 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDEXOP: A Device for Robotic Transfer of Dexterous Human Manipulation
Sep 04, 2025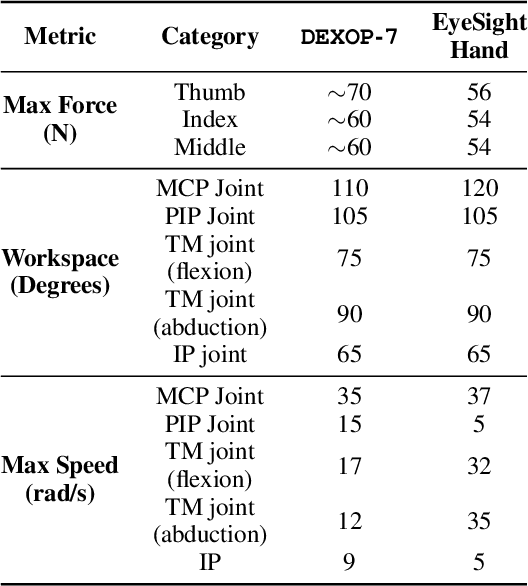
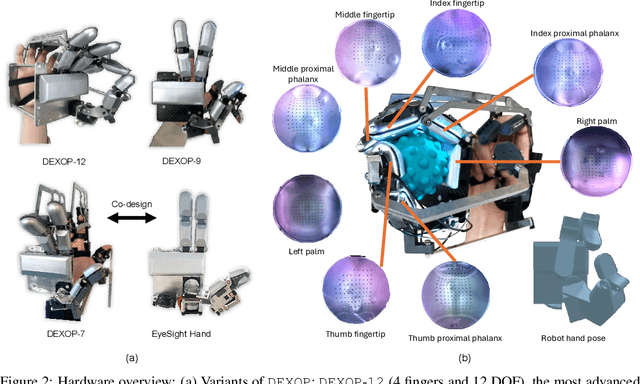
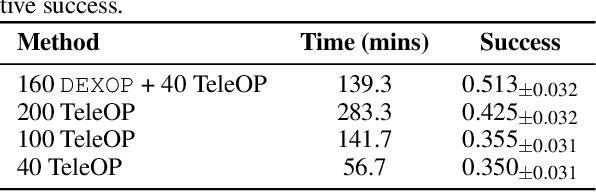
We introduce perioperation, a paradigm for robotic data collection that sensorizes and records human manipulation while maximizing the transferability of the data to real robots. We implement this paradigm in DEXOP, a passive hand exoskeleton designed to maximize human ability to collect rich sensory (vision + tactile) data for diverse dexterous manipulation tasks in natural environments. DEXOP mechanically connects human fingers to robot fingers, providing users with direct contact feedback (via proprioception) and mirrors the human hand pose to the passive robot hand to maximize the transfer of demonstrated skills to the robot. The force feedback and pose mirroring make task demonstrations more natural for humans compared to teleoperation, increasing both speed and accuracy. We evaluate DEXOP across a range of dexterous, contact-rich tasks, demonstrating its ability to collect high-quality demonstration data at scale. Policies learned with DEXOP data significantly improve task performance per unit time of data collection compared to teleoperation, making DEXOP a powerful tool for advancing robot dexterity. Our project page is at https://dex-op.github.io.
Reactive In-Air Clothing Manipulation with Confidence-Aware Dense Correspondence and Visuotactile Affordance
Sep 04, 2025Manipulating clothing is challenging due to complex configurations, variable material dynamics, and frequent self-occlusion. Prior systems often flatten garments or assume visibility of key features. We present a dual-arm visuotactile framework that combines confidence-aware dense visual correspondence and tactile-supervised grasp affordance to operate directly on crumpled and suspended garments. The correspondence model is trained on a custom, high-fidelity simulated dataset using a distributional loss that captures cloth symmetries and generates correspondence confidence estimates. These estimates guide a reactive state machine that adapts folding strategies based on perceptual uncertainty. In parallel, a visuotactile grasp affordance network, self-supervised using high-resolution tactile feedback, determines which regions are physically graspable. The same tactile classifier is used during execution for real-time grasp validation. By deferring action in low-confidence states, the system handles highly occluded table-top and in-air configurations. We demonstrate our task-agnostic grasp selection module in folding and hanging tasks. Moreover, our dense descriptors provide a reusable intermediate representation for other planning modalities, such as extracting grasp targets from human video demonstrations, paving the way for more generalizable and scalable garment manipulation.
