 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTactile sensing enables vertical obstacle negotiation for elongate many-legged robots
Apr 11, 2025Many-legged elongated robots show promise for reliable mobility on rugged landscapes. However, most studies on these systems focus on motion planning in the 2D horizontal plane (e.g., translation and rotation) without addressing rapid vertical motion. Despite their success on mild rugged terrains, recent field tests reveal a critical need for 3D behaviors (e.g., climbing or traversing tall obstacles) in real-world application. The challenges of 3D motion planning partially lie in designing sensing and control for a complex high-degree-of-freedom system, typically with over 25 degrees of freedom. To address the first challenge, we propose a tactile antenna system that enables the robot to probe obstacles and gather information about the structure of the environment. Building on this sensory input, we develop a control framework that integrates data from the antenna and foot contact sensors to dynamically adjust the robot's vertical body undulation for effective climbing. With the addition of simple, low-bandwidth tactile sensors, a robot with high static stability and redundancy exhibits predictable climbing performance in complex environments using a simple feedback controller. Laboratory and outdoor experiments demonstrate the robot's ability to climb obstacles up to five times its height. Moreover, the robot exhibits robust climbing capabilities on obstacles covered with flowable, robot-sized random items and those characterized by rapidly changing curvatures. These findings demonstrate an alternative solution to perceive the environment and facilitate effective response for legged robots, paving ways towards future highly capable, low-profile many-legged robots.
Effective self-righting strategies for elongate multi-legged robots
Oct 01, 2024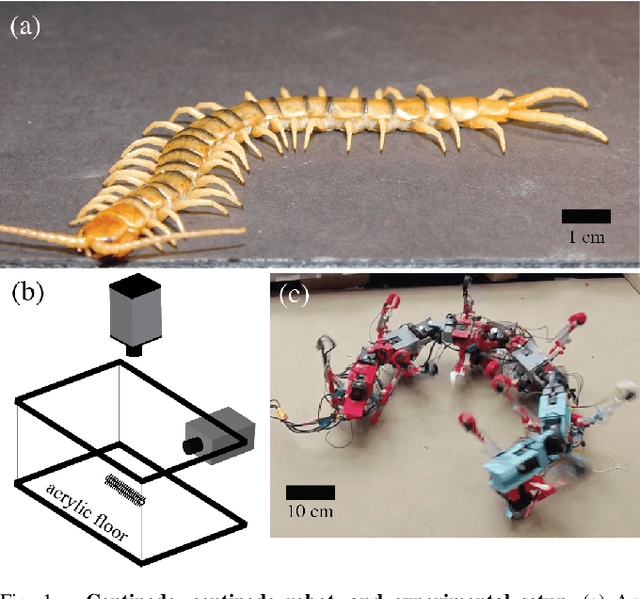
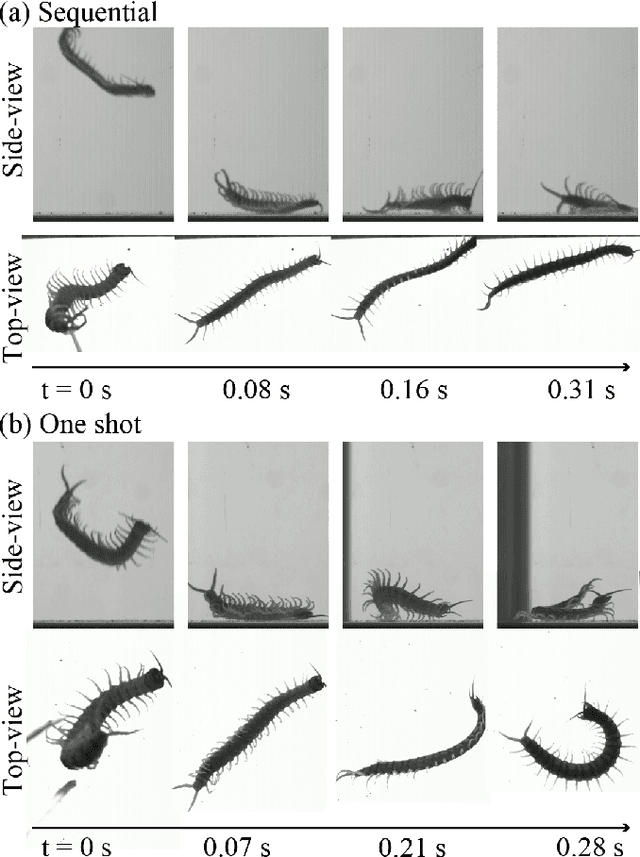
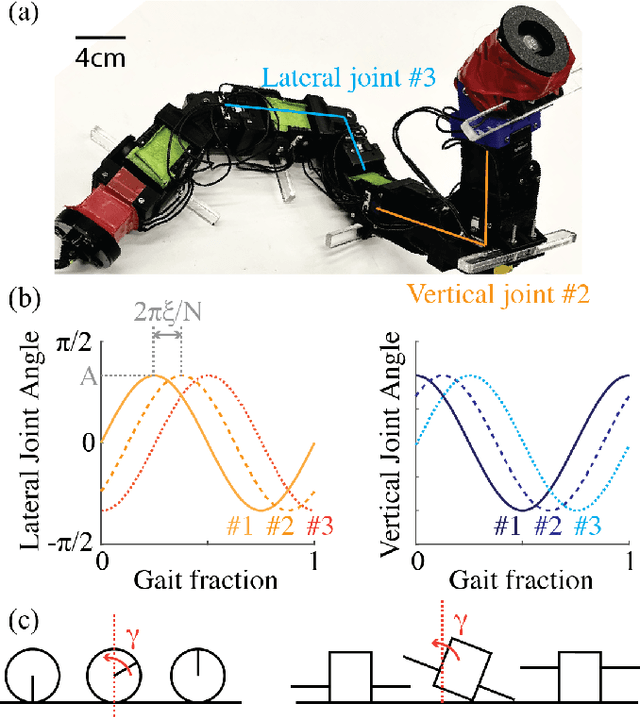
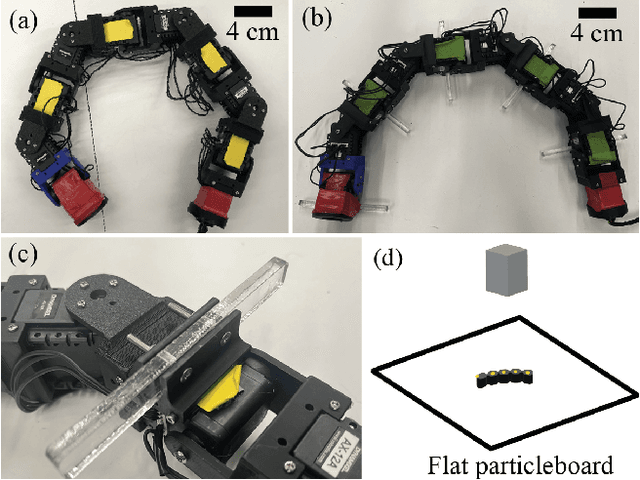
Centipede-like robots offer an effective and robust solution to navigation over complex terrain with minimal sensing. However, when climbing over obstacles, such multi-legged robots often elevate their center-of-mass into unstable configurations, where even moderate terrain uncertainty can cause tipping over. Robust mechanisms for such elongate multi-legged robots to self-right remain unstudied. Here, we developed a comparative biological and robophysical approach to investigate self-righting strategies. We first released \textit{S. polymorpha} upside