 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDEXOP: A Device for Robotic Transfer of Dexterous Human Manipulation
Sep 04, 2025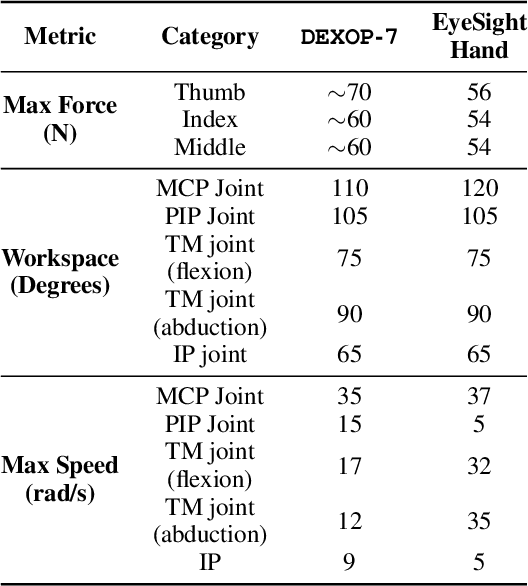
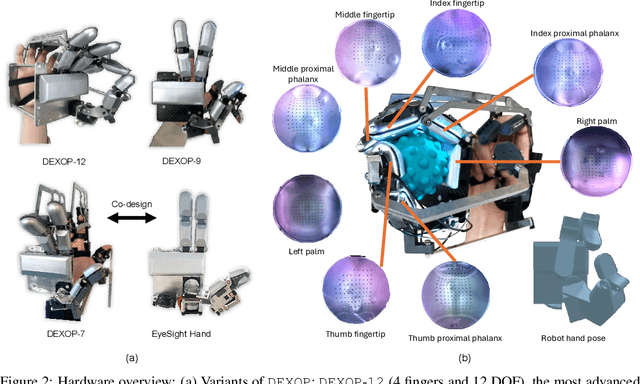
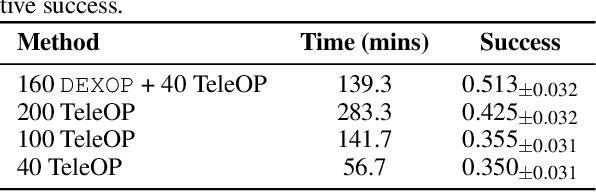
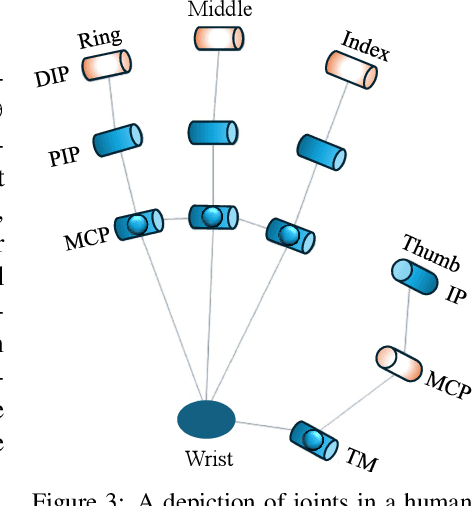
We introduce perioperation, a paradigm for robotic data collection that sensorizes and records human manipulation while maximizing the transferability of the data to real robots. We implement this paradigm in DEXOP, a passive hand exoskeleton designed to maximize human ability to collect rich sensory (vision + tactile) data for diverse dexterous manipulation tasks in natural environments. DEXOP mechanically connects human fingers to robot fingers, providing users with direct contact feedback (via proprioception) and mirrors the human hand pose to the passive robot hand to maximize the transfer of demonstrated skills to the robot. The force feedback and pose mirroring make task demonstrations more natural for humans compared to teleoperation, increasing both speed and accuracy. We evaluate DEXOP across a range of dexterous, contact-rich tasks, demonstrating its ability to collect high-quality demonstration data at scale. Policies learned with DEXOP data significantly improve task performance per unit time of data collection compared to teleoperation, making DEXOP a powerful tool for advancing robot dexterity. Our project page is at https://dex-op.github.io.
