 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgile asymmetric multi-legged locomotion: contact planning via geometric mechanics and spin model duality
Feb 09, 2026Legged robot research is presently focused on bipedal or quadrupedal robots, despite capabilities to build robots with many more legs to potentially improve locomotion performance. This imbalance is not necessarily due to hardware limitations, but rather to the absence of principled control frameworks that explain when and how additional legs improve locomotion performance. In multi-legged systems, coordinating many simultaneous contacts introduces a severe curse of dimensionality that challenges existing modeling and control approaches. As an alternative, multi-legged robots are typically controlled using low-dimensional gaits originally developed for bipeds or quadrupeds. These strategies fail to exploit the new symmetries and control opportunities that emerge in higher-dimensional systems. In this work, we develop a principled framework for discovering new control structures in multi-legged locomotion. We use geometric mechanics to reduce contact-rich locomotion planning to a graph optimization problem, and propose a spin model duality framework from statistical mechanics to exploit symmetry breaking and guide optimal gait reorganization. Using this approach, we identify an asymmetric locomotion strategy for a hexapod robot that achieves a forward speed of 0.61 body lengths per cycle (a 50% improvement over conventional gaits). The resulting asymmetry appears at both the control and hardware levels. At the control level, the body orientation oscillates asymmetrically between fast clockwise and slow counterclockwise turning phases for forward locomotion. At the hardware level, two legs on the same side remain unactuated and can be replaced with rigid parts without degrading performance. Numerical simulations and robophysical experiments validate the framework and reveal novel locomotion behaviors that emerge from symmetry reforming in high-dimensional embodied systems.
Each Prompt Matters: Scaling Reinforcement Learning Without Wasting Rollouts on Hundred-Billion-Scale MoE
Dec 08, 2025We present CompassMax-V3-Thinking, a hundred-billion-scale MoE reasoning model trained with a new RL framework built on one principle: each prompt must matter. Scaling RL to this size exposes critical inefficiencies-zero-variance prompts that waste rollouts, unstable importance sampling over long horizons, advantage inversion from standard reward models, and systemic bottlenecks in rollout processing. To overcome these challenges, we introduce several unified innovations: (1) Multi-Stage Zero-Variance Elimination, which filters out non-informative prompts and stabilizes group-based policy optimization (e.g. GRPO) by removing wasted rollouts; (2) ESPO, an entropy-adaptive optimization method that balances token-level and sequence-level importance sampling to maintain stable learning dynamics; (3) a Router Replay strategy that aligns training-time MoE router decisions with inference-time behavior to mitigate train-infer discrepancies, coupled with a reward model adjustment to prevent advantage inversion; (4) a high-throughput RL system with FP8-precision rollouts, overlapped reward computation, and length-aware scheduling to eliminate performance bottlenecks. Together, these contributions form a cohesive pipeline that makes RL on hundred-billion-scale MoE models stable and efficient. The resulting model delivers strong performance across both internal and public evaluations.
Probabilistic approach to feedback control enhances multi-legged locomotion on rugged landscapes
Nov 11, 2024



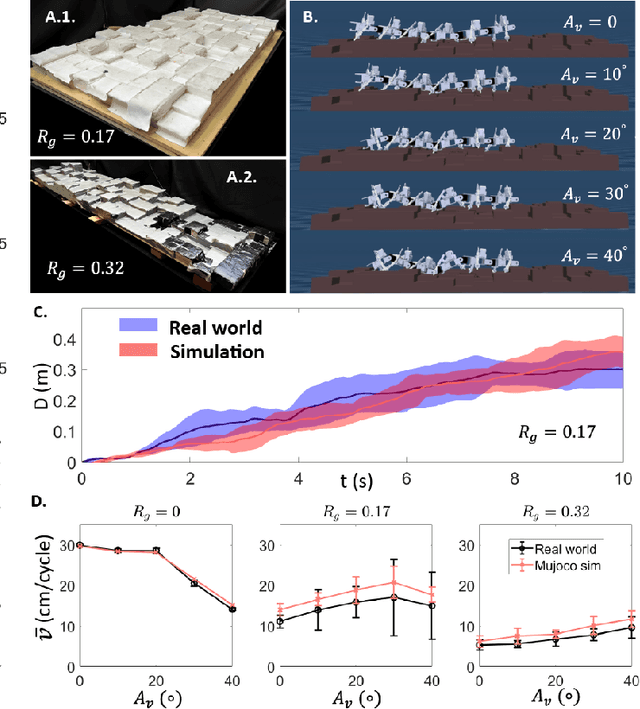
Achieving robust legged locomotion on complex terrains poses challenges due to the high uncertainty in robot-environment interactions. Recent advances in bipedal and quadrupedal robots demonstrate good mobility on rugged terrains but rely heavily on sensors for stability due to low static stability from a high center of mass and a narrow base of support. We hypothesize that a multi-legged robotic system can leverage morphological redundancy from additional legs to minimize sensing requirements when traversing challenging terrains. Studies suggest that a multi-legged system with sufficient legs can reliably navigate noisy landscapes without sensing and control, albeit at a low speed of up to 0.1 body lengths per cycle (BLC). However, the control framework to enhance speed on challenging terrains remains underexplored due to the complex environmental interactions, making it difficult to identify the key parameters to control in these high-degree-of-freedom systems. Here, we present a bio-inspired vertical body undulation wave as a novel approach to mitigate environmental disturbances affecting robot speed, supported by experiments and probabilistic models. Finally, we introduce a control framework which monitors foot-ground contact patterns on rugose landscapes using binary foot-ground contact sensors to estimate terrain rugosity. The controller adjusts the vertical body wave based on the deviation of the limb's averaged actual-to-ideal foot-ground contact ratio, achieving a significant enhancement of up to 0.235 BLC on rugose laboratory terrain. We observed a $\sim$ 50\% increase in speed and a $\sim$ 40\% reduction in speed variance compared to the open-loop controller. Additionally, the controller operates in complex terrains outside the lab, including pine straw, robot-sized rocks, mud, and leaves.
