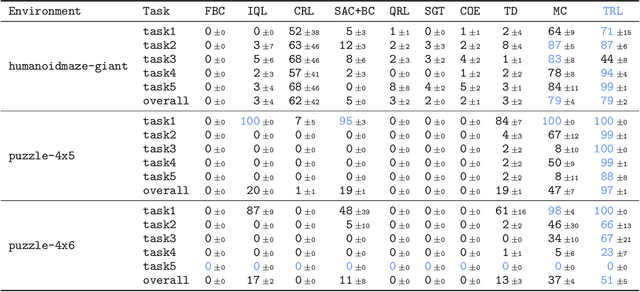
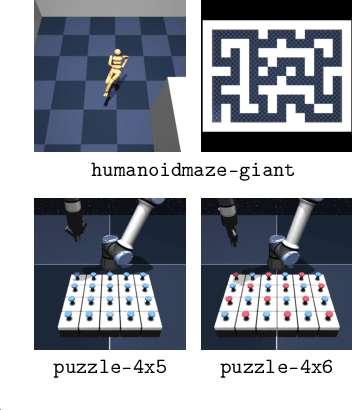
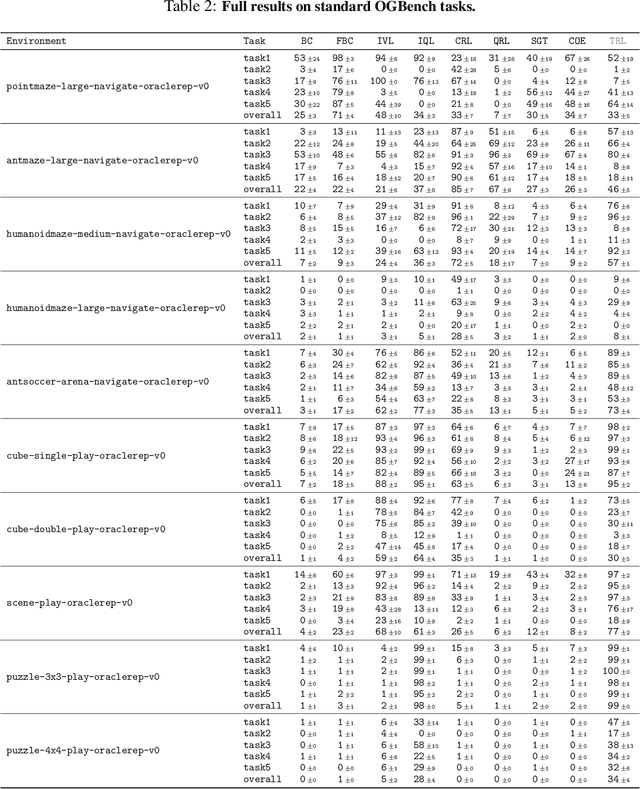
In this work, we present Transitive Reinforcement Learning (TRL), a new value learning algorithm based on a divide-and-conquer paradigm. TRL is designed for offline goal-conditioned reinforcement learning (GCRL) problems, where the aim is to find a policy that can reach any state from any other state in the smallest number of steps. TRL converts a triangle inequality structure present in GCRL into a practical divide-and-conquer value update rule. This has several advantages compared to alternative value learning paradigms. Compared to temporal difference (TD) methods, TRL suffers less from bias accumulation, as in principle it only requires $O(\log T)$ recursions (as opposed to $O(T)$ in TD learning) to handle a length-$T$ trajectory. Unlike Monte Carlo methods, TRL suffers less from high variance as it performs dynamic programming. Experimentally, we show that TRL achieves the best performance in highly challenging, long-horizon benchmark tasks compared to previous offline GCRL algorithms.