down from a 10 cm height and recorded their self-righting behaviors using top and side view high-speed cameras. Using kinematic analysis, we hypothesize that these behaviors can be prescribed by two traveling waves superimposed in the body lateral and vertical planes, respectively. We tested our hypothesis on an elongate robot with static (non-actuated) limbs, and we successfully reconstructed these self-righting behaviors. We further evaluated how wave parameters affect self-righting effectiveness. We identified two key wave parameters: the spatial frequency, which characterizes the sequence of body-rolling, and the wave amplitude, which characterizes body curvature. By empirically obtaining a behavior diagram of spatial frequency and amplitude, we identify effective and versatile self-righting strategies for general elongate multi-legged robots, which greatly enhances these robots' mobility and robustness in practical applications such as agricultural terrain inspection and search-and-rescue.
Addition of a peristaltic wave improves multi-legged locomotion performance on complex terrains
Oct 01, 2024



Characterized by their elongate bodies and relatively simple legs, multi-legged robots have the potential to locomote through complex terrains for applications such as search-and-rescue and terrain inspection. Prior work has developed effective and reliable locomotion strategies for multi-legged robots by propagating the two waves of lateral body undulation and leg stepping, which we will refer to as the two-wave template. However, these robots have limited capability to climb over obstacles with sizes comparable to their heights. We hypothesize that such limitations stem from the two-wave template that we used to prescribe the multi-legged locomotion. Seeking effective alternative waves for obstacle-climbing, we designed a five-segment robot with static (non-actuated) legs, where each cable-driven joint has a rotational degree-of-freedom (DoF) in the sagittal plane (vertical wave) and a linear DoF (peristaltic wave). We tested robot locomotion performance on a flat terrain and a rugose terrain. While the benefit of peristalsis on flat-ground locomotion is marginal, the inclusion of a peristaltic wave substantially improves the locomotion performance in rugose terrains: it not only enables obstacle-climbing capabilities with obstacles having a similar height as the robot, but it also significantly improves the traversing capabilities of the robot in such terrains. Our results demonstrate an alternative actuation mechanism for multi-legged robots, paving the way towards all-terrain multi-legged robots.