 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReactive In-Air Clothing Manipulation with Confidence-Aware Dense Correspondence and Visuotactile Affordance
Sep 04, 2025Manipulating clothing is challenging due to complex configurations, variable material dynamics, and frequent self-occlusion. Prior systems often flatten garments or assume visibility of key features. We present a dual-arm visuotactile framework that combines confidence-aware dense visual correspondence and tactile-supervised grasp affordance to operate directly on crumpled and suspended garments. The correspondence model is trained on a custom, high-fidelity simulated dataset using a distributional loss that captures cloth symmetries and generates correspondence confidence estimates. These estimates guide a reactive state machine that adapts folding strategies based on perceptual uncertainty. In parallel, a visuotactile grasp affordance network, self-supervised using high-resolution tactile feedback, determines which regions are physically graspable. The same tactile classifier is used during execution for real-time grasp validation. By deferring action in low-confidence states, the system handles highly occluded table-top and in-air configurations. We demonstrate our task-agnostic grasp selection module in folding and hanging tasks. Moreover, our dense descriptors provide a reusable intermediate representation for other planning modalities, such as extracting grasp targets from human video demonstrations, paving the way for more generalizable and scalable garment manipulation.
Visuotactile Affordances for Cloth Manipulation with Local Control
Dec 09, 2022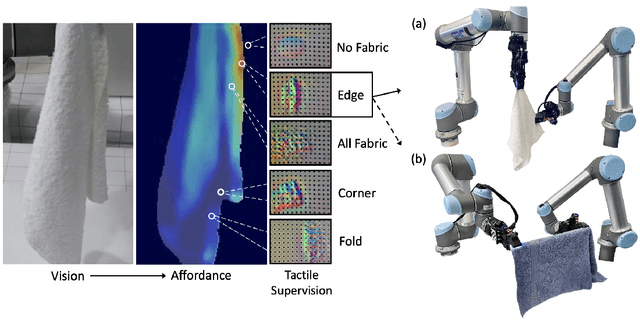
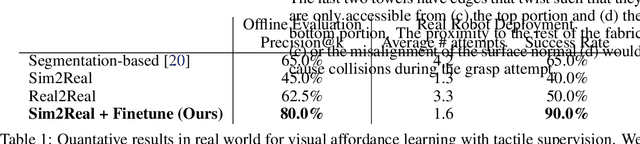
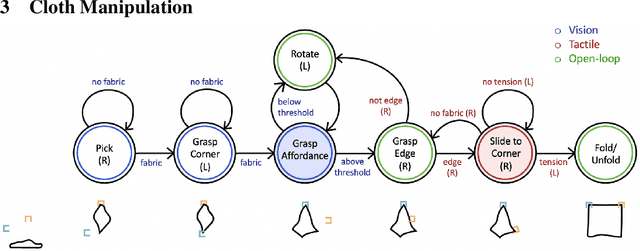
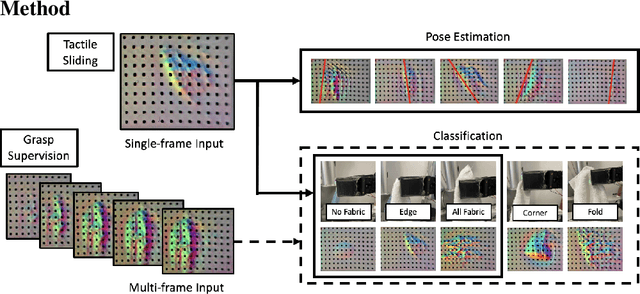
Cloth in the real world is often crumpled, self-occluded, or folded in on itself such that key regions, such as corners, are not directly graspable, making manipulation difficult. We propose a system that leverages visual and tactile perception to unfold the cloth via grasping and sliding on edges. By doing so, the robot is able to grasp two adjacent corners, enabling subsequent manipulation tasks like folding or hanging. As components of this system, we develop tactile perception networks that classify whether an edge is grasped and estimate the pose of the edge. We use the edge classification network to supervise a visuotactile edge grasp affordance network that can grasp edges with a 90% success rate. Once an edge is grasped, we demonstrate that the robot can slide along the cloth to the adjacent corner using tactile pose estimation/control in real time. See http://nehasunil.com/visuotactile/visuotactile.html for videos.
Cable Manipulation with a Tactile-Reactive Gripper
Oct 25, 2019
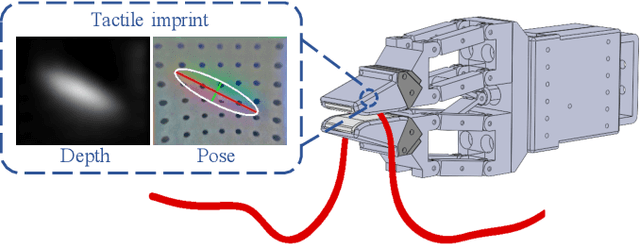
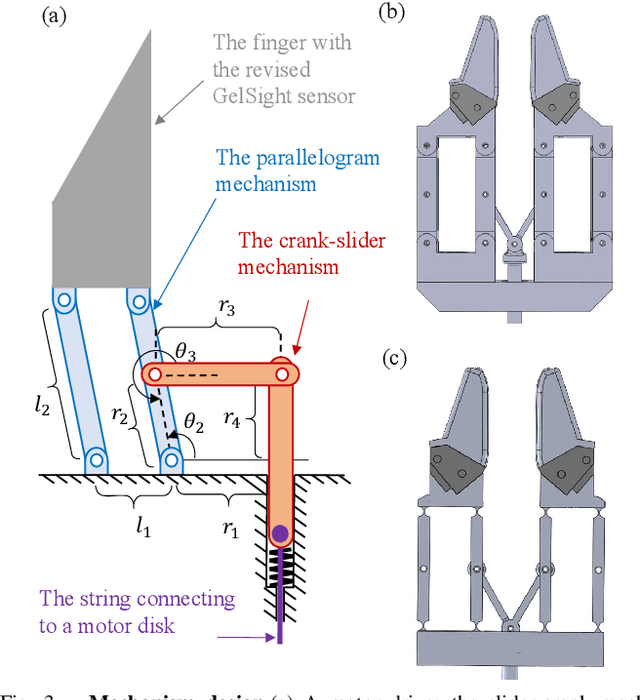

Manipulation of flexible cables is relevant to both industrial and household environments. In this paper, we develop a perception and control framework to enable robots to accomplish the task of following a cable. We rely on a vision-based tactile sensor, GelSight, to estimate the pose of the cable in the grip as well as the friction forces during cable sliding. We decompose the behavior of cable following into two tactile-based controllers: 1) Cable grip controller, where a PD controller combined with a leaky integrator are responsible for regulating the gripping force to maintain the frictional sliding forces close to a suitable value; and 2) Cable pose controller, where an LQR controller based on a learned linear model of the cable sliding dynamics is in charge of keeping the cable centered and aligned on the fingertips to prevent the cable from falling. This behavior is enabled by a designed reactive gripper with force and position control capabilities fitted with GelSight-based high resolution tactile sensors. With the proposed framework, we show that the robot can follow one meter of cable in a random configuration from beginning to end within 2-3 hand regrasps. We further demonstrate that the closed-loop system adapts to cables with different materials and thicknesses, moving at different target velocities.