AutoEval: Autonomous Evaluation of Generalist Robot Manipulation Policies in the Real World
Mar 31, 2025Scalable and reproducible policy evaluation has been a long-standing challenge in robot learning. Evaluations are critical to assess progress and build better policies, but evaluation in the real world, especially at a scale that would provide statistically reliable results, is costly in terms of human time and hard to obtain. Evaluation of increasingly generalist robot policies requires an increasingly diverse repertoire of evaluation environments, making the evaluation bottleneck even more pronounced. To make real-world evaluation of robotic policies more practical, we propose AutoEval, a system to autonomously evaluate generalist robot policies around the clock with minimal human intervention. Users interact with AutoEval by submitting evaluation jobs to the AutoEval queue, much like how software jobs are submitted with a cluster scheduling system, and AutoEval will schedule the policies for evaluation within a framework supplying automatic success detection and automatic scene resets. We show that AutoEval can nearly fully eliminate human involvement in the evaluation process, permitting around the clock evaluations, and the evaluation results correspond closely to ground truth evaluations conducted by hand. To facilitate the evaluation of generalist policies in the robotics community, we provide public access to multiple AutoEval scenes in the popular BridgeData robot setup with WidowX robot arms. In the future, we hope that AutoEval scenes can be set up across institutions to form a diverse and distributed evaluation network.
Autonomous Improvement of Instruction Following Skills via Foundation Models
Jul 30, 2024


Intelligent instruction-following robots capable of improving from autonomously collected experience have the potential to transform robot learning: instead of collecting costly teleoperated demonstration data, large-scale deployment of fleets of robots can quickly collect larger quantities of autonomous data that can collectively improve their performance. However, autonomous improvement requires solving two key problems: (i) fully automating a scalable data collection procedure that can collect diverse and semantically meaningful robot data and (ii) learning from non-optimal, autonomous data with no human annotations. To this end, we propose a novel approach that addresses these challenges, allowing instruction-following policies to improve from autonomously collected data without human supervision. Our framework leverages vision-language models to collect and evaluate semantically meaningful experiences in new environments, and then utilizes a decomposition of instruction following tasks into (semantic) language-conditioned image generation and (non-semantic) goal reaching, which makes it significantly more practical to improve from this autonomously collected data without any human annotations. We carry out extensive experiments in the real world to demonstrate the effectiveness of our approach, and find that in a suite of unseen environments, the robot policy can be improved significantly with autonomously collected data. We open-source the code for our semantic autonomous improvement pipeline, as well as our autonomous dataset of 30.5K trajectories collected across five tabletop environments.
Crafting In-context Examples according to LMs' Parametric Knowledge
Nov 16, 2023In-context learning has been applied to knowledge-rich tasks such as question answering. In such scenarios, in-context examples are used to trigger a behaviour in the language model: namely, it should surface information stored in its parametric knowledge. We study the construction of in-context example sets, with a focus on the parametric knowledge of the model regarding in-context examples. We identify 'known' examples, where models can correctly answer from its parametric knowledge, and 'unknown' ones. Our experiments show that prompting with 'unknown' examples decreases the performance, potentially as it encourages hallucination rather than searching its parametric knowledge. Constructing an in-context example set that presents both known and unknown information performs the best across diverse settings. We perform analysis on three multi-answer question answering datasets, which allows us to further study answer set ordering strategies based on the LM's knowledge about each answer. Together, our study sheds lights on how to best construct in-context example sets for knowledge-rich tasks.
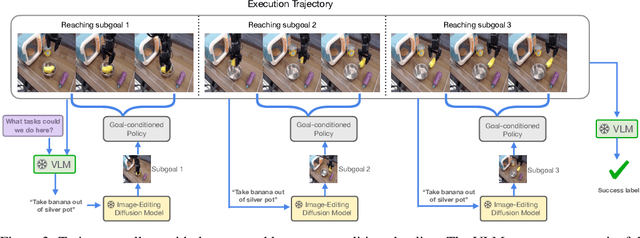
Zero-Shot Robotic Manipulation with Pretrained Image-Editing Diffusion Models
Oct 16, 2023If generalist robots are to operate in truly unstructured environments, they need to be able to recognize and reason about novel objects and scenarios. Such objects and scenarios might not be present in the robot's own training data. We propose SuSIE, a method that leverages an image-editing diffusion model to act as a high-level planner by proposing intermediate subgoals that a low-level controller can accomplish. Specifically, we finetune InstructPix2Pix on video data, consisting of both human videos and robot rollouts, such that it outputs hypothetical future "subgoal" observations given the robot's current observation and a language command. We also use the robot data to train a low-level goal-conditioned policy to act as the aforementioned low-level controller. We find that the high-level subgoal predictions can utilize Internet-scale pretraining and visual understanding to guide the low-level goal-conditioned policy, achieving significantly better generalization and precision than conventional language-conditioned policies. We achieve state-of-the-art results on the CALVIN benchmark, and also demonstrate robust generalization on real-world manipulation tasks, beating strong baselines that have access to privileged information or that utilize orders of magnitude more compute and training data. The project website can be found at http://rail-berkeley.github.io/susie .
