 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Robust Antenna Provides Tactile Feedback in a Multi-legged Robot
Mar 08, 2026Multi-legged elongate robots hold promise for maneuvering through complex environments. Prior work has demonstrated that reliable locomotion can be achieved using open-loop body undulation and foot placement on rugose terrain. However, robust navigation through confined spaces remains challenging when body-environment contact is extensive and terrain rheology varies rapidly. To address this challenge, we develop a pair of tactile antennae for multi-legged robots that enable real-time sensing of surrounding geometry, modeling the morphology and function of biological centipede antennae. Each antenna features gradient compliance, with a stiff base and soft tip, allowing repeated deformation and elastic recovery. Robophysical experiments reveal a relationship between continuous antenna curvature and contact force, leading to a simplified mapping from antenna deformation to inferred discrete collision states. We incorporate this mapping into a controller that selects among a set of locomotor maneuvers based on the inferred collision state. Experiments in obstacle-rich and confined environments demonstrate that tactile feedback enables reliable steering and allows the robot to recover from near-stuck conditions without requiring global environmental information or real-time vision. These results highlight how mechanically tuned tactile appendages can simplify sensing and enhance autonomy in elongate multi-legged robots operating in constrained spaces.
Agile asymmetric multi-legged locomotion: contact planning via geometric mechanics and spin model duality
Feb 09, 2026Legged robot research is presently focused on bipedal or quadrupedal robots, despite capabilities to build robots with many more legs to potentially improve locomotion performance. This imbalance is not necessarily due to hardware limitations, but rather to the absence of principled control frameworks that explain when and how additional legs improve locomotion performance. In multi-legged systems, coordinating many simultaneous contacts introduces a severe curse of dimensionality that challenges existing modeling and control approaches. As an alternative, multi-legged robots are typically controlled using low-dimensional gaits originally developed for bipeds or quadrupeds. These strategies fail to exploit the new symmetries and control opportunities that emerge in higher-dimensional systems. In this work, we develop a principled framework for discovering new control structures in multi-legged locomotion. We use geometric mechanics to reduce contact-rich locomotion planning to a graph optimization problem, and propose a spin model duality framework from statistical mechanics to exploit symmetry breaking and guide optimal gait reorganization. Using this approach, we identify an asymmetric locomotion strategy for a hexapod robot that achieves a forward speed of 0.61 body lengths per cycle (a 50% improvement over conventional gaits). The resulting asymmetry appears at both the control and hardware levels. At the control level, the body orientation oscillates asymmetrically between fast clockwise and slow counterclockwise turning phases for forward locomotion. At the hardware level, two legs on the same side remain unactuated and can be replaced with rigid parts without degrading performance. Numerical simulations and robophysical experiments validate the framework and reveal novel locomotion behaviors that emerge from symmetry reforming in high-dimensional embodied systems.
Terradynamics and design of tip-extending robotic anchors
Nov 14, 2025Most engineered pilings require substantially more force to be driven into the ground than they can resist during extraction. This requires relatively heavy equipment for insertion, which is problematic for anchoring in hard-to-access sites, including in extraterrestrial locations. In contrast, for tree roots, the external reaction force required to extract is much greater than required to insert--little more than the weight of the seed initiates insertion. This is partly due to the mechanism by which roots insert into the ground: tip extension. Proof-of-concept robotic prototypes have shown the benefits of using this mechanism, but a rigorous understanding of the underlying granular mechanics and how they inform the design of a robotic anchor is lacking. Here, we study the terradynamics of tip-extending anchors compared to traditional piling-like intruders, develop a set of design insights, and apply these to create a deployable robotic anchor. Specifically, we identify that to increase an anchor's ratio of extraction force to insertion force, it should: (i) extend beyond a critical depth; (ii) include hair-like protrusions; (iii) extend near-vertically, and (iv) incorporate multiple smaller anchors rather than a single large anchor. Synthesizing these insights, we developed a lightweight, soft robotic, root-inspired anchoring device that inserts into the ground with a reaction force less than its weight. We demonstrate that the 300 g device can deploy a series of temperature sensors 45 cm deep into loose Martian regolith simulant while anchoring with an average of 120 N, resulting in an anchoring-to-weight ratio of 40:1.
