 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisuotactile Affordances for Cloth Manipulation with Local Control
Paper and Code
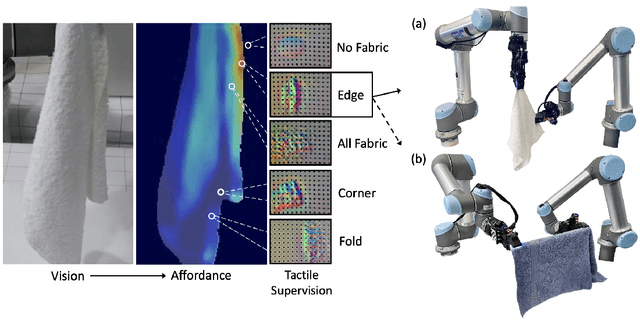
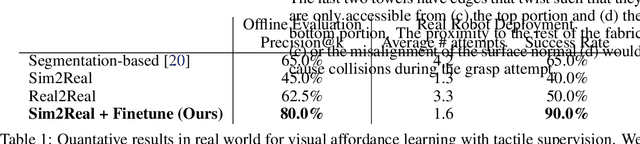
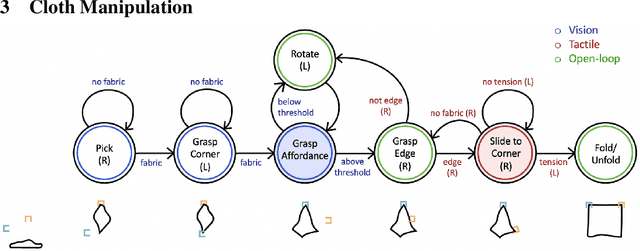
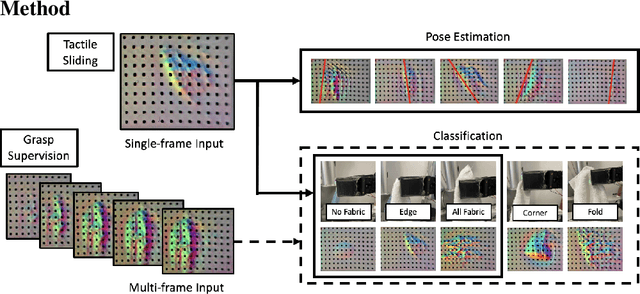
Cloth in the real world is often crumpled, self-occluded, or folded in on itself such that key regions, such as corners, are not directly graspable, making manipulation difficult. We propose a system that leverages visual and tactile perception to unfold the cloth via grasping and sliding on edges. By doing so, the robot is able to grasp two adjacent corners, enabling subsequent manipulation tasks like folding or hanging. As components of this system, we develop tactile perception networks that classify whether an edge is grasped and estimate the pose of the edge. We use the edge classification network to supervise a visuotactile edge grasp affordance network that can grasp edges with a 90% success rate. Once an edge is grasped, we demonstrate that the robot can slide along the cloth to the adjacent corner using tactile pose estimation/control in real time. See http://nehasunil.com/visuotactile/visuotactile.html for videos.