 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Robust Antenna Provides Tactile Feedback in a Multi-legged Robot
Mar 08, 2026Multi-legged elongate robots hold promise for maneuvering through complex environments. Prior work has demonstrated that reliable locomotion can be achieved using open-loop body undulation and foot placement on rugose terrain. However, robust navigation through confined spaces remains challenging when body-environment contact is extensive and terrain rheology varies rapidly. To address this challenge, we develop a pair of tactile antennae for multi-legged robots that enable real-time sensing of surrounding geometry, modeling the morphology and function of biological centipede antennae. Each antenna features gradient compliance, with a stiff base and soft tip, allowing repeated deformation and elastic recovery. Robophysical experiments reveal a relationship between continuous antenna curvature and contact force, leading to a simplified mapping from antenna deformation to inferred discrete collision states. We incorporate this mapping into a controller that selects among a set of locomotor maneuvers based on the inferred collision state. Experiments in obstacle-rich and confined environments demonstrate that tactile feedback enables reliable steering and allows the robot to recover from near-stuck conditions without requiring global environmental information or real-time vision. These results highlight how mechanically tuned tactile appendages can simplify sensing and enhance autonomy in elongate multi-legged robots operating in constrained spaces.
Agile asymmetric multi-legged locomotion: contact planning via geometric mechanics and spin model duality
Feb 09, 2026Legged robot research is presently focused on bipedal or quadrupedal robots, despite capabilities to build robots with many more legs to potentially improve locomotion performance. This imbalance is not necessarily due to hardware limitations, but rather to the absence of principled control frameworks that explain when and how additional legs improve locomotion performance. In multi-legged systems, coordinating many simultaneous contacts introduces a severe curse of dimensionality that challenges existing modeling and control approaches. As an alternative, multi-legged robots are typically controlled using low-dimensional gaits originally developed for bipeds or quadrupeds. These strategies fail to exploit the new symmetries and control opportunities that emerge in higher-dimensional systems. In this work, we develop a principled framework for discovering new control structures in multi-legged locomotion. We use geometric mechanics to reduce contact-rich locomotion planning to a graph optimization problem, and propose a spin model duality framework from statistical mechanics to exploit symmetry breaking and guide optimal gait reorganization. Using this approach, we identify an asymmetric locomotion strategy for a hexapod robot that achieves a forward speed of 0.61 body lengths per cycle (a 50% improvement over conventional gaits). The resulting asymmetry appears at both the control and hardware levels. At the control level, the body orientation oscillates asymmetrically between fast clockwise and slow counterclockwise turning phases for forward locomotion. At the hardware level, two legs on the same side remain unactuated and can be replaced with rigid parts without degrading performance. Numerical simulations and robophysical experiments validate the framework and reveal novel locomotion behaviors that emerge from symmetry reforming in high-dimensional embodied systems.
Tactile sensing enables vertical obstacle negotiation for elongate many-legged robots
Apr 11, 2025Many-legged elongated robots show promise for reliable mobility on rugged landscapes. However, most studies on these systems focus on motion planning in the 2D horizontal plane (e.g., translation and rotation) without addressing rapid vertical motion. Despite their success on mild rugged terrains, recent field tests reveal a critical need for 3D behaviors (e.g., climbing or traversing tall obstacles) in real-world application. The challenges of 3D motion planning partially lie in designing sensing and control for a complex high-degree-of-freedom system, typically with over 25 degrees of freedom. To address the first challenge, we propose a tactile antenna system that enables the robot to probe obstacles and gather information about the structure of the environment. Building on this sensory input, we develop a control framework that integrates data from the antenna and foot contact sensors to dynamically adjust the robot's vertical body undulation for effective climbing. With the addition of simple, low-bandwidth tactile sensors, a robot with high static stability and redundancy exhibits predictable climbing performance in complex environments using a simple feedback controller. Laboratory and outdoor experiments demonstrate the robot's ability to climb obstacles up to five times its height. Moreover, the robot exhibits robust climbing capabilities on obstacles covered with flowable, robot-sized random items and those characterized by rapidly changing curvatures. These findings demonstrate an alternative solution to perceive the environment and facilitate effective response for legged robots, paving ways towards future highly capable, low-profile many-legged robots.