PolyTouch: A Robust Multi-Modal Tactile Sensor for Contact-rich Manipulation Using Tactile-Diffusion Policies
Apr 27, 2025Achieving robust dexterous manipulation in unstructured domestic environments remains a significant challenge in robotics. Even with state-of-the-art robot learning methods, haptic-oblivious control strategies (i.e. those relying only on external vision and/or proprioception) often fall short due to occlusions, visual complexities, and the need for precise contact interaction control. To address these limitations, we introduce PolyTouch, a novel robot finger that integrates camera-based tactile sensing, acoustic sensing, and peripheral visual sensing into a single design that is compact and durable. PolyTouch provides high-resolution tactile feedback across multiple temporal scales, which is essential for efficiently learning complex manipulation tasks. Experiments demonstrate an at least 20-fold increase in lifespan over commercial tactile sensors, with a design that is both easy to manufacture and scalable. We then use this multi-modal tactile feedback along with visuo-proprioceptive observations to synthesize a tactile-diffusion policy from human demonstrations; the resulting contact-aware control policy significantly outperforms haptic-oblivious policies in multiple contact-aware manipulation policies. This paper highlights how effectively integrating multi-modal contact sensing can hasten the development of effective contact-aware manipulation policies, paving the way for more reliable and versatile domestic robots. More information can be found at https://polytouch.alanz.info/
EyeSight Hand: Design of a Fully-Actuated Dexterous Robot Hand with Integrated Vision-Based Tactile Sensors and Compliant Actuation
Aug 12, 2024



In this work, we introduce the EyeSight Hand, a novel 7 degrees of freedom (DoF) humanoid hand featuring integrated vision-based tactile sensors tailored for enhanced whole-hand manipulation. Additionally, we introduce an actuation scheme centered around quasi-direct drive actuation to achieve human-like strength and speed while ensuring robustness for large-scale data collection. We evaluate the EyeSight Hand on three challenging tasks: bottle opening, plasticine cutting, and plate pick and place, which require a blend of complex manipulation, tool use, and precise force application. Imitation learning models trained on these tasks, with a novel vision dropout strategy, showcase the benefits of tactile feedback in enhancing task success rates. Our results reveal that the integration of tactile sensing dramatically improves task performance, underscoring the critical role of tactile information in dexterous manipulation.