High-Speed Accurate Robot Control using Learned Forward Kinodynamics and Non-linear Least Squares Optimization
Jun 16, 2022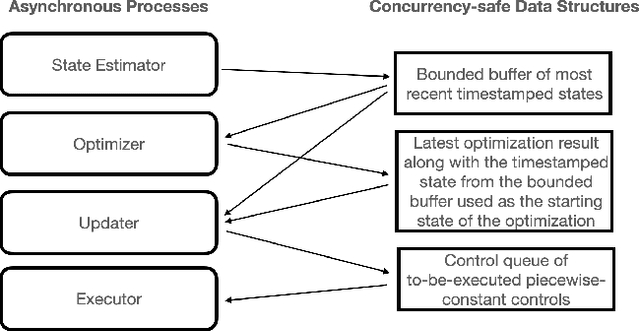
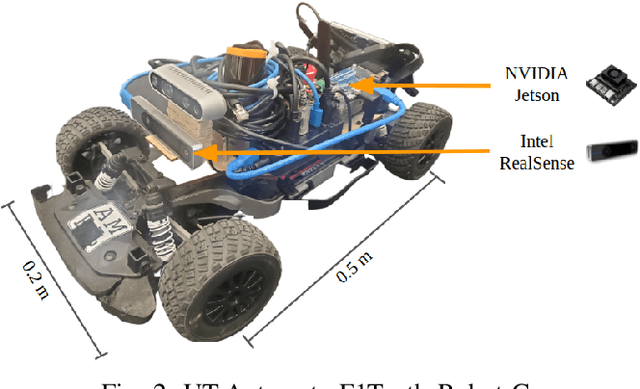
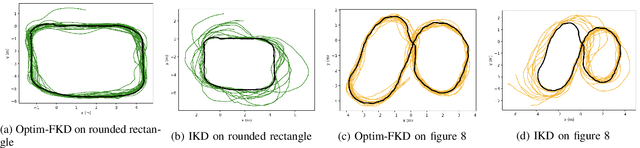
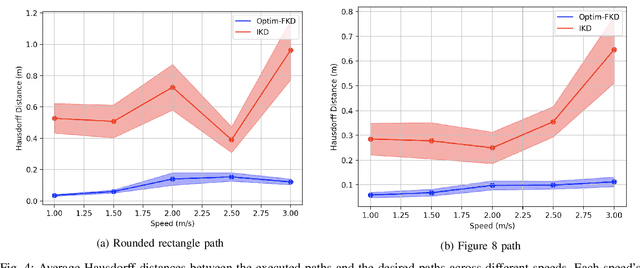
Accurate control of robots in the real world requires a control system that is capable of taking into account the kinodynamic interactions of the robot with its environment. At high speeds, the dependence of the movement of the robot on these kinodynamic interactions becomes more pronounced, making high-speed, accurate robot control a challenging problem. Previous work has shown that learning the inverse kinodynamics (IKD) of the robot can be helpful for high-speed robot control. However a learned inverse kinodynamic model can only be applied to a limited class of control problems, and different control problems require the learning of a new IKD model. In this work we present a new formulation for accurate, high-speed robot control that makes use of a learned forward kinodynamic (FKD) model and non-linear least squares optimization. By nature of the formulation, this approach is extensible to a wide array of control problems without requiring the retraining of a new model. We demonstrate the ability of this approach to accurately control a scale one-tenth robot car at high speeds, and show improved results over baselines.