Probabilistic approach to feedback control enhances multi-legged locomotion on rugged landscapes
Nov 11, 2024



Achieving robust legged locomotion on complex terrains poses challenges due to the high uncertainty in robot-environment interactions. Recent advances in bipedal and quadrupedal robots demonstrate good mobility on rugged terrains but rely heavily on sensors for stability due to low static stability from a high center of mass and a narrow base of support. We hypothesize that a multi-legged robotic system can leverage morphological redundancy from additional legs to minimize sensing requirements when traversing challenging terrains. Studies suggest that a multi-legged system with sufficient legs can reliably navigate noisy landscapes without sensing and control, albeit at a low speed of up to 0.1 body lengths per cycle (BLC). However, the control framework to enhance speed on challenging terrains remains underexplored due to the complex environmental interactions, making it difficult to identify the key parameters to control in these high-degree-of-freedom systems. Here, we present a bio-inspired vertical body undulation wave as a novel approach to mitigate environmental disturbances affecting robot speed, supported by experiments and probabilistic models. Finally, we introduce a control framework which monitors foot-ground contact patterns on rugose landscapes using binary foot-ground contact sensors to estimate terrain rugosity. The controller adjusts the vertical body wave based on the deviation of the limb's averaged actual-to-ideal foot-ground contact ratio, achieving a significant enhancement of up to 0.235 BLC on rugose laboratory terrain. We observed a $\sim$ 50\% increase in speed and a $\sim$ 40\% reduction in speed variance compared to the open-loop controller. Additionally, the controller operates in complex terrains outside the lab, including pine straw, robot-sized rocks, mud, and leaves.
Addition of a peristaltic wave improves multi-legged locomotion performance on complex terrains
Oct 01, 2024