Toward Task Capable Active Matter: Learning to Avoid Clogging in Confined Collectives via Collisions
May 21, 2025



Social organisms which construct nests consisting of tunnels and chambers necessarily navigate confined and crowded conditions. Unlike low-density collectives like bird flocks and insect swarms, in which hydrodynamic and statistical phenomena dominate, the physics of glasses and supercooled fluids is important to understand clogging behaviors in high-density collectives. Our previous work revealed that fire ants flowing in confined tunnels utilize diverse behaviors like unequal workload distributions, spontaneous direction reversals, and limited interaction times to mitigate clogging and jamming and thus maintain functional flow; implementation of similar rules in a small robophysical swarm led to high performance through spontaneous dissolution of clogs and clusters. However, how the insects learn such behaviors, and how we can develop "task capable" active matter in such regimes, remains a challenge in part because interaction dynamics are dominated by local, time-consuming collisions and no single agent can guide the entire collective. Here, we hypothesized that effective flow and clog mitigation could emerge purely through local learning. We tasked small groups of robots with pellet excavation in a narrow tunnel, allowing them to modify reversal probabilities over time. Initially, robots had equal probabilities and clogs were common. Reversals improved flow. When reversal probabilities adapted via collisions and noisy tunnel length estimates, workload inequality and performance improved. Our robophysical study of an excavating swarm shows that, despite the seeming complexity and difficulty of the task, simple learning rules can mitigate or leverage unavoidable features in task-capable dense active matter, leading to hypotheses for dense biological and robotic swarms.
* 13 pages, 9 figures. Published in Frontiers in Physics, Social Physics section. Includes experimental and simulation analysis of multi-robot excavation using decentralized learning
Fault-Tolerant Multi-Robot Coordination with Limited Sensing within Confined Environments
May 21, 2025As robots are increasingly deployed to collaborate on tasks within shared workspaces and resources, the failure of an individual robot can critically affect the group's performance. This issue is particularly challenging when robots lack global information or direct communication, relying instead on social interaction for coordination and to complete their tasks. In this study, we propose a novel fault-tolerance technique leveraging physical contact interactions in multi-robot systems, specifically under conditions of limited sensing and spatial confinement. We introduce the "Active Contact Response" (ACR) method, where each robot modulates its behavior based on the likelihood of encountering an inoperative (faulty) robot. Active robots are capable of collectively repositioning stationary and faulty peers to reduce obstructions and maintain optimal group functionality. We implement our algorithm in a team of autonomous robots, equipped with contact-sensing and collision-tolerance capabilities, tasked with collectively excavating cohesive model pellets. Experimental results indicate that the ACR method significantly improves the system's recovery time from robot failures, enabling continued collective excavation with minimal performance degradation. Thus, this work demonstrates the potential of leveraging local, social, and physical interactions to enhance fault tolerance and coordination in multi-robot systems operating in constrained and extreme environments.
Collision Induced Binding and Transport of Shape Changing Robot Pairs
Apr 19, 2025



We report in experiment and simulation the spontaneous formation of dynamically bound pairs of shape changing robots undergoing locally repulsive collisions. These physical `gliders' robustly emerge from an ensemble of individually undulating three-link two-motor robots and can remain bound for hundreds of undulations and travel for multiple robot dimensions. Gliders occur in two distinct binding symmetries and form over a wide range of angular oscillation extent. This parameter sets the maximal concavity which influences formation probability and translation characteristics. Analysis of dynamics in simulation reveals the mechanism of effective dynamical attraction -- a result of the emergent interplay of appropriately oriented and timed repulsive interactions. Tactile sensing stabilizes the short-lived conformation via concavity modulation.
Tactile sensing enables vertical obstacle negotiation for elongate many-legged robots
Apr 11, 2025Many-legged elongated robots show promise for reliable mobility on rugged landscapes. However, most studies on these systems focus on motion planning in the 2D horizontal plane (e.g., translation and rotation) without addressing rapid vertical motion. Despite their success on mild rugged terrains, recent field tests reveal a critical need for 3D behaviors (e.g., climbing or traversing tall obstacles) in real-world application. The challenges of 3D motion planning partially lie in designing sensing and control for a complex high-degree-of-freedom system, typically with over 25 degrees of freedom. To address the first challenge, we propose a tactile antenna system that enables the robot to probe obstacles and gather information about the structure of the environment. Building on this sensory input, we develop a control framework that integrates data from the antenna and foot contact sensors to dynamically adjust the robot's vertical body undulation for effective climbing. With the addition of simple, low-bandwidth tactile sensors, a robot with high static stability and redundancy exhibits predictable climbing performance in complex environments using a simple feedback controller. Laboratory and outdoor experiments demonstrate the robot's ability to climb obstacles up to five times its height. Moreover, the robot exhibits robust climbing capabilities on obstacles covered with flowable, robot-sized random items and those characterized by rapidly changing curvatures. These findings demonstrate an alternative solution to perceive the environment and facilitate effective response for legged robots, paving ways towards future highly capable, low-profile many-legged robots.