GelLink: A Compact Multi-phalanx Finger with Vision-based Tactile Sensing and Proprioception
Mar 25, 2024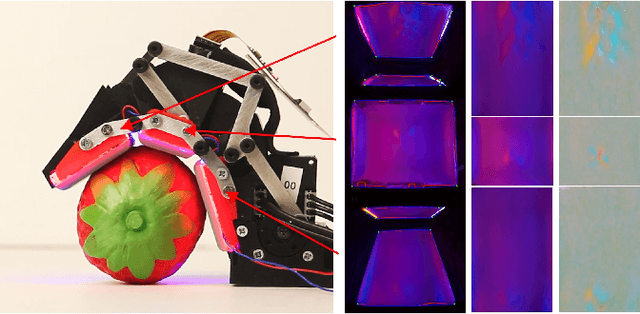
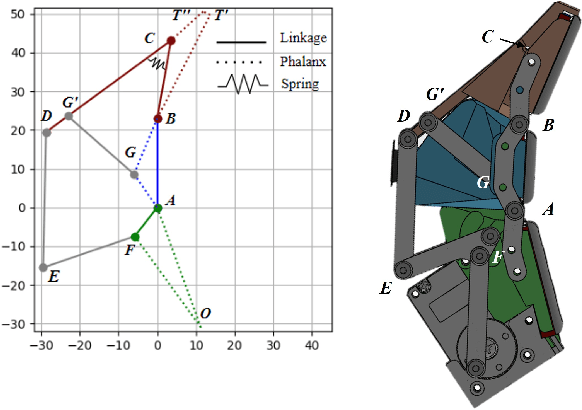
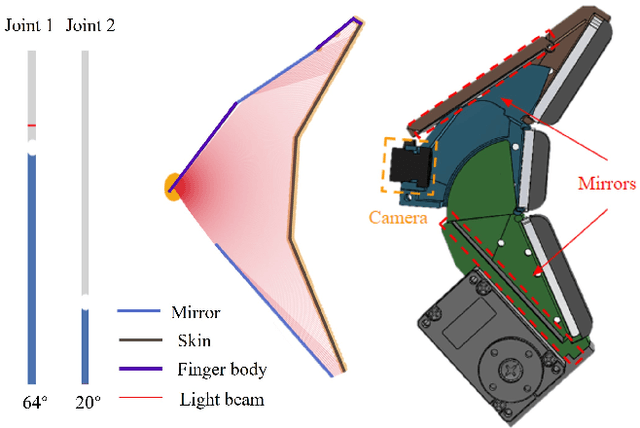
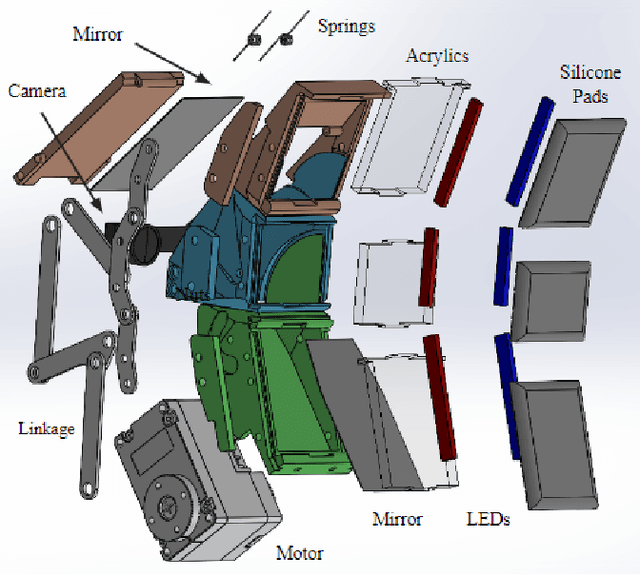
Compared to fully-actuated robotic end-effectors, underactuated ones are generally more adaptive, robust, and cost-effective. However, state estimation for underactuated hands is usually more challenging. Vision-based tactile sensors, like Gelsight, can mitigate this issue by providing high-resolution tactile sensing and accurate proprioceptive sensing. As such, we present GelLink, a compact, underactuated, linkage-driven robotic finger with low-cost, high-resolution vision-based tactile sensing and proprioceptive sensing capabilities. In order to reduce the amount of embedded hardware, i.e. the cameras and motors, we optimize the linkage transmission with a planar linkage mechanism simulator and develop a planar reflection simulator to simplify the tactile sensing hardware. As a result, GelLink only requires one motor to actuate the three phalanges, and one camera to capture tactile signals along the entire finger. Overall, GelLink is a compact robotic finger that shows adaptability and robustness when performing grasping tasks. The integration of vision-based tactile sensors can significantly enhance the capabilities of underactuated fingers and potentially broaden their future usage.
