 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSuperman: Unifying Skeleton and Vision for Human Motion Perception and Generation
Feb 02, 2026Human motion analysis tasks, such as temporal 3D pose estimation, motion prediction, and motion in-betweening, play an essential role in computer vision. However, current paradigms suffer from severe fragmentation. First, the field is split between ``perception'' models that understand motion from video but only output text, and ``generation'' models that cannot perceive from raw visual input. Second, generative MLLMs are often limited to single-frame, static poses using dense, parametric SMPL models, failing to handle temporal motion. Third, existing motion vocabularies are built from skeleton data alone, severing the link to the visual domain. To address these challenges, we introduce Superman, a unified framework that bridges visual perception with temporal, skeleton-based motion generation. Our solution is twofold. First, to overcome the modality disconnect, we propose a Vision-Guided Motion Tokenizer. Leveraging the natural geometric alignment between 3D skeletons and visual data, this module pioneers robust joint learning from both modalities, creating a unified, cross-modal motion vocabulary. Second, grounded in this motion language, a single, unified MLLM architecture is trained to handle all tasks. This module flexibly processes diverse, temporal inputs, unifying 3D skeleton pose estimation from video (perception) with skeleton-based motion prediction and in-betweening (generation). Extensive experiments on standard benchmarks, including Human3.6M, demonstrate that our unified method achieves state-of-the-art or competitive performance across all motion tasks. This showcases a more efficient and scalable path for generative motion analysis using skeletons.
Trustworthy Evaluation of Robotic Manipulation: A New Benchmark and AutoEval Methods
Jan 26, 2026Driven by the rapid evolution of Vision-Action and Vision-Language-Action models, imitation learning has significantly advanced robotic manipulation capabilities. However, evaluation methodologies have lagged behind, hindering the establishment of Trustworthy Evaluation for these behaviors. Current paradigms rely on binary success rates, failing to address the critical dimensions of trust: Source Authenticity (i.e., distinguishing genuine policy behaviors from human teleoperation) and Execution Quality (e.g., smoothness and safety). To bridge these gaps, we propose a solution that combines the Eval-Actions benchmark and the AutoEval architecture. First, we construct the Eval-Actions benchmark to support trustworthiness analysis. Distinct from existing datasets restricted to successful human demonstrations, Eval-Actions integrates VA and VLA policy execution trajectories alongside human teleoperation data, explicitly including failure scenarios. This dataset is structured around three core supervision signals: Expert Grading (EG), Rank-Guided preferences (RG), and Chain-of-Thought (CoT). Building on this, we propose the AutoEval architecture: AutoEval leverages Spatio-Temporal Aggregation for semantic assessment, augmented by an auxiliary Kinematic Calibration Signal to refine motion smoothness; AutoEval Plus (AutoEval-P) incorporates the Group Relative Policy Optimization (GRPO) paradigm to enhance logical reasoning capabilities. Experiments show AutoEval achieves Spearman's Rank Correlation Coefficients (SRCC) of 0.81 and 0.84 under the EG and RG protocols, respectively. Crucially, the framework possesses robust source discrimination capabilities, distinguishing between policy-generated and teleoperated videos with 99.6% accuracy, thereby establishing a rigorous standard for trustworthy robotic evaluation. Our project and code are available at https://term-bench.github.io/.