Geometry of contact: contact planning for multi-legged robots via spin models duality
Feb 07, 2023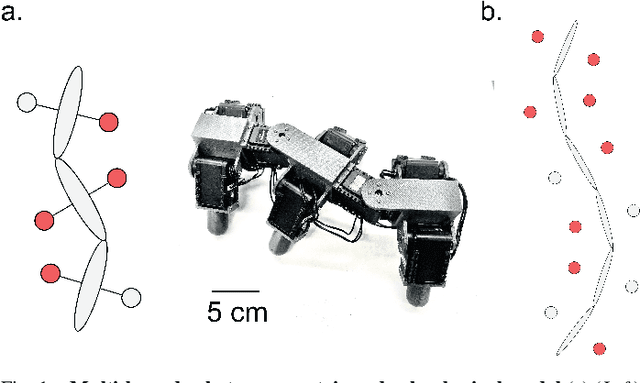
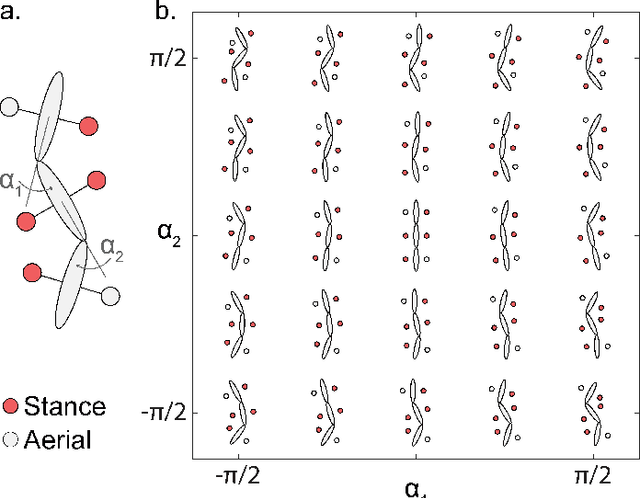
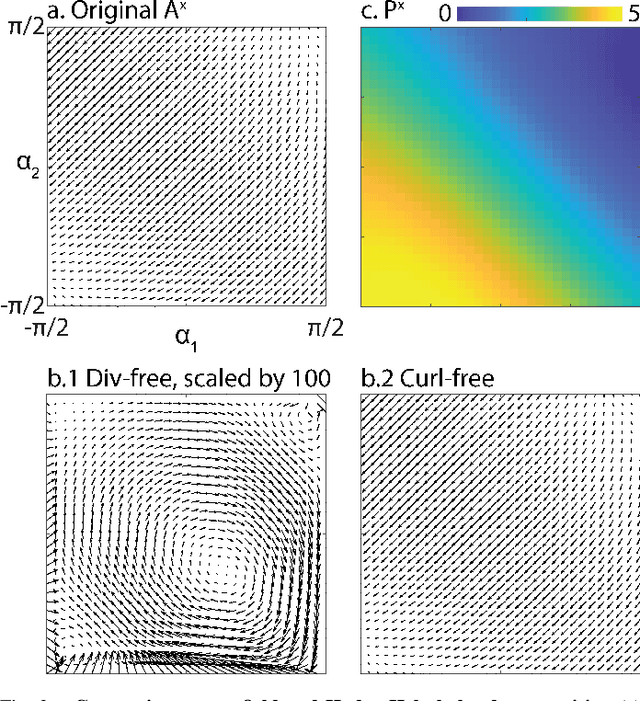
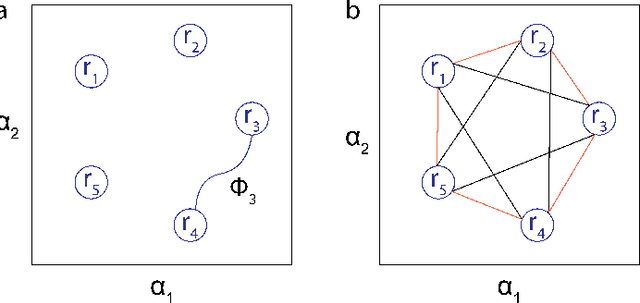
Contact planning is crucial in locomoting systems.Specifically, appropriate contact planning can enable versatile behaviors (e.g., sidewinding in limbless locomotors) and facilitate speed-dependent gait transitions (e.g., walk-trot-gallop in quadrupedal locomotors). The challenges of contact planning include determining not only the sequence by which contact is made and broken between the locomotor and the environments, but also the sequence of internal shape changes (e.g., body bending and limb shoulder joint oscillation). Most state-of-art contact planning algorithms focused on conventional robots (e.g.biped and quadruped) and conventional tasks (e.g. forward locomotion), and there is a lack