Tactile-Reactive Roller Grasper
Jun 16, 2023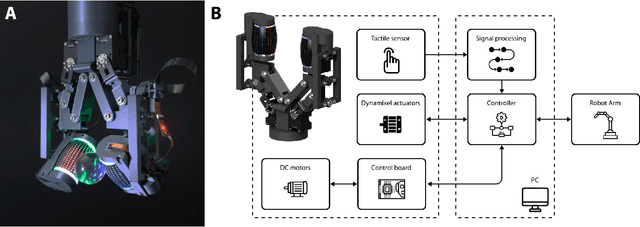
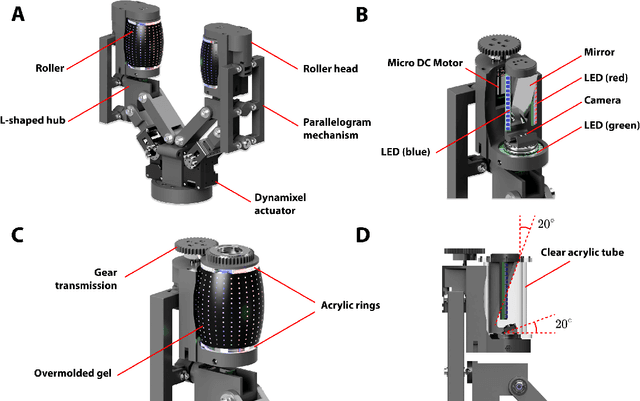
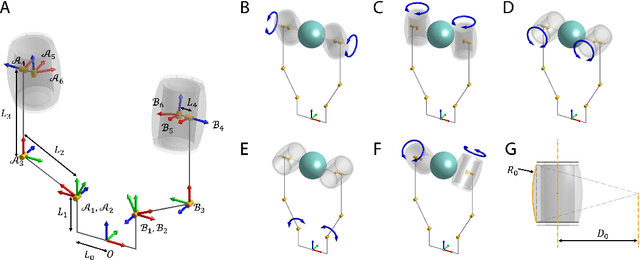
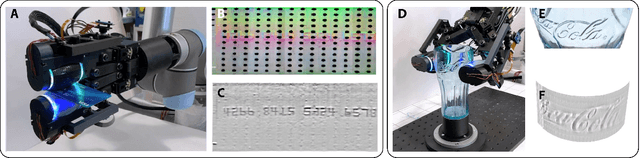
Manipulation of objects within a robot's hand is one of the most important challenges in achieving robot dexterity. The "Roller Graspers" refers to a family of non-anthropomorphic hands utilizing motorized, rolling fingertips to achieve in-hand manipulation. These graspers manipulate grasped objects by commanding the rollers to exert forces that propel the object in the desired motion directions. In this paper, we explore the possibility of robot in-hand manipulation through tactile-guided rolling. We do so by developing the Tactile-Reactive Roller Grasper (TRRG), which incorporates camera-based tactile sensing with compliant, steerable cylindrical fingertips, with accompanying sensor information processing and control strategies. We demonstrated that the combination of tactile feedback and the actively rolling surfaces enables a variety of robust in-hand manipulation applications. In addition, we also demonstrated object reconstruction techniques using tactile-guided rolling. A controlled experiment was conducted to provide insights on the benefits of tactile-reactive rollers for manipulation. We considered two manipulation cases: when the fingers are manipulating purely through rolling and when they are periodically breaking and reestablishing contact as in regrasping. We found that tactile-guided rolling can improve the manipulation robustness by allowing the grasper to perform necessary fine grip adjustments in both manipulation cases, indicating that hybrid rolling fingertip and finger-gaiting designs may be a promising research direction.
