 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReconDreamer-RL: Enhancing Reinforcement Learning via Diffusion-based Scene Reconstruction
Aug 11, 2025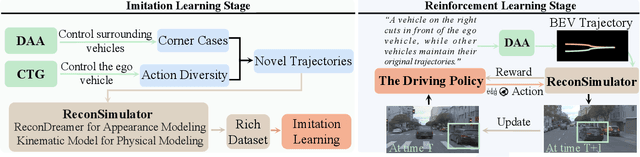

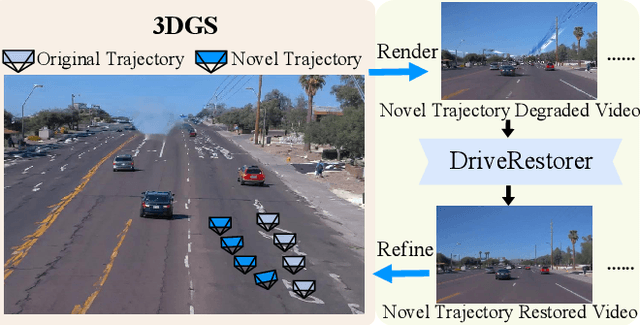

Reinforcement learning for training end-to-end autonomous driving models in closed-loop simulations is gaining growing attention. However, most simulation environments differ significantly from real-world conditions, creating a substantial simulation-to-reality (sim2real) gap. To bridge this gap, some approaches utilize scene reconstruction techniques to create photorealistic environments as a simulator. While this improves realistic sensor simulation, these methods are inherently constrained by the distribution of the training data, making it difficult to render high-quality sensor data for novel trajectories or corner case scenarios. Therefore, we propose ReconDreamer-RL, a framework designed to integrate video diffusion priors into scene reconstruction to aid reinforcement learning, thereby enhancing end-to-end autonomous driving training. Specifically, in ReconDreamer-RL, we introduce ReconSimulator, which combines the video diffusion prior for appearance modeling and incorporates a kinematic model for physical modeling, thereby reconstructing driving scenarios from real-world data. This narrows the sim2real gap for closed-loop evaluation and reinforcement learning. To cover more corner-case scenarios, we introduce the Dynamic Adversary Agent (DAA), which adjusts the trajectories of surrounding vehicles relative to the ego vehicle, autonomously generating corner-case traffic scenarios (e.g., cut-in). Finally, the Cousin Trajectory Generator (CTG) is proposed to address the issue of training data distribution, which is often biased toward simple straight-line movements. Experiments show that ReconDreamer-RL improves end-to-end autonomous driving training, outperforming imitation learning methods with a 5x reduction in the Collision Ratio.
WonderFree: Enhancing Novel View Quality and Cross-View Consistency for 3D Scene Exploration
Jun 25, 2025Interactive 3D scene generation from a single image has gained significant attention due to its potential to create immersive virtual worlds. However, a key challenge in current 3D generation methods is the limited explorability, which cannot render high-quality images during larger maneuvers beyond the original viewpoint, particularly when attempting to move forward into unseen areas. To address this challenge, we propose WonderFree, the first model that enables users to interactively generate 3D worlds with the freedom to explore from arbitrary angles and directions. Specifically, we decouple this challenge into two key subproblems: novel view quality, which addresses visual artifacts and floating issues in novel views, and cross-view consistency, which ensures spatial consistency across different viewpoints. To enhance rendering quality in novel views, we introduce WorldRestorer, a data-driven video restoration model designed to eliminate floaters and artifacts. In addition, a data collection pipeline is presented to automatically gather training data for WorldRestorer, ensuring it can handle scenes with varying styles needed for 3D scene generation. Furthermore, to improve cross-view consistency, we propose ConsistView, a multi-view joint restoration mechanism that simultaneously restores multiple perspectives while maintaining spatiotemporal coherence. Experimental results demonstrate that WonderFree not only enhances rendering quality across diverse viewpoints but also significantly improves global coherence and consistency. These improvements are confirmed by CLIP-based metrics and a user study showing a 77.20% preference for WonderFree over WonderWorld enabling a seamless and immersive 3D exploration experience. The code, model, and data will be publicly available.
WonderTurbo: Generating Interactive 3D World in 0.72 Seconds
Apr 03, 2025