State Supervised Steering Function for Sampling-based Kinodynamic Planning
Jun 15, 2022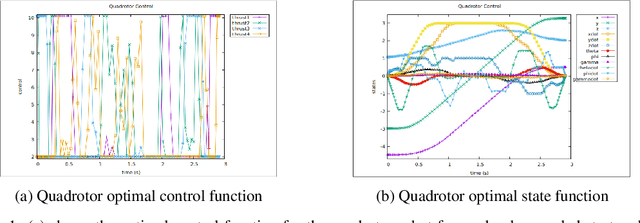
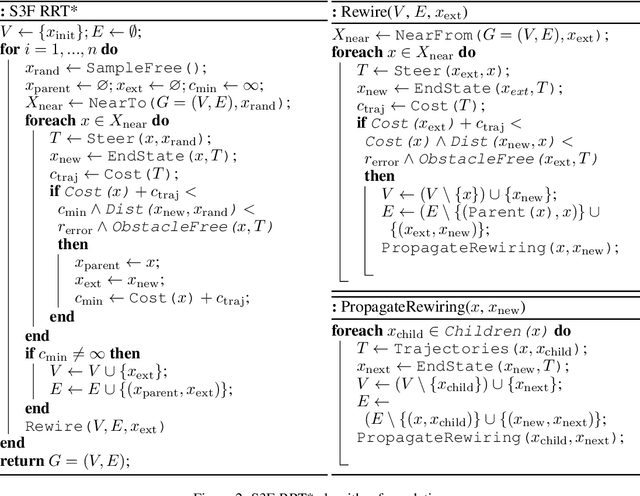
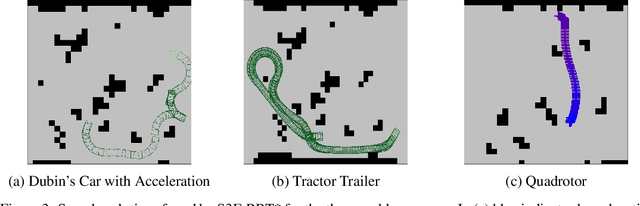
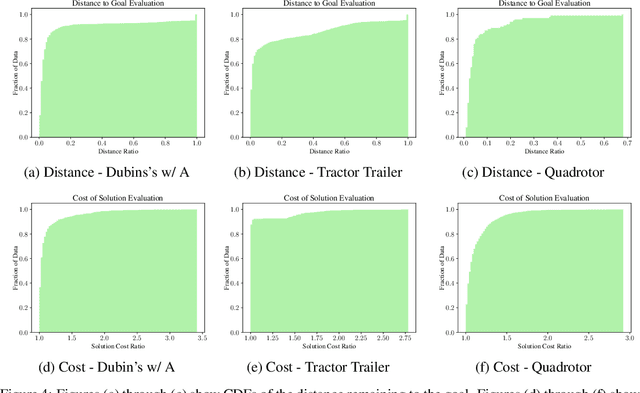
Sampling-based motion planners such as RRT* and BIT*, when applied to kinodynamic motion planning, rely on steering functions to generate time-optimal solutions connecting sampled states. Implementing exact steering functions requires either analytical solutions to the time-optimal control problem, or nonlinear programming (NLP) solvers to solve the boundary value problem given the system's kinodynamic equations. Unfortunately, analytical solutions are unavailable for many real-world domains, and NLP solvers are prohibitively computationally expensive, hence fast and optimal kinodynamic motion planning remains an open problem. We provide a solution to this problem by introducing State Supervised Steering Function (S3F), a novel approach to learn time-optimal steering functions. S3F is able to produce near-optimal solutions to the steering function orders of magnitude faster than its NLP counterpart. Experiments conducted on three challenging robot domains show that RRT* using S3F significantly outperforms state-of-the-art planning approaches on both solution cost and runtime. We further provide a proof of probabilistic completeness of RRT* modified to use S3F.
