 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComAgent: Multi-LLM based Agentic AI Empowered Intelligent Wireless Networks
Jan 27, 2026Emerging 6G networks rely on complex cross-layer optimization, yet manually translating high-level intents into mathematical formulations remains a bottleneck. While Large Language Models (LLMs) offer promise, monolithic approaches often lack sufficient domain grounding, constraint awareness, and verification capabilities. To address this, we present ComAgent, a multi-LLM agentic AI framework. ComAgent employs a closed-loop Perception-Planning-Action-Reflection cycle, coordinating specialized agents for literature search, coding, and scoring to autonomously generate solver-ready formulations and reproducible simulations. By iteratively decomposing problems and self-correcting errors, the framework effectively bridges the gap between user intent and execution. Evaluations demonstrate that ComAgent achieves expert-comparable performance in complex beamforming optimization and outperforms monolithic LLMs across diverse wireless tasks, highlighting its potential for automating design in emerging wireless networks.
MimicDreamer: Aligning Human and Robot Demonstrations for Scalable VLA Training
Sep 26, 2025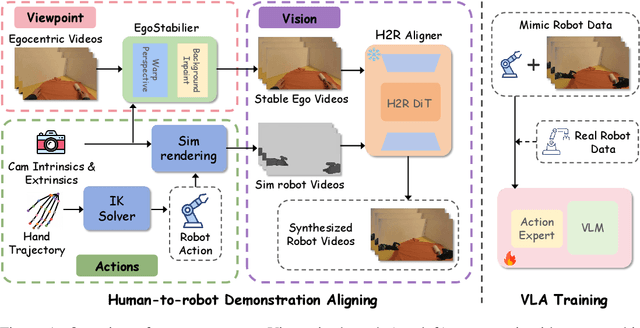

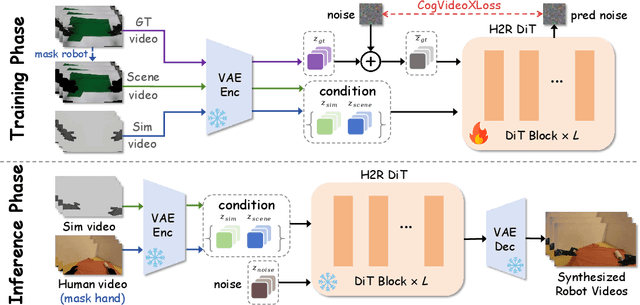
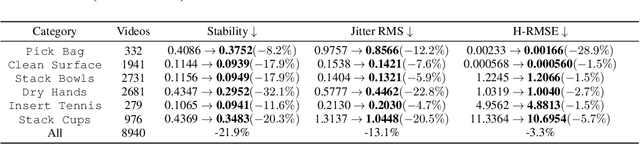
Vision Language Action (VLA) models derive their generalization capability from diverse training data, yet collecting embodied robot interaction data remains prohibitively expensive. In contrast, human demonstration videos are far more scalable and cost-efficient to collect, and recent studies confirm their effectiveness in training VLA models. However, a significant domain gap persists between human videos and robot-executed videos, including unstable camera viewpoints, visual discrepancies between human hands and robotic arms, and differences in motion dynamics. To bridge this gap, we propose MimicDreamer, a framework that turns fast, low-cost human demonstrations into robot-usable supervision by jointly aligning vision, viewpoint, and actions to directly support policy training. For visual alignment, we propose H2R Aligner, a video diffusion model that generates high-fidelity robot demonstration videos by transferring motion from human manipulation footage. For viewpoint stabilization, EgoStabilizer is proposed, which canonicalizes egocentric videos via homography and inpaints occlusions and distortions caused by warping. For action alignment, we map human hand trajectories to the robot frame and apply a constrained inverse kinematics solver to produce feasible, low-jitter joint commands with accurate pose tracking. Empirically, VLA models trained purely on our synthesized human-to-robot videos achieve few-shot execution on real robots. Moreover, scaling training with human data significantly boosts performance compared to models trained solely on real robot data; our approach improves the average success rate by 14.7\% across six representative manipulation tasks.