Characterized by their elongate bodies and relatively simple legs, multi-legged robots have the potential to locomote through complex terrains for applications such as search-and-rescue and terrain inspection. Prior work has developed effective and reliable locomotion strategies for multi-legged robots by propagating the two waves of lateral body undulation and leg stepping, which we will refer to as the two-wave template. However, these robots have limited capability to climb over obstacles with sizes comparable to their heights. We hypothesize that such limitations stem from the two-wave template that we used to prescribe the multi-legged locomotion. Seeking effective alternative waves for obstacle-climbing, we designed a five-segment robot with static (non-actuated) legs, where each cable-driven joint has a rotational degree-of-freedom (DoF) in the sagittal plane (vertical wave) and a linear DoF (peristaltic wave). We tested robot locomotion performance on a flat terrain and a rugose terrain. While the benefit of peristalsis on flat-ground locomotion is marginal, the inclusion of a peristaltic wave substantially improves the locomotion performance in rugose terrains: it not only enables obstacle-climbing capabilities with obstacles having a similar height as the robot, but it also significantly improves the traversing capabilities of the robot in such terrains. Our results demonstrate an alternative actuation mechanism for multi-legged robots, paving the way towards all-terrain multi-legged robots.
Effective self-righting strategies for elongate multi-legged robots
Oct 01, 2024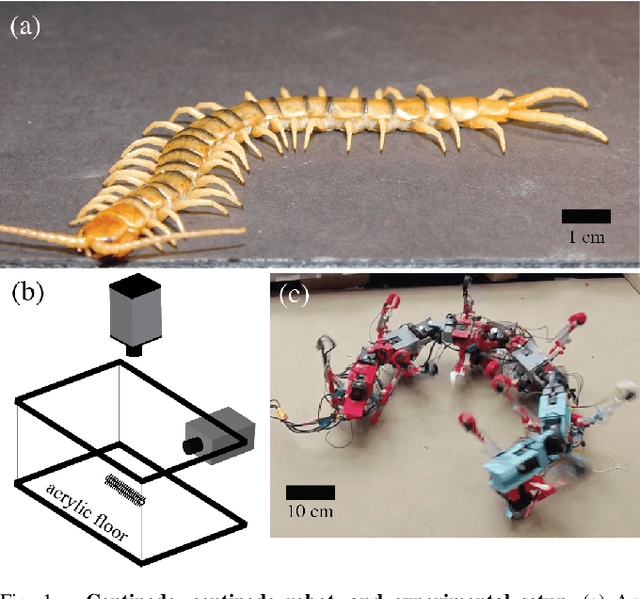
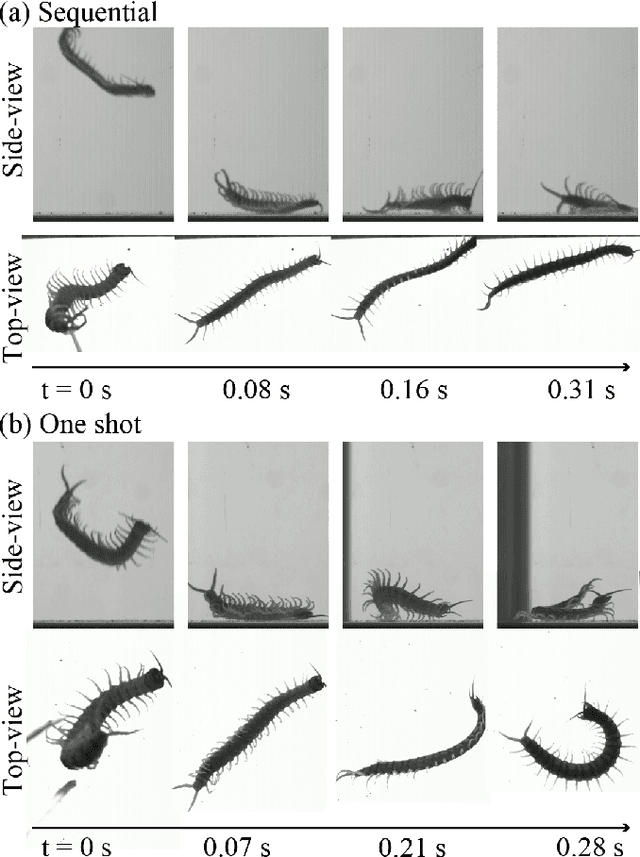
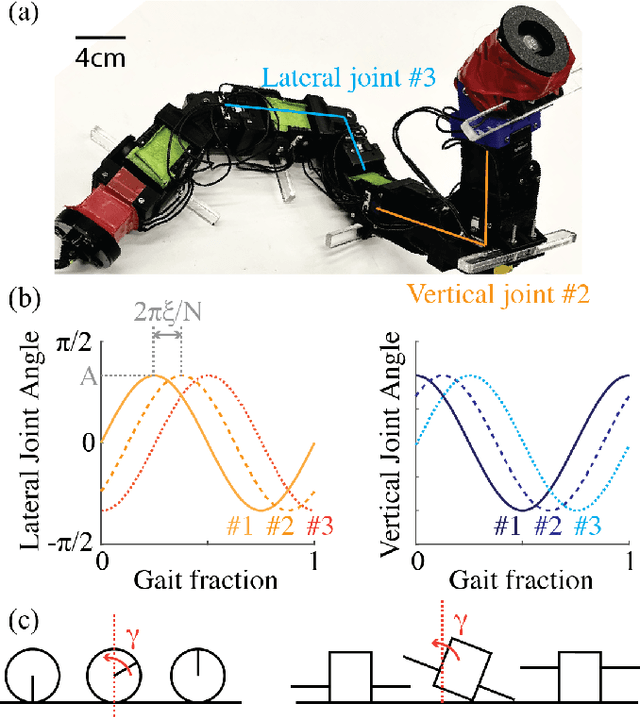
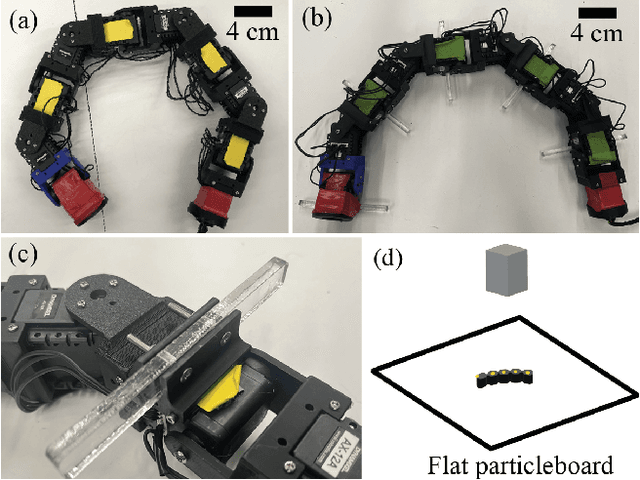
Centipede-like robots offer an effective and robust solution to navigation over complex terrain with minimal sensing. However, when climbing over obstacles, such multi-legged robots often elevate their center-of-mass into unstable configurations, where even moderate terrain uncertainty can cause tipping over. Robust mechanisms for such