Addition of a peristaltic wave improves multi-legged locomotion performance on complex terrains
Oct 01, 2024



Characterized by their elongate bodies and relatively simple legs, multi-legged robots have the potential to locomote through complex terrains for applications such as search-and-rescue and terrain inspection. Prior work has developed effective and reliable locomotion strategies for multi-legged robots by propagating the two waves of lateral body undulation and leg stepping, which we will refer to as the two-wave template. However, these robots have limited capability to climb over obstacles with sizes comparable to their heights. We hypothesize that such limitations stem from the two-wave template that we used to prescribe the multi-legged locomotion. Seeking effective alternative waves for obstacle-climbing, we designed a five-segment robot with static (non-actuated) legs, where each cable-driven joint has a rotational degree-of-freedom (DoF) in the sagittal plane (vertical wave) and a linear DoF (peristaltic wave). We tested robot locomotion performance on a flat terrain and a rugose terrain. While the benefit of peristalsis on flat-ground locomotion is marginal, the inclusion of a peristaltic wave substantially improves the locomotion performance in rugose terrains: it not only enables obstacle-climbing capabilities with obstacles having a similar height as the robot, but it also significantly improves the traversing capabilities of the robot in such terrains. Our results demonstrate an alternative actuation mechanism for multi-legged robots, paving the way towards all-terrain multi-legged robots.
Learning to enhance multi-legged robot on rugged landscapes
Sep 14, 2024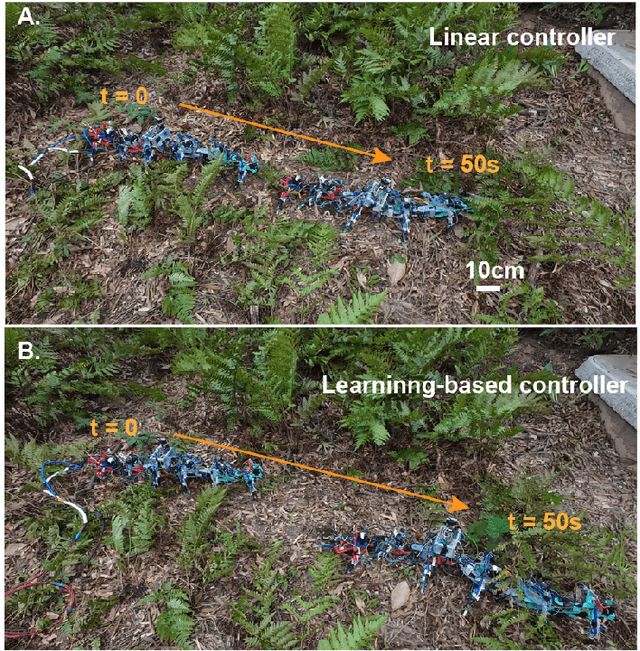
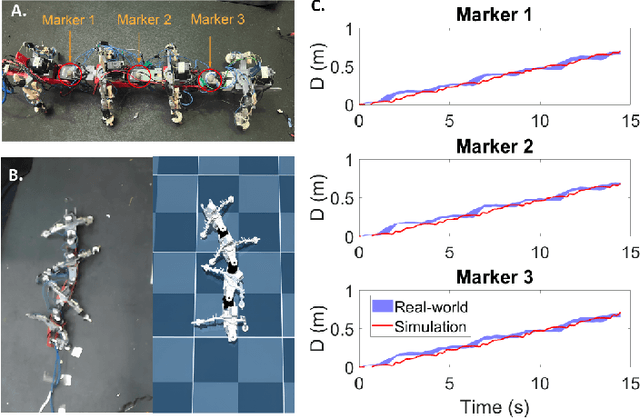
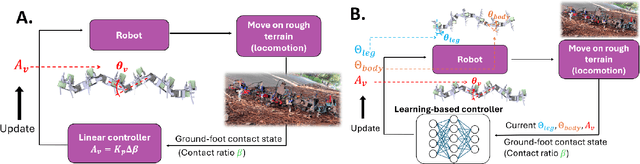
Navigating rugged landscapes poses significant challenges for legged locomotion. Multi-legged robots (those with 6 and greater) offer a promising solution for such terrains, largely due to their inherent high static stability, resulting from a low center of mass and wide base of support. Such systems require minimal effort to maintain balance. Recent studies have shown that a linear controller, which modulates the vertical body undulation of a multi-legged robot in response to shifts in terrain roughness, can ensure reliable mobility on challenging terrains. However, the potential of a learning-based control framework that adjusts multiple parameters to address terrain heterogeneity remains underexplored. We posit that the development of an experimentally validated physics-based simulator for this robot can rapidly advance capabilities by allowing wide parameter space exploration. Here we develop a MuJoCo-based simulator tailored to this robotic platform and use the simulation to develop a reinforcement learning-based control framework that dynamically adjusts horizontal and vertical body undulation, and limb stepping in real-time. Our approach improves robot performance in simulation, laboratory experiments, and outdoor tests. Notably, our real-world experiments reveal that the learning-based controller achieves a 30\% to 50\% increase in speed compared to a linear controller, which only modulates vertical body waves. We hypothesize that the superior performance of the learning-based controller arises from its ability to adjust multiple parameters simultaneously, including limb stepping, horizontal body wave, and vertical body wave.