 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-Speed Accurate Robot Control using Learned Forward Kinodynamics and Non-linear Least Squares Optimization
Paper and Code
Jun 16, 2022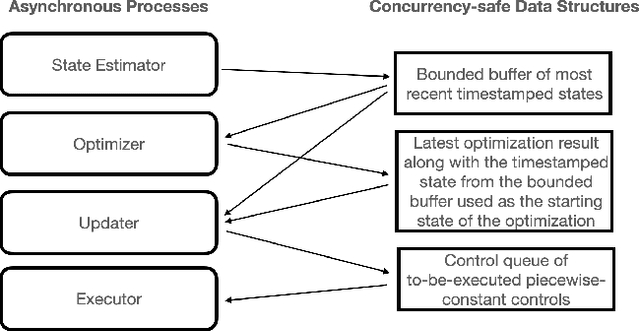
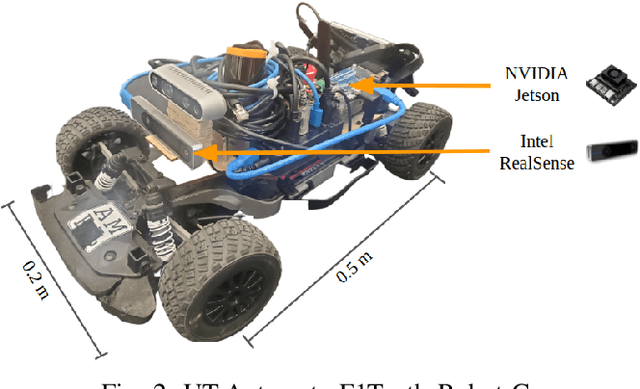
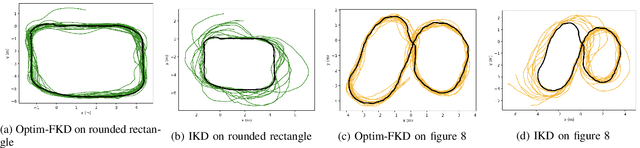
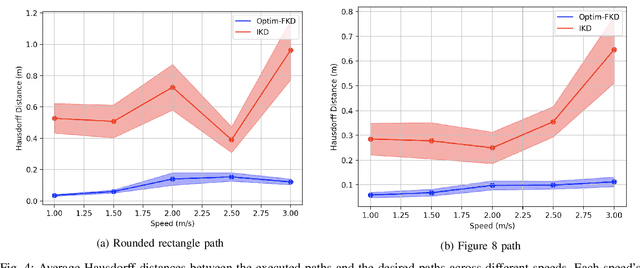
Accurate control of robots in the real world requires a control system that is capable of taking into account the kinodynamic interactions of the robot with its environment. At high speeds, the dependence of the movement of the robot on these kinodynamic interactions becomes more pronounced, making high-speed, accurate robot control a challenging problem. Previous work has shown that learning the inverse kinodynamics (IKD) of the robot can be helpful for high-speed robot control. However a learned inverse kinodynamic model can only be applied to a limited class of control problems, and different control problems require the learning of a new IKD model. In this work we present a new formulation for accurate, high-speed robot control that makes use of a learned forward kinodynamic (FKD) model and non-linear least squares optimization. By nature of the formulation, this approach is extensible to a wide array of control problems without requiring the retraining of a new model. We demonstrate the ability of this approach to accurately control a scale one-tenth robot car at high speeds, and show improved results over baselines.