elongate multi-legged robots to self-right remain unstudied. Here, we developed a comparative biological and robophysical approach to investigate self-righting strategies. We first released \textit{S. polymorpha} upside down from a 10 cm height and recorded their self-righting behaviors using top and side view high-speed cameras. Using kinematic analysis, we hypothesize that these behaviors can be prescribed by two traveling waves superimposed in the body lateral and vertical planes, respectively. We tested our hypothesis on an elongate robot with static (non-actuated) limbs, and we successfully reconstructed these self-righting behaviors. We further evaluated how wave parameters affect self-righting effectiveness. We identified two key wave parameters: the spatial frequency, which characterizes the sequence of body-rolling, and the wave amplitude, which characterizes body curvature. By empirically obtaining a behavior diagram of spatial frequency and amplitude, we identify effective and versatile self-righting strategies for general elongate multi-legged robots, which greatly enhances these robots' mobility and robustness in practical applications such as agricultural terrain inspection and search-and-rescue.
Learning to enhance multi-legged robot on rugged landscapes
Sep 14, 2024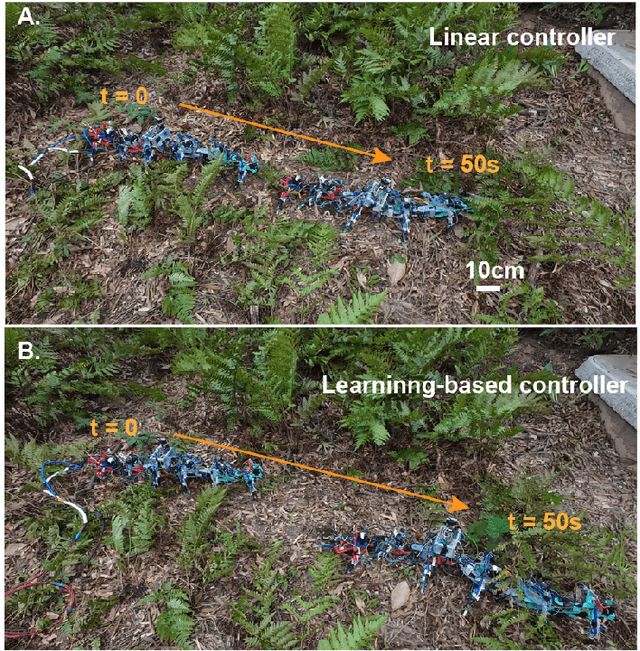
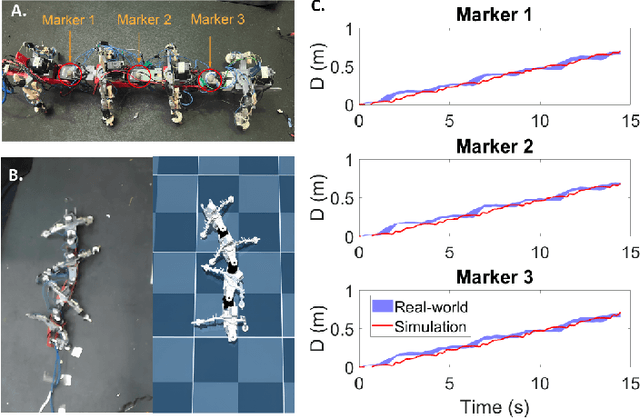
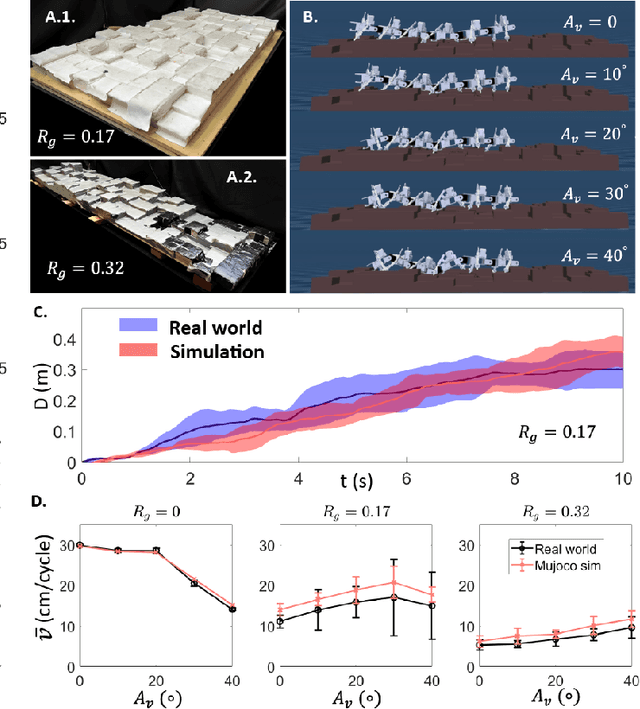
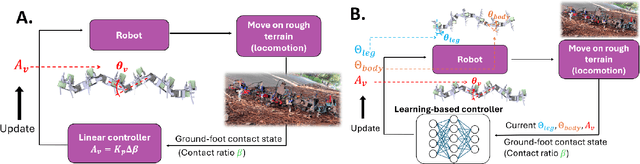
Navigating rugged landscapes poses significant challenges for legged locomotion. Multi-legged robots (those with 6 and greater) offer a promising solution for such terrains, largely due to their inherent high static stability, resulting from a low center of mass and wide base of support. Such systems require minimal effort to maintain balance. Recent studies have shown that a linear controller, which modulates the vertical body undulation of a multi-legged robot in response to shifts in terrain roughness, can ensure reliable mobility on challenging terrains. However, the potential of a learning-based control