Render-of-Thought: Rendering Textual Chain-of-Thought as Images for Visual Latent Reasoning
Jan 21, 2026Chain-of-Thought (CoT) prompting has achieved remarkable success in unlocking the reasoning capabilities of Large Language Models (LLMs). Although CoT prompting enhances reasoning, its verbosity imposes substantial computational overhead. Recent works often focus exclusively on outcome alignment and lack supervision on the intermediate reasoning process. These deficiencies obscure the analyzability of the latent reasoning chain. To address these challenges, we introduce Render-of-Thought (RoT), the first framework to reify the reasoning chain by rendering textual steps into images, making the latent rationale explicit and traceable. Specifically, we leverage the vision encoders of existing Vision Language Models (VLMs) as semantic anchors to align the vision embeddings with the textual space. This design ensures plug-and-play implementation without incurring additional pre-training overhead. Extensive experiments on mathematical and logical reasoning benchmarks demonstrate that our method achieves 3-4x token compression and substantial inference acceleration compared to explicit CoT. Furthermore, it maintains competitive performance against other methods, validating the feasibility of this paradigm. Our code is available at https://github.com/TencentBAC/RoT
ReSeek: A Self-Correcting Framework for Search Agents with Instructive Rewards
Oct 01, 2025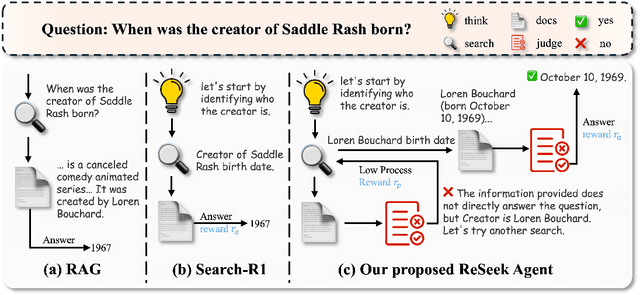
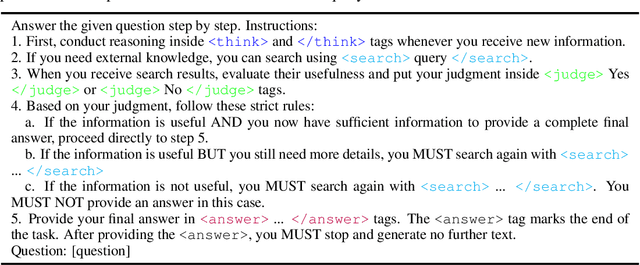
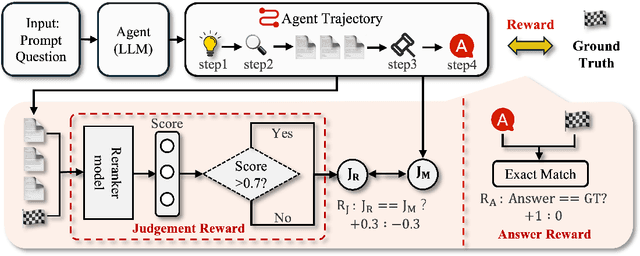
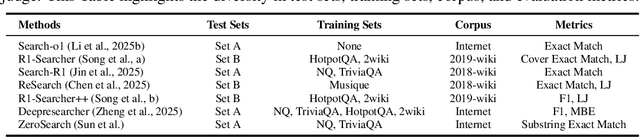
Search agents powered by Large Language Models (LLMs) have demonstrated significant potential in tackling knowledge-intensive tasks. Reinforcement learning (RL) has emerged as a powerful paradigm for training these agents to perform complex, multi-step reasoning. However, prior RL-based methods often rely on sparse or rule-based rewards, which can lead agents to commit to suboptimal or erroneous reasoning paths without the ability to recover. To address these limitations, we propose ReSeek, a novel self-correcting framework for training search agents. Our framework introduces a self-correction mechanism that empowers the agent to dynamically identify and recover from erroneous search paths during an episode. By invoking a special JUDGE action, the agent can judge the information and re-plan its search strategy. To guide this process, we design a dense, instructive process reward function, which decomposes into a correctness reward for retrieving factual information and a utility reward for finding information genuinely useful for the query. Furthermore, to mitigate the risk of data contamination in existing datasets, we introduce FictionalHot, a new and challenging benchmark with recently curated questions requiring complex reasoning. Being intuitively reasonable and practically simple, extensive experiments show that agents trained with ReSeek significantly outperform SOTA baselines in task success rate and path faithfulness.
UST-SSM: Unified Spatio-Temporal State Space Models for Point Cloud Video Modeling
Aug 20, 2025



Point cloud videos capture dynamic 3D motion while reducing the effects of lighting and viewpoint variations, making them highly effective for recognizing subtle and continuous human actions. Although Selective State Space Models (SSMs) have shown good performance in sequence modeling with linear complexity, the spatio-temporal disorder of point cloud videos hinders their unidirectional modeling when directly unfolding the point cloud video into a 1D sequence through temporally sequential scanning. To address this challenge, we propose the Unified Spatio-Temporal State Space Model (UST-SSM), which extends the latest advancements in SSMs to point cloud videos. Specifically, we introduce Spatial-Temporal Selection Scanning (STSS), which reorganizes unordered points into semantic-aware sequences through prompt-guided clustering, thereby enabling the effective utilization of points that are spatially and temporally distant yet similar within the sequence. For missing 4D geometric and motion details, Spatio-Temporal Structure Aggregation (STSA) aggregates spatio-temporal features and compensates. To improve temporal interaction within the sampled sequence, Temporal Interaction Sampling (TIS) enhances fine-grained temporal dependencies through non-anchor frame utilization and expanded receptive fields. Experimental results on the MSR-Action3D, NTU RGB+D, and Synthia 4D datasets validate the effectiveness of our method. Our code is available at https://github.com/wangzy01/UST-SSM.