Probabilistic approach to feedback control enhances multi-legged locomotion on rugged landscapes
Nov 11, 2024



Achieving robust legged locomotion on complex terrains poses challenges due to the high uncertainty in robot-environment interactions. Recent advances in bipedal and quadrupedal robots demonstrate good mobility on rugged terrains but rely heavily on sensors for stability due to low static stability from a high center of mass and a narrow base of support. We hypothesize that a multi-legged robotic system can leverage morphological redundancy from additional legs to minimize sensing requirements when traversing challenging terrains. Studies suggest that a multi-legged system with sufficient legs can reliably navigate noisy landscapes without sensing and control, albeit at a low speed of up to 0.1 body lengths per cycle (BLC). However, the control framework to enhance speed on challenging terrains remains underexplored due to the complex environmental interactions, making it difficult to identify the key parameters to control in these high-degree-of-freedom systems. Here, we present a bio-inspired vertical body undulation wave as a novel approach to mitigate environmental disturbances affecting robot speed, supported by experiments and probabilistic models. Finally, we introduce a control framework which monitors foot-ground contact patterns on rugose landscapes using binary foot-ground contact sensors to estimate terrain rugosity. The controller adjusts the vertical body wave based on the deviation of the limb's averaged actual-to-ideal foot-ground contact ratio, achieving a significant enhancement of up to 0.235 BLC on rugose laboratory terrain. We observed a $\sim$ 50\% increase in speed and a $\sim$ 40\% reduction in speed variance compared to the open-loop controller. Additionally, the controller operates in complex terrains outside the lab, including pine straw, robot-sized rocks, mud, and leaves.