framework that adjusts multiple parameters to address terrain heterogeneity remains underexplored. We posit that the development of an experimentally validated physics-based simulator for this robot can rapidly advance capabilities by allowing wide parameter space exploration. Here we develop a MuJoCo-based simulator tailored to this robotic platform and use the simulation to develop a reinforcement learning-based control framework that dynamically adjusts horizontal and vertical body undulation, and limb stepping in real-time. Our approach improves robot performance in simulation, laboratory experiments, and outdoor tests. Notably, our real-world experiments reveal that the learning-based controller achieves a 30\% to 50\% increase in speed compared to a linear controller, which only modulates vertical body waves. We hypothesize that the superior performance of the learning-based controller arises from its ability to adjust multiple parameters simultaneously, including limb stepping, horizontal body wave, and vertical body wave.
Multi-legged matter transport: a framework for locomotion on noisy landscapes
May 08, 2023While the transport of matter by wheeled vehicles or legged robots can be guaranteed in engineered landscapes like roads or rails, locomotion prediction in complex environments like collapsed buildings or crop fields remains challenging. Inspired by principles of information transmission which allow signals to be reliably transmitted over noisy channels, we develop a ``matter transport" framework demonstrating that non-inertial locomotion can be provably generated over ``noisy" rugose landscapes (heterogeneities on the scale of locomotor dimensions). Experiments confirm that sufficient spatial redundancy in the form of serially-connected legged robots leads to reliable transport on such terrain without requiring sensing and control. Further analogies from communication theory coupled to advances in gaits (coding) and sensor-based feedback control (error detection/correction) can lead to agile locomotion in complex terradynamic regimes.