Recognizing Actions from Robotic View for Natural Human-Robot Interaction
Jul 30, 2025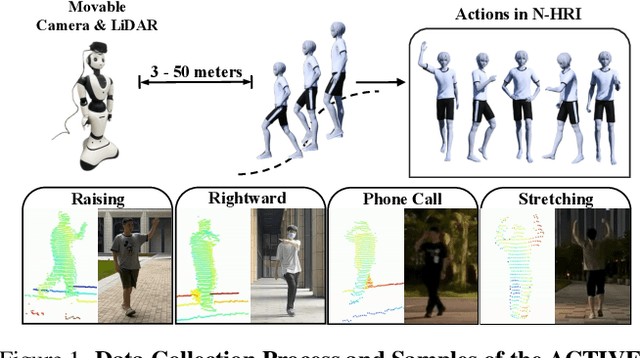
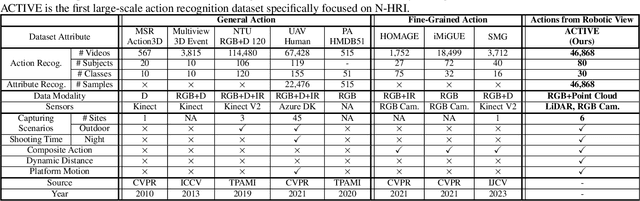
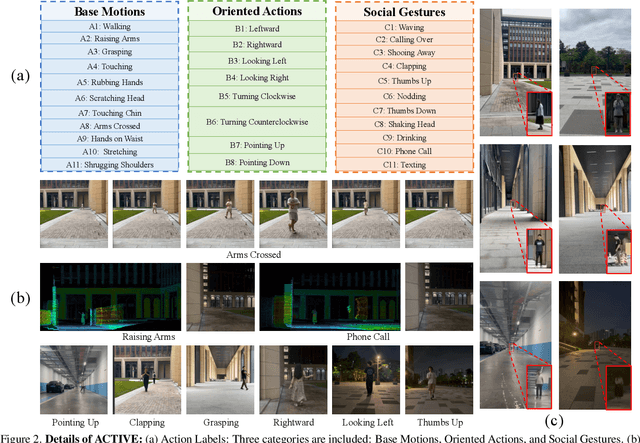
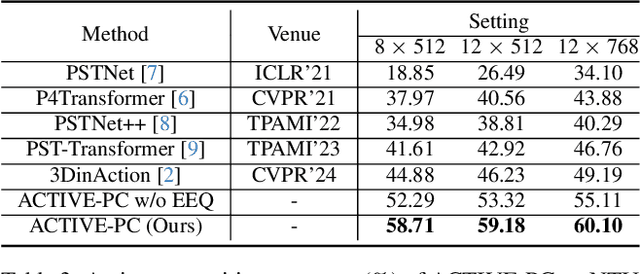
Natural Human-Robot Interaction (N-HRI) requires robots to recognize human actions at varying distances and states, regardless of whether the robot itself is in motion or stationary. This setup is more flexible and practical than conventional human action recognition tasks. However, existing benchmarks designed for traditional action recognition fail to address the unique complexities in N-HRI due to limited data, modalities, task categories, and diversity of subjects and environments. To address these challenges, we introduce ACTIVE (Action from Robotic View), a large-scale dataset tailored specifically for perception-centric robotic views prevalent in mobile service robots. ACTIVE comprises 30 composite action categories, 80 participants, and 46,868 annotated video instances, covering both RGB and point cloud modalities. Participants performed various human actions in diverse environments at distances ranging from 3m to 50m, while the camera platform was also mobile, simulating real-world scenarios of robot perception with varying camera heights due to uneven ground. This comprehensive and challenging benchmark aims to advance action and attribute recognition research in N-HRI. Furthermore, we propose ACTIVE-PC, a method that accurately perceives human actions at long distances using Multilevel Neighborhood Sampling, Layered Recognizers, Elastic Ellipse Query, and precise decoupling of kinematic interference from human actions. Experimental results demonstrate the effectiveness of ACTIVE-PC. Our code is available at: https://github.com/wangzy01/ACTIVE-Action-from-Robotic-View.