Interactive 3D generation is gaining momentum and capturing extensive attention for its potential to create immersive virtual experiences. However, a critical challenge in current 3D generation technologies lies in achieving real-time interactivity. To address this issue, we introduce WonderTurbo, the first real-time interactive 3D scene generation framework capable of generating novel perspectives of 3D scenes within 0.72 seconds. Specifically, WonderTurbo accelerates both geometric and appearance modeling in 3D scene generation. In terms of geometry, we propose StepSplat, an innovative method that constructs efficient 3D geometric representations through dynamic updates, each taking only 0.26 seconds. Additionally, we design QuickDepth, a lightweight depth completion module that provides consistent depth input for StepSplat, further enhancing geometric accuracy. For appearance modeling, we develop FastPaint, a 2-steps diffusion model tailored for instant inpainting, which focuses on maintaining spatial appearance consistency. Experimental results demonstrate that WonderTurbo achieves a remarkable 15X speedup compared to baseline methods, while preserving excellent spatial consistency and delivering high-quality output.
ReconDreamer: Crafting World Models for Driving Scene Reconstruction via Online Restoration
Nov 29, 2024



Closed-loop simulation is crucial for end-to-end autonomous driving. Existing sensor simulation methods (e.g., NeRF and 3DGS) reconstruct driving scenes based on conditions that closely mirror training data distributions. However, these methods struggle with rendering novel trajectories, such as lane changes. Recent works have demonstrated that integrating world model knowledge alleviates these issues. Despite their efficiency, these approaches still encounter difficulties in the accurate representation of more complex maneuvers, with multi-lane shifts being a notable example. Therefore, we introduce ReconDreamer, which enhances driving scene reconstruction through incremental integration of world model knowledge. Specifically, DriveRestorer is proposed to mitigate artifacts via online restoration. This is complemented by a progressive data update strategy designed to ensure high-quality rendering for more complex maneuvers. To the best of our knowledge, ReconDreamer is the first method to effectively render in large maneuvers. Experimental results demonstrate that ReconDreamer outperforms Street Gaussians in the NTA-IoU, NTL-IoU, and FID, with relative improvements by 24.87%, 6.72%, and 29.97%. Furthermore, ReconDreamer surpasses DriveDreamer4D with PVG during large maneuver rendering, as verified by a relative improvement of 195.87% in the NTA-IoU metric and a comprehensive user study.
DriveDreamer4D: World Models Are Effective Data Machines for 4D Driving Scene Representation
Oct 17, 2024



Closed-loop simulation is essential for advancing end-to-end autonomous driving systems. Contemporary sensor simulation methods, such as NeRF and 3DGS, rely predominantly on conditions closely aligned with training data distributions, which are largely confined to forward-driving scenarios. Consequently, these methods face limitations when rendering complex maneuvers (e.g., lane change, acceleration, deceleration). Recent advancements in autonomous-driving world models have demonstrated the potential to generate diverse driving videos. However, these approaches remain constrained to 2D video generation, inherently lacking the spatiotemporal coherence required to capture intricacies of dynamic driving environments. In this paper, we introduce \textit{DriveDreamer4D}, which enhances 4D driving scene representation leveraging world model priors. Specifically, we utilize the world model as a data machine to synthesize novel trajectory videos based on real-world driving data. Notably, we explicitly leverage structured conditions to control the spatial-temporal consistency of foreground and background elements, thus the generated data adheres closely to traffic constraints. To our knowledge, \textit{DriveDreamer4D} is the first to utilize video generation models for improving 4D reconstruction in driving scenarios. Experimental results reveal that \textit{DriveDreamer4D} significantly enhances generation quality under novel trajectory views, achieving a relative improvement in FID by 24.5\%, 39.0\%, and 10.5\% compared to PVG, $\text{S}^3$Gaussian, and Deformable-GS. Moreover, \textit{DriveDreamer4D} markedly enhances the spatiotemporal coherence of driving agents, which is verified by a comprehensive user study and the relative increases of 20.3\%, 42.0\%, and 13.7\% in the NTA-IoU metric.