WonderFree: Enhancing Novel View Quality and Cross-View Consistency for 3D Scene Exploration
Jun 25, 2025Interactive 3D scene generation from a single image has gained significant attention due to its potential to create immersive virtual worlds. However, a key challenge in current 3D generation methods is the limited explorability, which cannot render high-quality images during larger maneuvers beyond the original viewpoint, particularly when attempting to move forward into unseen areas. To address this challenge, we propose WonderFree, the first model that enables users to interactively generate 3D worlds with the freedom to explore from arbitrary angles and directions. Specifically, we decouple this challenge into two key subproblems: novel view quality, which addresses visual artifacts and floating issues in novel views, and cross-view consistency, which ensures spatial consistency across different viewpoints. To enhance rendering quality in novel views, we introduce WorldRestorer, a data-driven video restoration model designed to eliminate floaters and artifacts. In addition, a data collection pipeline is presented to automatically gather training data for WorldRestorer, ensuring it can handle scenes with varying styles needed for 3D scene generation. Furthermore, to improve cross-view consistency, we propose ConsistView, a multi-view joint restoration mechanism that simultaneously restores multiple perspectives while maintaining spatiotemporal coherence. Experimental results demonstrate that WonderFree not only enhances rendering quality across diverse viewpoints but also significantly improves global coherence and consistency. These improvements are confirmed by CLIP-based metrics and a user study showing a 77.20% preference for WonderFree over WonderWorld enabling a seamless and immersive 3D exploration experience. The code, model, and data will be publicly available.
Motion-R1: Chain-of-Thought Reasoning and Reinforcement Learning for Human Motion Generation
Jun 12, 2025Recent advances in large language models, especially in natural language understanding and reasoning, have opened new possibilities for text-to-motion generation. Although existing approaches have made notable progress in semantic alignment and motion synthesis, they often rely on end-to-end mapping strategies that fail to capture deep linguistic structures and logical reasoning. Consequently, generated motions tend to lack controllability, consistency, and diversity. To address these limitations, we propose Motion-R1, a unified motion-language modeling framework that integrates a Chain-of-Thought mechanism. By explicitly decomposing complex textual instructions into logically structured action paths, Motion-R1 provides high-level semantic guidance for motion generation, significantly enhancing the model's ability to interpret and execute multi-step, long-horizon, and compositionally rich commands. To train our model, we adopt Group Relative Policy Optimization, a reinforcement learning algorithm designed for large models, which leverages motion quality feedback to optimize reasoning chains and motion synthesis jointly. Extensive experiments across multiple benchmark datasets demonstrate that Motion-R1 achieves competitive or superior performance compared to state-of-the-art methods, particularly in scenarios requiring nuanced semantic understanding and long-term temporal coherence. The code, model and data will be publicly available.
MIMO Pinching-Antenna-Aided SWIPT
Jun 07, 2025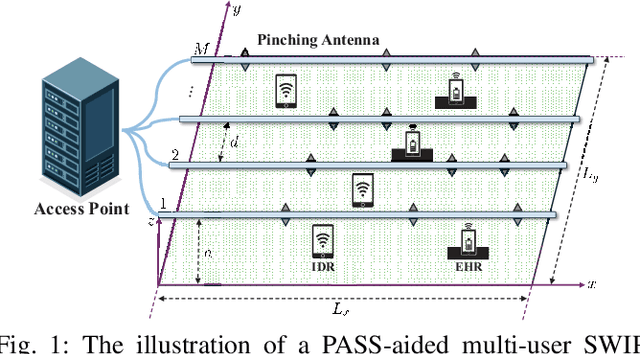
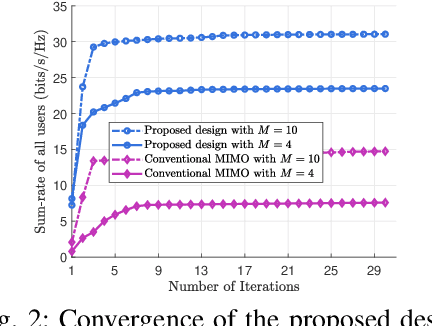
Pinching-antenna systems (PASS) have recently emerged as a promising technology for improving wireless communications by establishing or strengthening reliable line-of-sight (LoS) links by adjusting the positions of pinching antennas (PAs). Motivated by these benefits, we propose a novel PASS-aided multi-input multi-output (MIMO) system for simultaneous wireless information and power transfer (SWIPT), where the PASS are equipped with multiple waveguides to provide information transmission and wireless power transfer (WPT) for several multiple antenna information decoding receivers (IDRs), and energy harvesting receivers (EHRs), respectively. Based on the system, we consider maximizing the sum-rate of all IDRs while guaranteeing the minimum harvested energy of each EHR by jointly optimizing the pinching beamforming and the PA positions. To solve this highly non-convex problem, we iteratively optimize the pinching beamforming based on a weighted minimum mean-squared-error (WMMSE) method and update the PA positions with a Gauss-Seidel-based approach in an alternating optimization (AO) framework. Numerical results verify the significant superiority of the PASS compared with conventional designs.