ClickDiff: Click to Induce Semantic Contact Map for Controllable Grasp Generation with Diffusion Models
Jul 28, 2024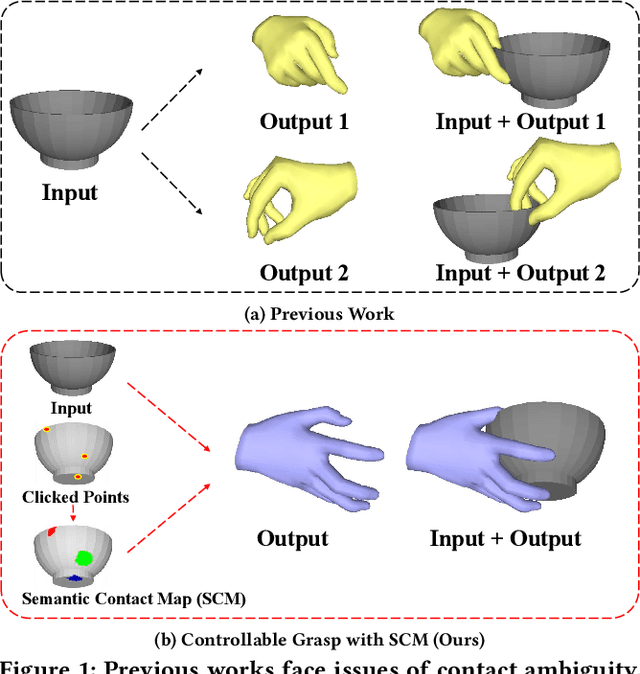
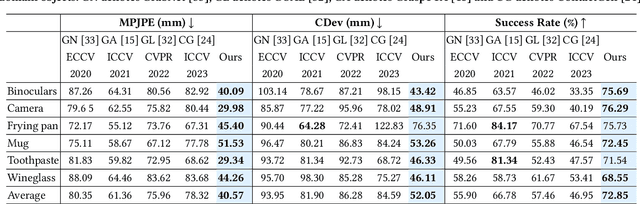


Grasp generation aims to create complex hand-object interactions with a specified object. While traditional approaches for hand generation have primarily focused on visibility and diversity under scene constraints, they tend to overlook the fine-grained hand-object interactions such as contacts, resulting in inaccurate and undesired grasps. To address these challenges, we propose a controllable grasp generation task and introduce ClickDiff, a controllable conditional generation model that leverages a fine-grained Semantic Contact Map (SCM). Particularly when synthesizing interactive grasps, the method enables the precise control of grasp synthesis through either user-specified or algorithmically predicted Semantic Contact Map. Specifically, to optimally utilize contact supervision constraints and to accurately model the complex physical structure of hands, we propose a Dual Generation Framework. Within this framework, the Semantic Conditional Module generates reasonable contact maps based on fine-grained contact information, while the Contact Conditional Module utilizes contact maps alongside object point clouds to generate realistic grasps. We evaluate the evaluation criteria applicable to controllable grasp generation. Both unimanual and bimanual generation experiments on GRAB and ARCTIC datasets verify the validity of our proposed method, demonstrating the efficacy and robustness of ClickDiff, even with previously unseen objects. Our code is available at https://github.com/adventurer-w/ClickDiff.