Steering Elongate Multi-legged Robots By Modulating Body Undulation Waves
Oct 01, 2024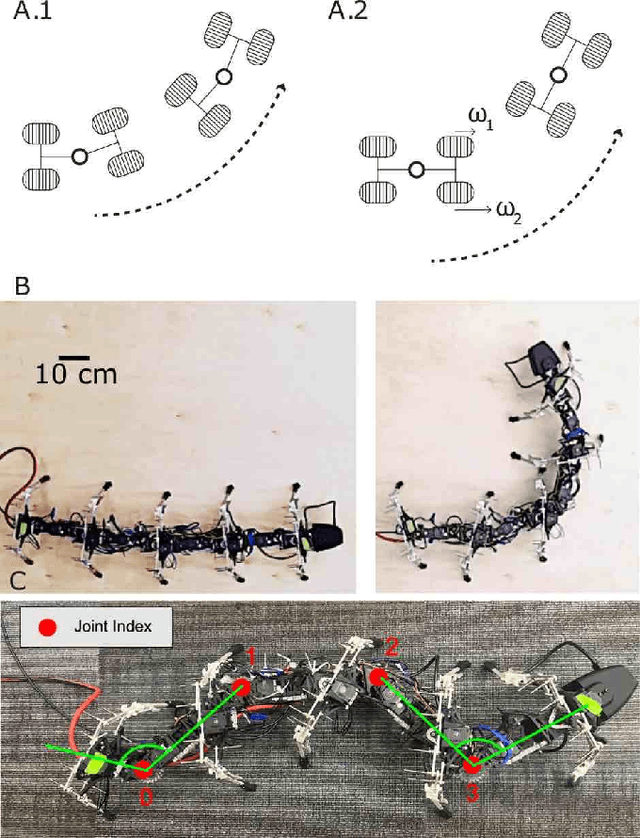
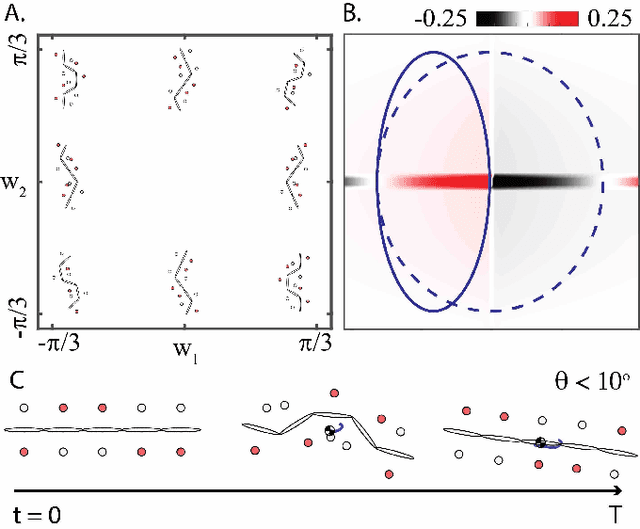
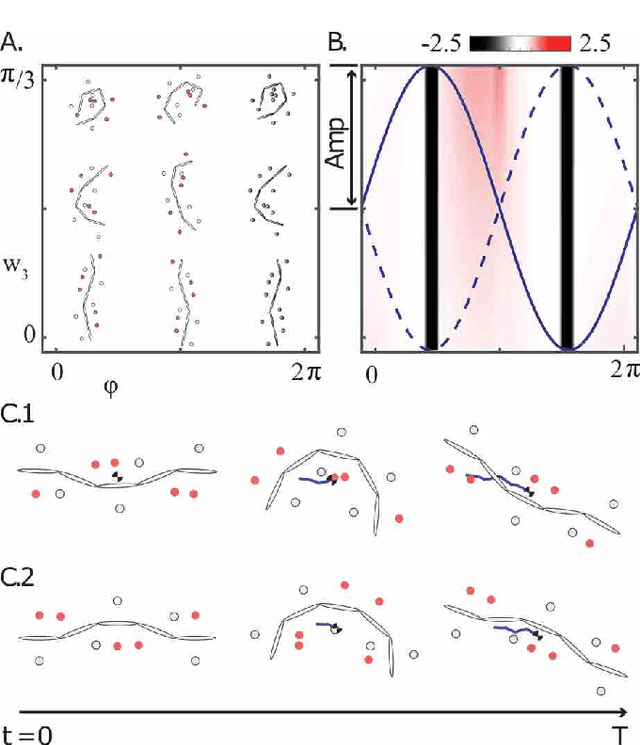
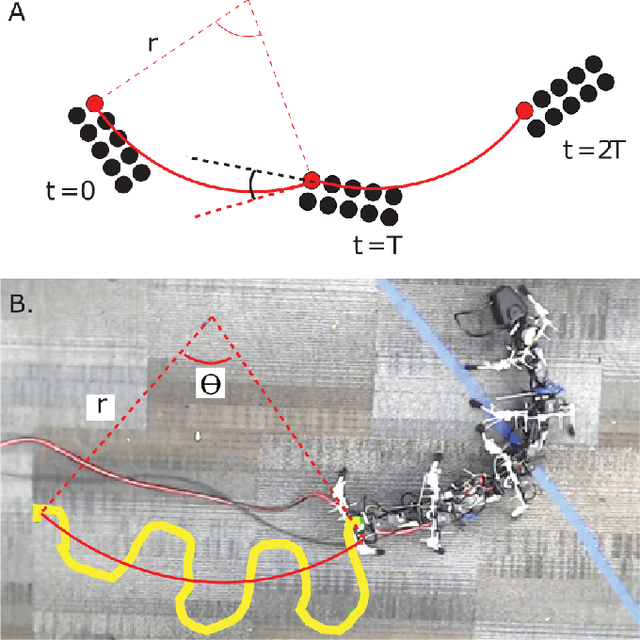
Centipedes exhibit great maneuverability in diverse environments due to their many legs and body-driven control. By leveraging similar morphologies, their robotic counterparts also demonstrate effective terrestrial locomotion. However, the success of these multi-legged robots is largely limited to forward locomotion; steering is substantially less studied, in part due to the challenges in coordinating their many body joints. Furthermore, steering behavior is complex and can include different combinations of desired rotational/translational displacement. In this paper, we explore steering strategies in multi-legged robots based on tools derived from geometric mechanics (GM). We characterize the steering motion in the plane by the rotation angle, the steering radius, and the heading direction angle. We identify an effective turning strategy by superimposing two traveling waves in the lateral body undulation and further explore variations of the "turning wave" to enable a broad spectrum of steering behaviors. By combining an amplitude modulation and a phase modulation, we develop a control strategy for steering behaviors that enables steering with a range of rotation angles (from 0{\deg} to 20{\deg}) and steering radius (from 0.28 to 0.38 body length) while keeping the heading direction angle close to 0. Lastly, we test our control framework on an elongate multi-legged robot model to verify the effectiveness of our proposed strategy. Our work demonstrates the generality of the two-wave template for effective steering of multi-legged elongate robots.