Joint User Association and Beamforming Design for ISAC Networks with Large Language Models
Jun 05, 2025Integrated sensing and communication (ISAC) has been envisioned to play a more important role in future wireless networks. However, the design of ISAC networks is challenging, especially when there are multiple communication and sensing (C\&S) nodes and multiple sensing targets. We investigate a multi-base station (BS) ISAC network in which multiple BSs equipped with multiple antennas simultaneously provide C\&S services for multiple ground communication users (CUs) and targets. To enhance the overall performance of C\&S, we formulate a joint user association (UA) and multi-BS transmit beamforming optimization problem with the objective of maximizing the total sum rate of all CUs while ensuring both the minimum target detection and parameter estimation requirements. To efficiently solve the highly non-convex mixed integer nonlinear programming (MINLP) optimization problem, we propose an alternating optimization (AO)-based algorithm that decomposes the problem into two sub-problems, i.e., UA optimization and multi-BS transmit beamforming optimization. Inspired by large language models (LLMs) for prediction and inference, we propose a unified framework integrating LLMs with convex-based optimization methods. First, we propose a comprehensive design of prompt engineering, including few-shot, chain of thought, and self-reflection techniques to guide LLMs in solving the binary integer programming UA optimization problem. Second, we utilize convex-based optimization methods to handle the non-convex beamforming optimization problem based on fractional programming (FP), majorization minimization (MM), and the alternating direction method of multipliers (ADMM) with an optimized UA from LLMs. Numerical results demonstrate that our proposed LLM-enabled AO-based algorithm achieves fast convergence and near upper-bound performance with the GPT-o1 model, outperforming various benchmark schemes.
Pinching-Antenna Systems (PASS) Aided Over-the-air Computation
May 12, 2025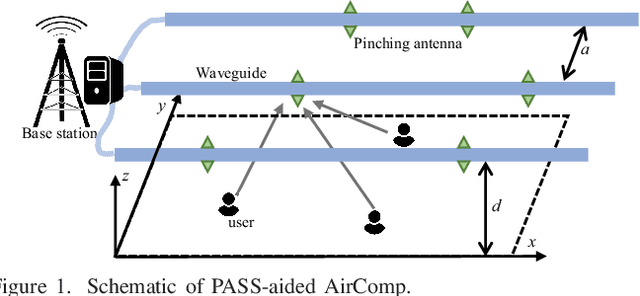
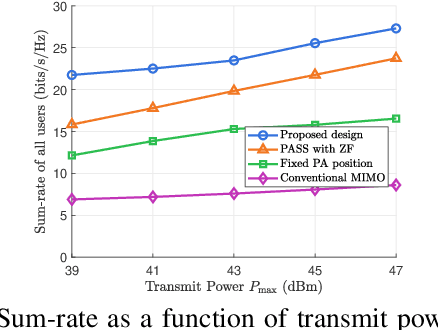
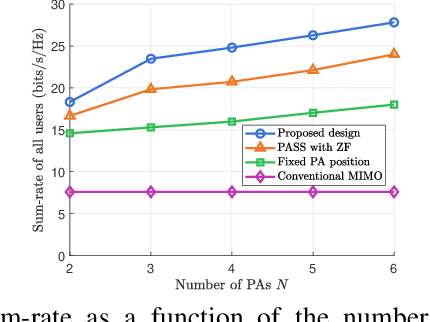
Over-the-air computation (AirComp) enables fast data aggregation for edge intelligence applications. However the performance of AirComp can be severely degraded by channel misalignments. Pinching antenna systems (PASS) have recently emerged as a promising solution for physically reshaping favorable wireless channels to reduce misalignments and thus AirComp errors, via low-cost, fully passive, and highly reconfigurable antenna deployment. Motivated by these benefits, we propose a novel PASS-aided AirComp system that introduces new design degrees of freedom through flexible pinching antenna (PA) placement. To improve performance, we consider a mean squared error (MSE) minimization problem by jointly optimizing the PA position, transmit power, and decoding vector. To solve this highly non-convex problem, we propose an alternating optimization based framework with Gauss-Seidel based PA position updates. Simulation results show that our proposed joint PA position and communication design significantly outperforms various benchmark schemes in AirComp accuracy.