TactoFind: A Tactile Only System for Object Retrieval
Mar 23, 2023



We study the problem of object retrieval in scenarios where visual sensing is absent, object shapes are unknown beforehand and objects can move freely, like grabbing objects out of a drawer. Successful solutions require localizing free objects, identifying specific object instances, and then grasping the identified objects, only using touch feedback. Unlike vision, where cameras can observe the entire scene, touch sensors are local and only observe parts of the scene that are in contact with the manipulator. Moreover, information gathering via touch sensors necessitates applying forces on the touched surface which may disturb the scene itself. Reasoning with touch, therefore, requires careful exploration and integration of information over time -- a challenge we tackle. We present a system capable of using sparse tactile feedback from fingertip touch sensors on a dexterous hand to localize, identify and grasp novel objects without any visual feedback. Videos are available at https://taochenshh.github.io/projects/tactofind.
Visuotactile Affordances for Cloth Manipulation with Local Control
Dec 09, 2022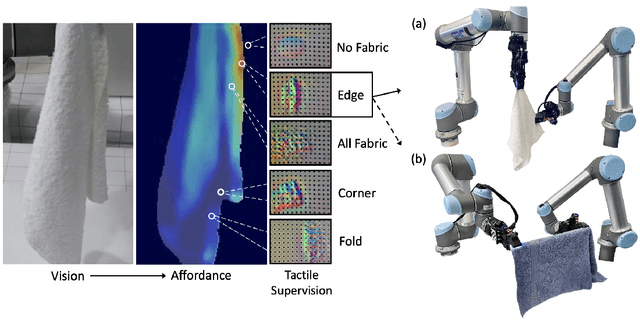
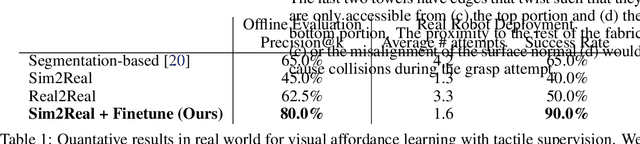
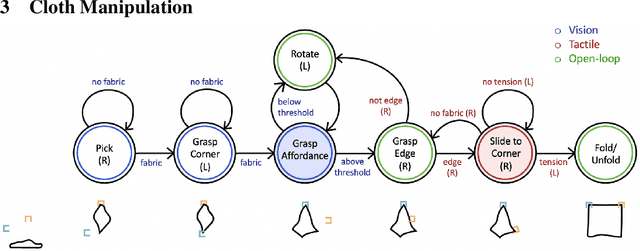
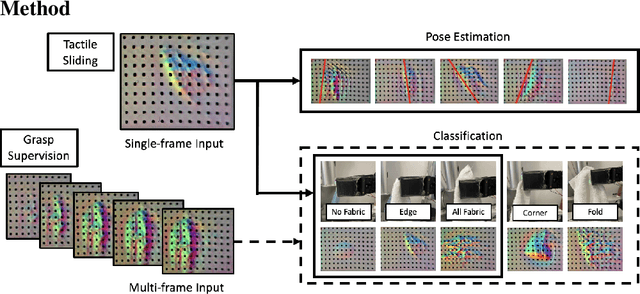
Cloth in the real world is often crumpled, self-occluded, or folded in on itself such that key regions, such as corners, are not directly graspable, making manipulation difficult. We propose a system that leverages visual and tactile perception to unfold the cloth via grasping and sliding on edges. By doing so, the robot is able to grasp two adjacent corners, enabling subsequent manipulation tasks like folding or hanging. As components of this system, we develop tactile perception networks that classify whether an edge is grasped and estimate the pose of the edge. We use the edge classification network to supervise a visuotactile edge grasp affordance network that can grasp edges with a 90% success rate. Once an edge is grasped, we demonstrate that the robot can slide along the cloth to the adjacent corner using tactile pose estimation/control in real time. See http://nehasunil.com/visuotactile/visuotactile.html for videos.