of study on general contact planning in multi-legged robots. In this paper, we show that using geometric mechanics framework, we can obtain the global optimal contact sequence given the internal shape changes sequence. Therefore, we simplify the contact planning problem to a graph optimization problem to identify the internal shape changes. Taking advantages of the spatio-temporal symmetry in locomotion, we map the graph optimization problem to special cases of spin models, which allows us to obtain the global optima in polynomial time. We apply our approach to develop new forward and sidewinding behaviors in a hexapod and a 12-legged centipede. We verify our predictions using numerical and robophysical models, and obtain novel and effective locomotion behaviors.
Informative Neural Ensemble Kalman Learning
Aug 22, 2020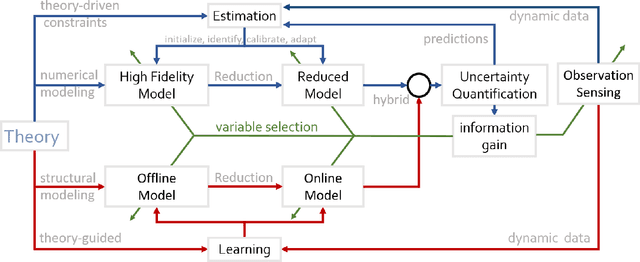
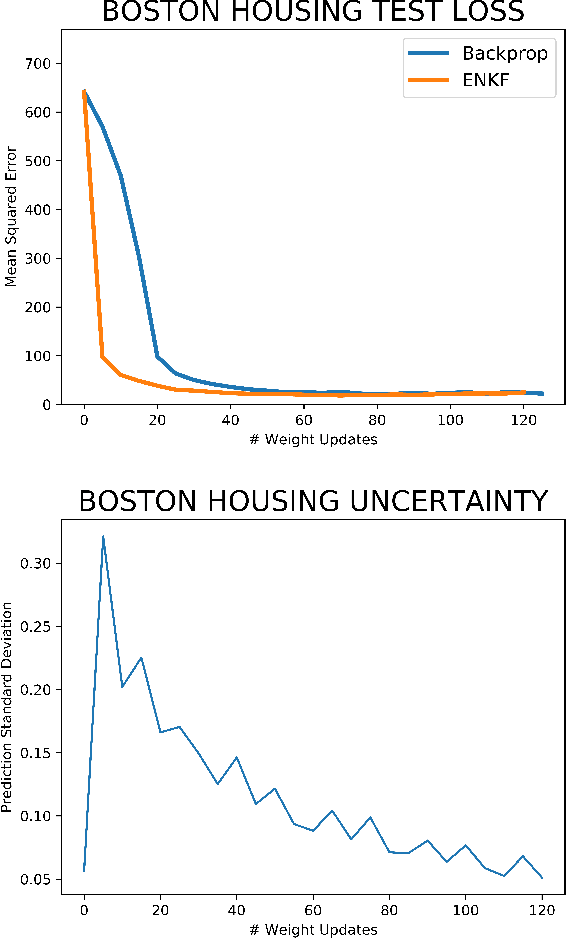
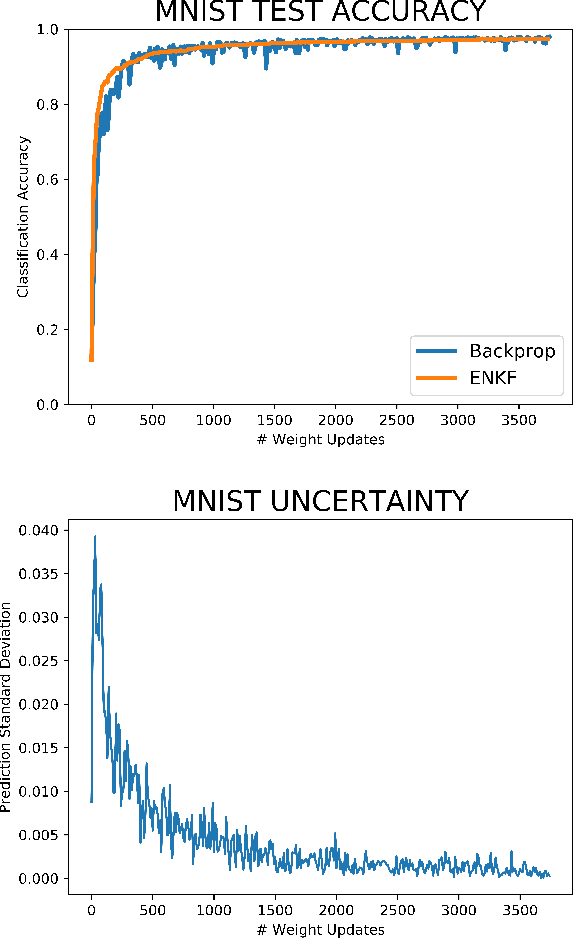