Well2Flow: Reconstruction of reservoir states from sparse wells using score-based generative models
Apr 07, 2025



This study investigates the use of score-based generative models for reservoir simulation, with a focus on reconstructing spatially varying permeability and saturation fields in saline aquifers, inferred from sparse observations at two well locations. By modeling the joint distribution of permeability and saturation derived from high-fidelity reservoir simulations, the proposed neural network is trained to learn the complex spatiotemporal dynamics governing multiphase fluid flow in porous media. During inference, the framework effectively reconstructs both permeability and saturation fields by conditioning on sparse vertical profiles extracted from well log data. This approach introduces a novel methodology for incorporating physical constraints and well log guidance into generative models, significantly enhancing the accuracy and physical plausibility of the reconstructed subsurface states. Furthermore, the framework demonstrates strong generalization capabilities across varying geological scenarios, highlighting its potential for practical deployment in data-scarce reservoir management tasks.
WonderTurbo: Generating Interactive 3D World in 0.72 Seconds
Apr 03, 2025



Interactive 3D generation is gaining momentum and capturing extensive attention for its potential to create immersive virtual experiences. However, a critical challenge in current 3D generation technologies lies in achieving real-time interactivity. To address this issue, we introduce WonderTurbo, the first real-time interactive 3D scene generation framework capable of generating novel perspectives of 3D scenes within 0.72 seconds. Specifically, WonderTurbo accelerates both geometric and appearance modeling in 3D scene generation. In terms of geometry, we propose StepSplat, an innovative method that constructs efficient 3D geometric representations through dynamic updates, each taking only 0.26 seconds. Additionally, we design QuickDepth, a lightweight depth completion module that provides consistent depth input for StepSplat, further enhancing geometric accuracy. For appearance modeling, we develop FastPaint, a 2-steps diffusion model tailored for instant inpainting, which focuses on maintaining spatial appearance consistency. Experimental results demonstrate that WonderTurbo achieves a remarkable 15X speedup compared to baseline methods, while preserving excellent spatial consistency and delivering high-quality output.
Large Language Model Based Multi-Objective Optimization for Integrated Sensing and Communications in UAV Networks
Oct 07, 2024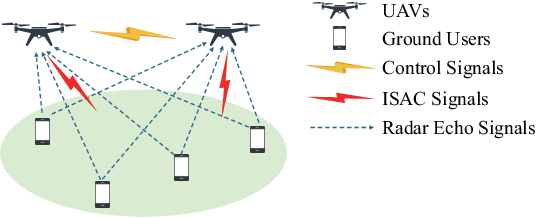
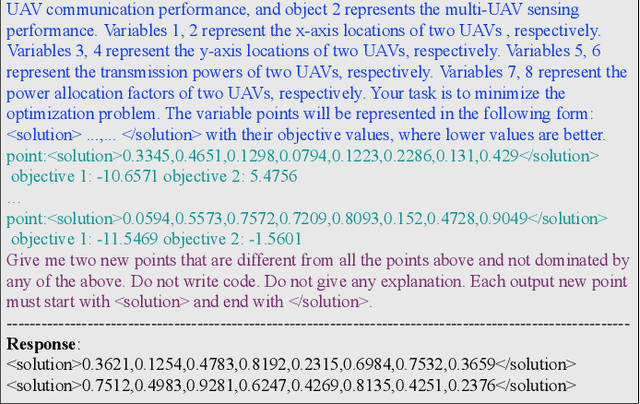


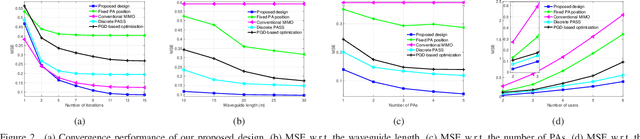
This letter investigates an unmanned aerial vehicle (UAV) network with integrated sensing and communication (ISAC) systems, where multiple UAVs simultaneously sense the locations of ground users and provide communication services with radars. To find the trade-off between communication and sensing (C\&S) in the system, we formulate a multi-objective optimization problem (MOP) to maximize the total network utility and the localization Cram\'er-Rao bounds (CRB) of ground users, which jointly optimizes the deployment and power control of UAVs. Inspired by the huge potential of large language models (LLM) for prediction and inference, we propose an LLM-enabled decomposition-based multi-objective evolutionary algorithm (LEDMA) for solving the highly non-convex MOP. We first adopt a decomposition-based scheme to decompose the MOP into a series of optimization sub-problems. We second integrate LLMs as black-box search operators with MOP-specifically designed prompt engineering into the framework of MOEA to solve optimization sub-problems simultaneously. Numerical results demonstrate that the proposed LEDMA can find the clear trade-off between C\&S and outperforms baseline MOEAs in terms of obtained Pareto fronts and convergence.