Geometry of contact: contact planning for multi-legged robots via spin models duality
Feb 07, 2023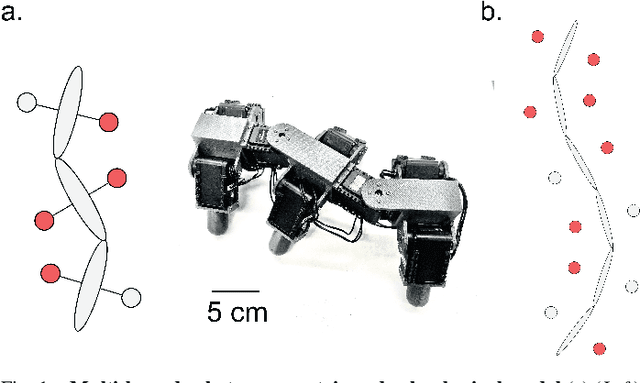
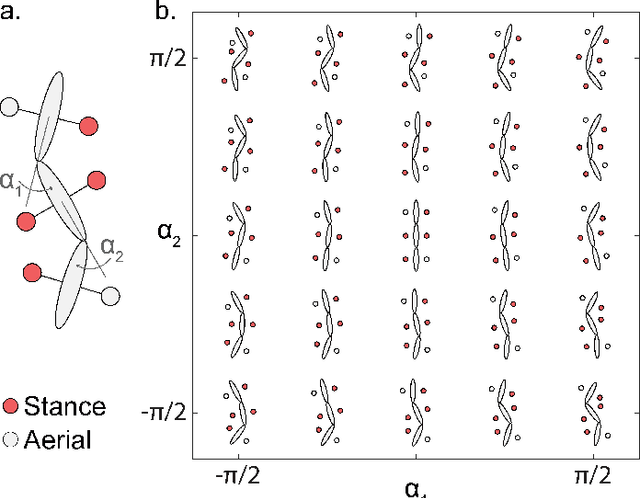
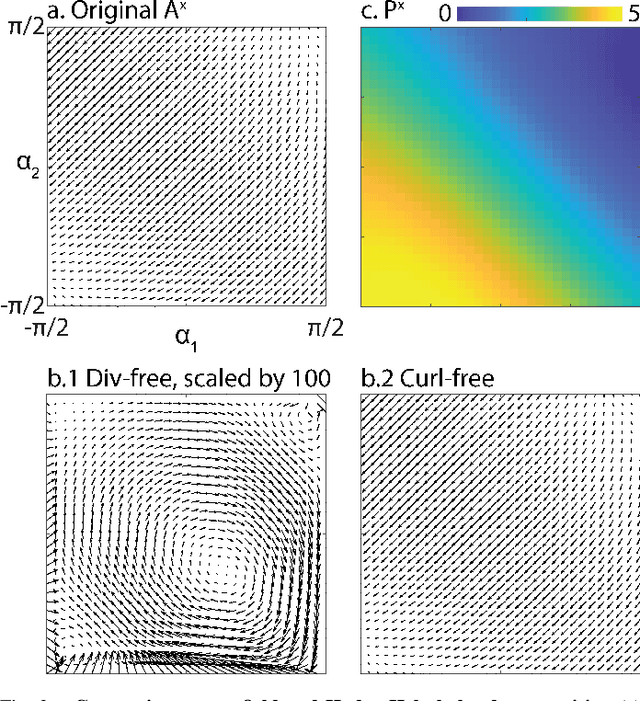
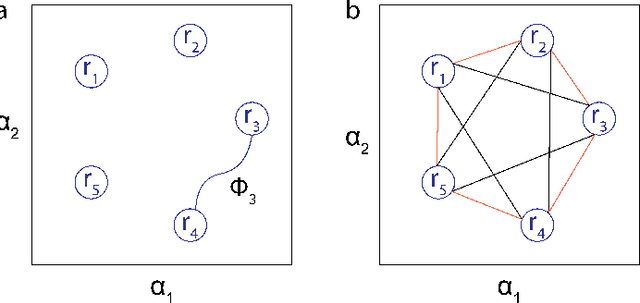
Contact planning is crucial in locomoting systems.Specifically, appropriate contact planning can enable versatile behaviors (e.g., sidewinding in limbless locomotors) and facilitate speed-dependent gait transitions (e.g., walk-trot-gallop in quadrupedal locomotors). The challenges of contact planning include determining not only the sequence by which contact is made and broken between the locomotor and the environments, but also the sequence of internal shape changes (e.g., body bending and limb shoulder joint oscillation). Most state-of-art contact planning algorithms focused on conventional robots (e.g.biped and quadruped) and conventional tasks (e.g. forward locomotion), and there is a lack of study on general contact planning in multi-legged robots. In this paper, we show that using geometric mechanics framework, we can obtain the global optimal contact sequence given the internal shape changes sequence. Therefore, we simplify the contact planning problem to a graph optimization problem to identify the internal shape changes. Taking advantages of the spatio-temporal symmetry in locomotion, we map the graph optimization problem to special cases of spin models, which allows us to obtain the global optima in polynomial time. We apply our approach to develop new forward and sidewinding behaviors in a hexapod and a 12-legged centipede. We verify our predictions using numerical and robophysical models, and obtain novel and effective locomotion behaviors.