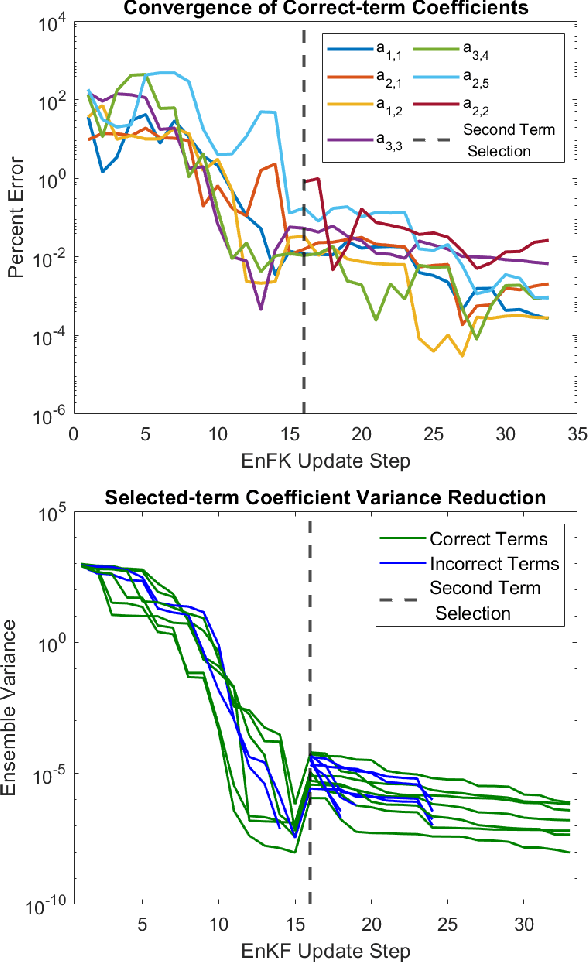
In stochastic systems, informative approaches select key measurement or decision variables that maximize information gain to enhance the efficacy of model-related inferences. Neural Learning also embodies stochastic dynamics, but informative Learning is less developed. Here, we propose Informative Ensemble Kalman Learning, which replaces backpropagation with an adaptive Ensemble Kalman Filter to quantify uncertainty and enables maximizing information gain during Learning. After demonstrating Ensemble Kalman Learning's competitive performance on standard datasets, we apply the informative approach to neural structure learning. In particular, we show that when trained from the Lorenz-63 system's simulations, the efficaciously learned structure recovers the dynamical equations. To the best of our knowledge, Informative Ensemble Kalman Learning is new. Results suggest that this approach to optimized Learning is promising.