VI-IKD: High-Speed Accurate Off-Road Navigation using Learned Visual-Inertial Inverse Kinodynamics
Mar 30, 2022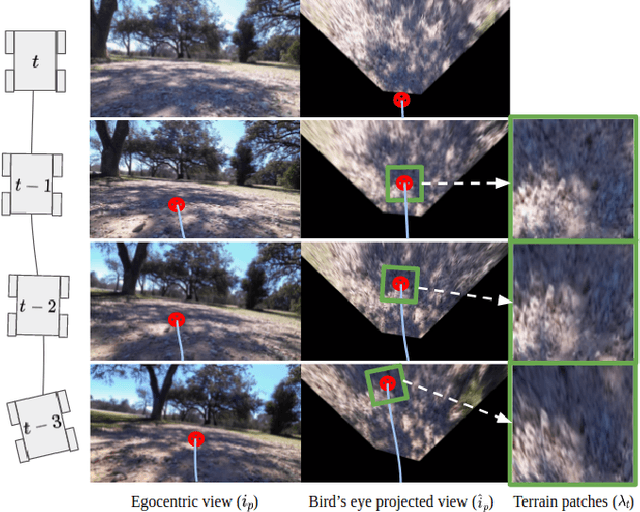
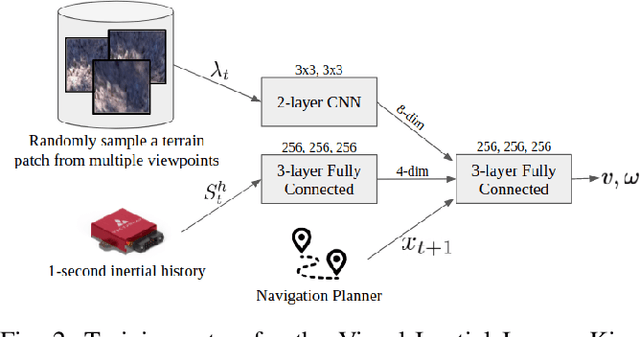
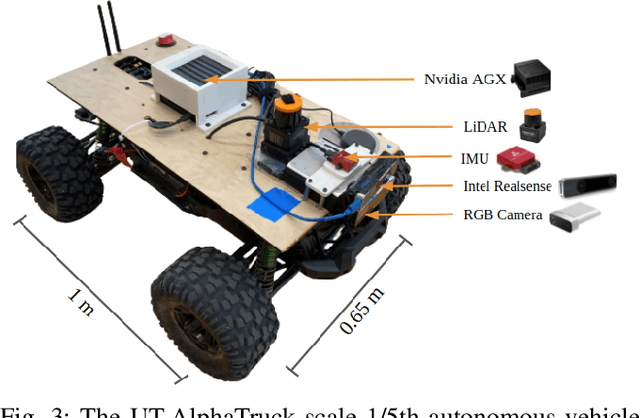
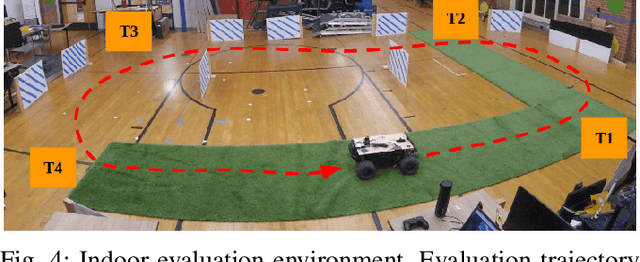
One of the key challenges in high speed off road navigation on ground vehicles is that the kinodynamics of the vehicle terrain interaction can differ dramatically depending on the terrain. Previous approaches to addressing this challenge have considered learning an inverse kinodynamics (IKD) model, conditioned on inertial information of the vehicle to sense the kinodynamic interactions. In this paper, we hypothesize that to enable accurate high-speed off-road navigation using a learned IKD model, in addition to inertial information from the past, one must also anticipate the kinodynamic interactions of the vehicle with the terrain in the future. To this end, we introduce Visual-Inertial Inverse Kinodynamics (VI-IKD), a novel learning based IKD model that is conditioned on visual information from a terrain patch ahead of the robot in addition to past inertial information, enabling it to anticipate kinodynamic interactions in the future. We validate the effectiveness of VI-IKD in accurate high-speed off-road navigation experimentally on a scale 1/5 UT-AlphaTruck off-road autonomous vehicle in both indoor and outdoor environments and show that compared to other state-of-the-art approaches, VI-IKD enables more accurate and robust off-road navigation on a variety of different terrains at speeds of up to 3.5 m/s.