Modeling, simulation, and optimization of a monopod hopping on yielding terrain
Oct 28, 2021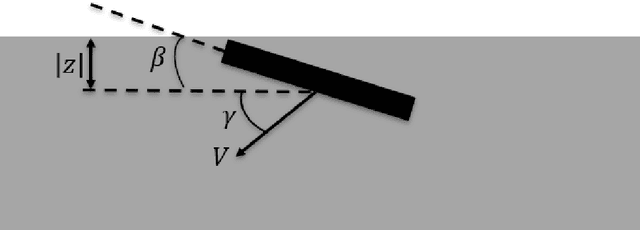
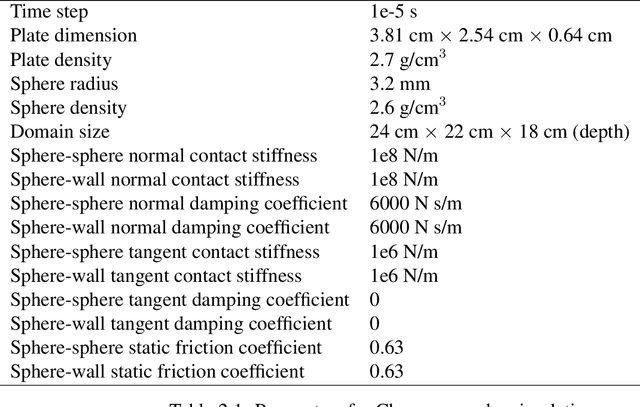
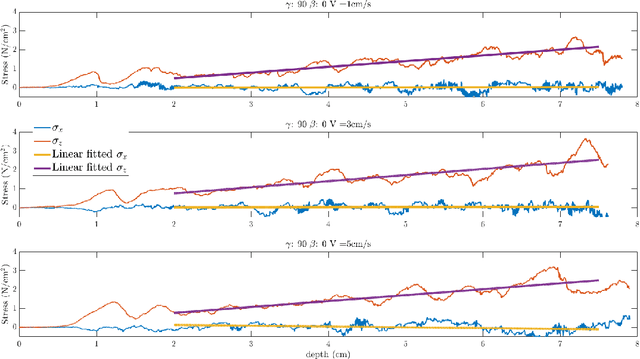
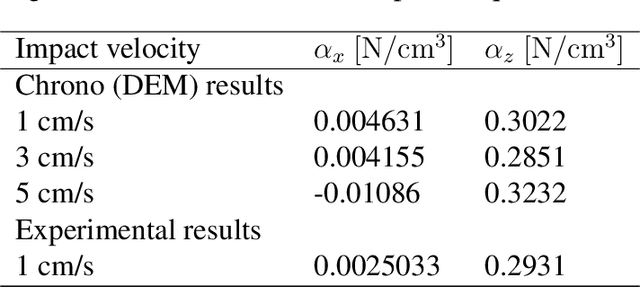
Legged locomotion on deformable terrain is a challenging and open robo-physics problem since the uncertainty in terrain dynamics introduced by ground deformation complicates the dynamical modelling and control methods. Moreover, learning how (e.g. what controls and mechanisms) to move efficiently and stably on soft ground is a bigger issue. This work seeks to control a 1D monopod hopper to jump to desired height. To achieve this goal, I first set up and validate a discrete element method (DEM) based soft ground simulation environment of a spherical granular material. With this simulation environment, I generate resistive force theory (RFT) based models of the ground reaction force. Then I use the RFT model to develop a feedforward force control for this robot. In the DEM simulation, I use feedback control to compensate for variations in the ground reaction force from the RFT model predictions. With the feedback control, the robot tracks the desired trajectories well and reaches the desired height after five hops. It reduces the apex position errors a lot more than a pure feedforward control. I also change the area of the robots square foot from 1cm^2 to 49cm^2. The feedback controller is able to deal with the ground reaction force fluctuations even when the foot dimensions are on the order of a grain diameter.