See, Hear, and Feel: Smart Sensory Fusion for Robotic Manipulation
Dec 08, 2022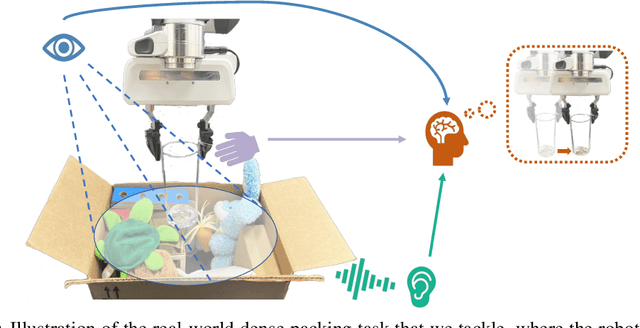
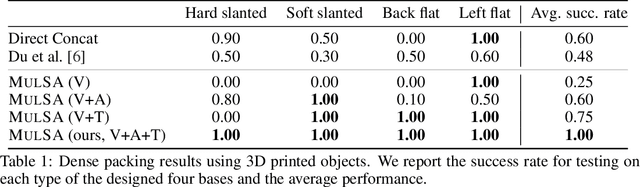
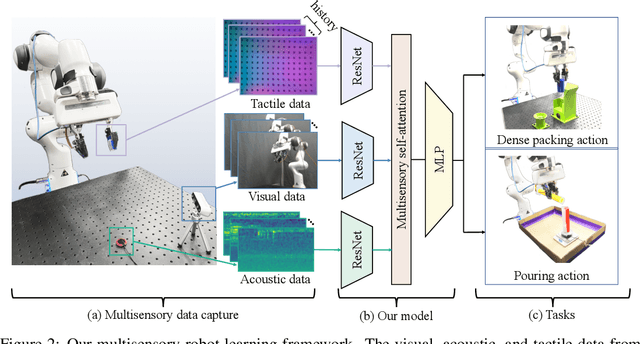
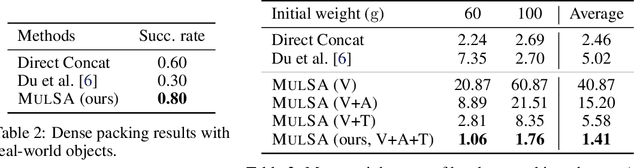
Humans use all of their senses to accomplish different tasks in everyday activities. In contrast, existing work on robotic manipulation mostly relies on one, or occasionally two modalities, such as vision and touch. In this work, we systematically study how visual, auditory, and tactile perception can jointly help robots to solve complex manipulation tasks. We build a robot system that can see with a camera, hear with a contact microphone, and feel with a vision-based tactile sensor, with all three sensory modalities fused with a self-attention model. Results on two challenging tasks, dense packing and pouring, demonstrate the necessity and power of multisensory perception for robotic manipulation: vision displays the global status of the robot but can often suffer from occlusion, audio provides immediate feedback of key moments that are even invisible, and touch offers precise local geometry for decision making. Leveraging all three modalities, our robotic system significantly outperforms prior methods.
Visual Dexterity: In-hand Dexterous Manipulation from Depth
Nov 21, 2022In-hand object reorientation is necessary for performing many dexterous manipulation tasks, such as tool use in unstructured environments that remain beyond the reach of current robots. Prior works built reorientation systems that assume one or many of the following specific circumstances: reorienting only specific objects with simple shapes, limited range of reorientation, slow or quasistatic manipulation, the need for specialized and costly sensor suites, simulation-only results, and other constraints which make the system infeasible for real-world deployment. We overcome these limitations and present a general object reorientation controller that is trained using reinforcement learning in simulation and evaluated in the real world. Our system uses readings from a single commodity depth camera to dynamically reorient complex objects by any amount in real time. The controller generalizes to novel objects not used during training. It is successful in the most challenging test: the ability to reorient objects in the air held by a downward-facing hand that must counteract gravity during reorientation. The results demonstrate that the policy transfer from simulation to the real world can be accomplished even for dynamic and contact-rich tasks. Lastly, our hardware only uses open-source components that cost less than five thousand dollars. Such construction makes it possible to replicate the work and democratize future research in dexterous manipulation. Videos are available at: https://taochenshh.github.io/projects/visual-dexterity.