AquaMILR+: Design of an untethered limbless robot for complex aquatic terrain navigation
Sep 27, 2024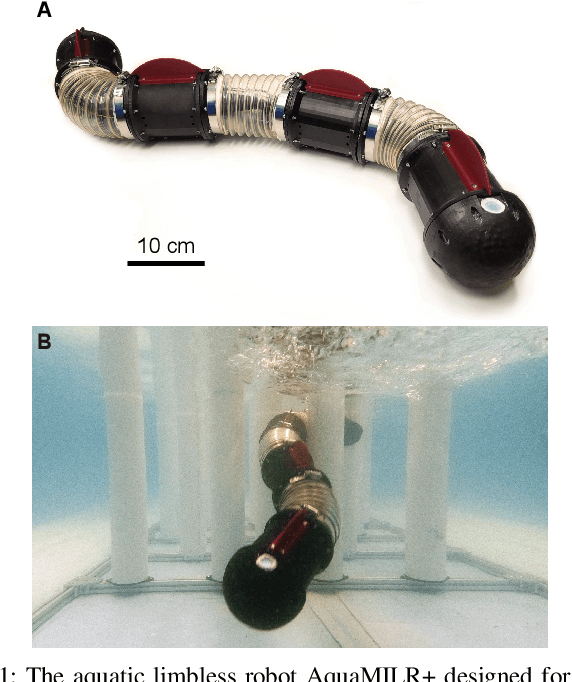
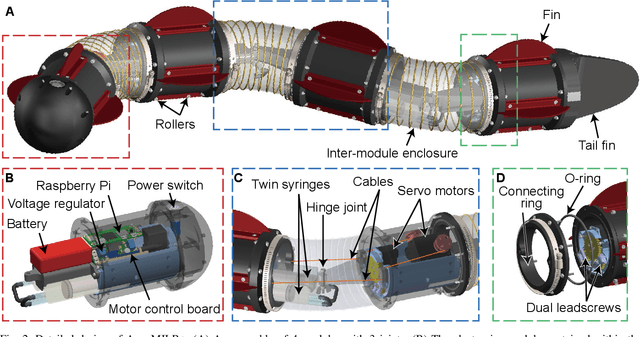

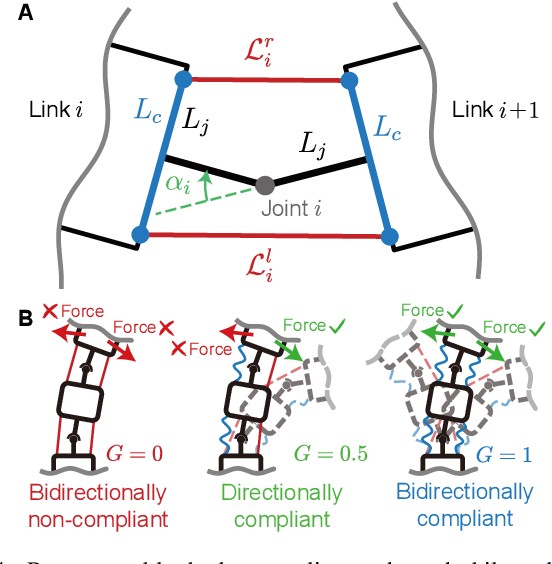
This paper presents AquaMILR+, an untethered limbless robot designed for agile navigation in complex aquatic environments. The robot features a bilateral actuation mechanism that models musculoskeletal actuation in many anguilliform swimming organisms which propagates a moving wave from head to tail allowing open fluid undulatory swimming. This actuation mechanism employs mechanical intelligence, enhancing the robot's maneuverability when interacting with obstacles. AquaMILR+ also includes a compact depth control system inspired by the swim bladder and lung structures of eels and sea snakes. The mechanism, driven by a syringe and telescoping leadscrew, enables depth and pitch control-capabilities that are difficult for most anguilliform swimming robots to achieve. Additional structures, such as fins and a tail, further improve stability and propulsion efficiency. Our tests in both open water and indoor 2D and 3D heterogeneous aquatic environments highlight AquaMILR+'s capabilities and suggest a promising system for complex underwater tasks such as search and rescue and deep-sea exploration.