Channel Knowledge Map (CKM)-Assisted Multi-UAV Wireless Network: CKM Construction and UAV Placement
Jul 05, 2022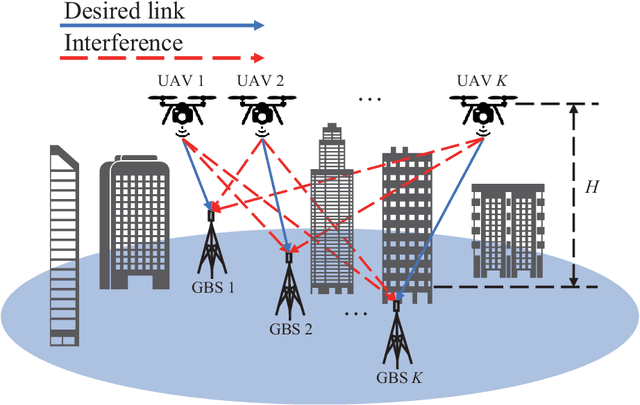
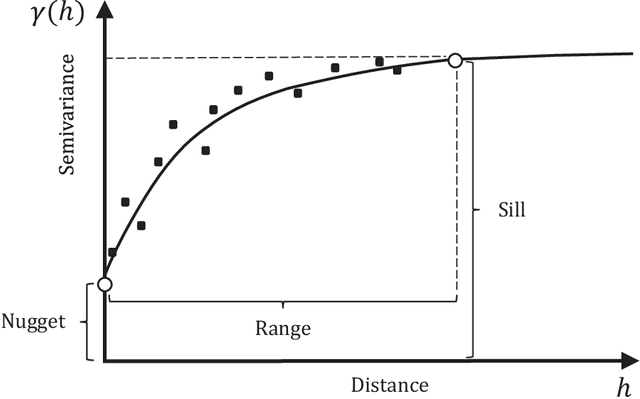
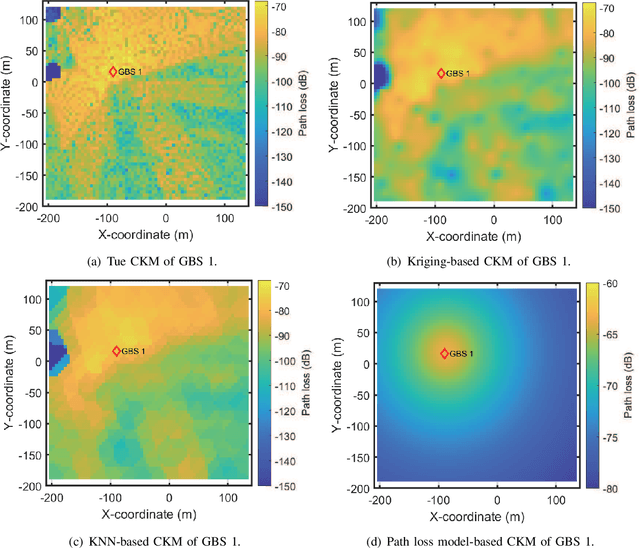
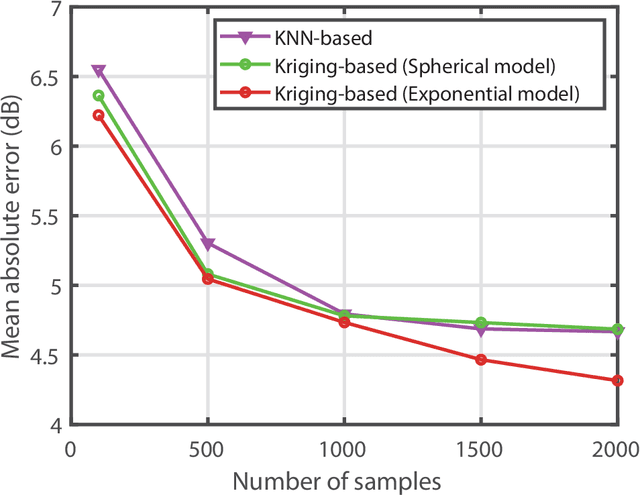
Channel knowledge map (CKM) has recently emerged to facilitate the placement and trajectory optimization for unmanned aerial vehicle (UAV) communications. This paper investigates a CKM-assisted multi-UAV wireless network, by focusing on the construction and utilization of CKMs for multi-UAV placement optimization. First, we consider the CKM construction problem when data measurements for only a limited number of points are available. Towards this end, we exploit a data-driven interpolation technique to construct CKMs to characterize the signal propagation environments. Next, we study the multi-UAV placement optimization problem by utilizing the constructed CKMs, in which the multiple UAVs aim to optimize their placement locations to maximize the weighted sum rate with their respectively associated ground base stations (GBSs). However, the rate function based on the CKMs is generally non-differentiable. To tackle this issue, we propose a novel iterative algorithm based on derivative-free optimization, in which a series of quadratic functions are iteratively constructed to approximate the objective function under a set of interpolation conditions, and accordingly, the UAVs' placement locations are updated by maximizing the approximate function subject to a trust region constraint. Finally, numerical results are presented to validate the proposed design achieves near-optimal performance, but with much lower implementation complexity.