 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision Induced Binding and Transport of Shape Changing Robot Pairs
Apr 19, 2025



We report in experiment and simulation the spontaneous formation of dynamically bound pairs of shape changing robots undergoing locally repulsive collisions. These physical `gliders' robustly emerge from an ensemble of individually undulating three-link two-motor robots and can remain bound for hundreds of undulations and travel for multiple robot dimensions. Gliders occur in two distinct binding symmetries and form over a wide range of angular oscillation extent. This parameter sets the maximal concavity which influences formation probability and translation characteristics. Analysis of dynamics in simulation reveals the mechanism of effective dynamical attraction -- a result of the emergent interplay of appropriately oriented and timed repulsive interactions. Tactile sensing stabilizes the short-lived conformation via concavity modulation.
Steering Elongate Multi-legged Robots By Modulating Body Undulation Waves
Oct 01, 2024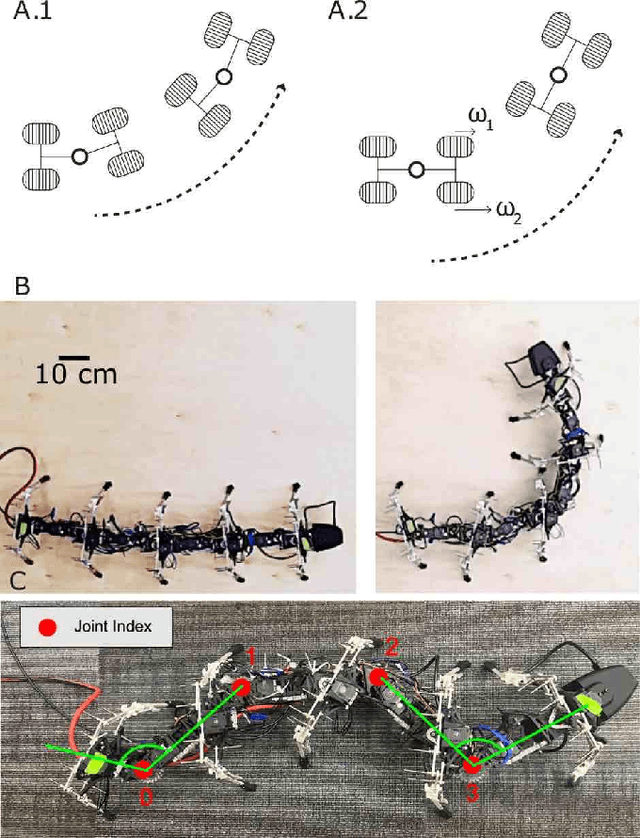
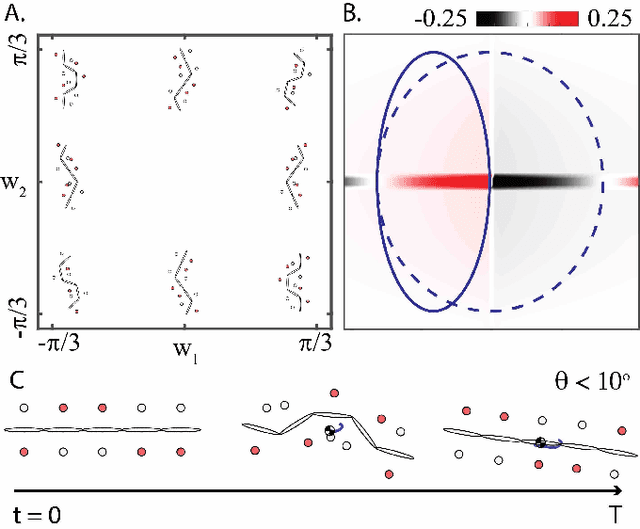
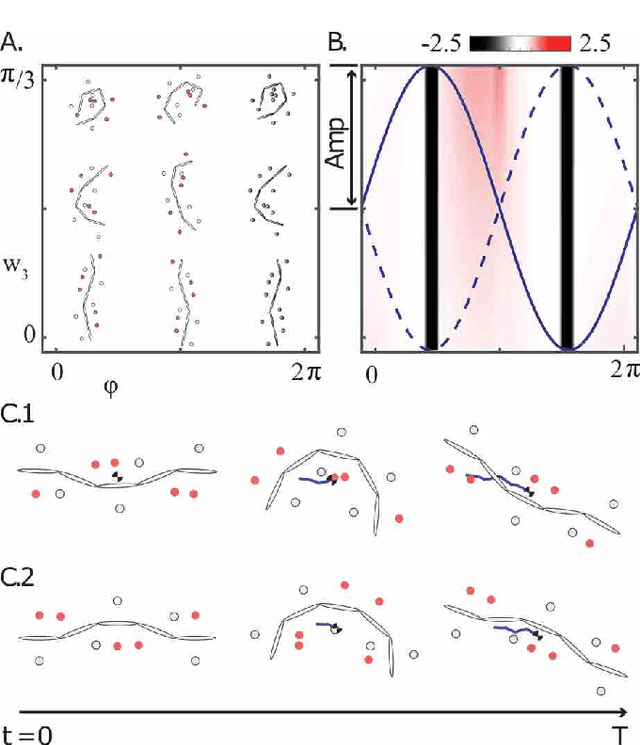
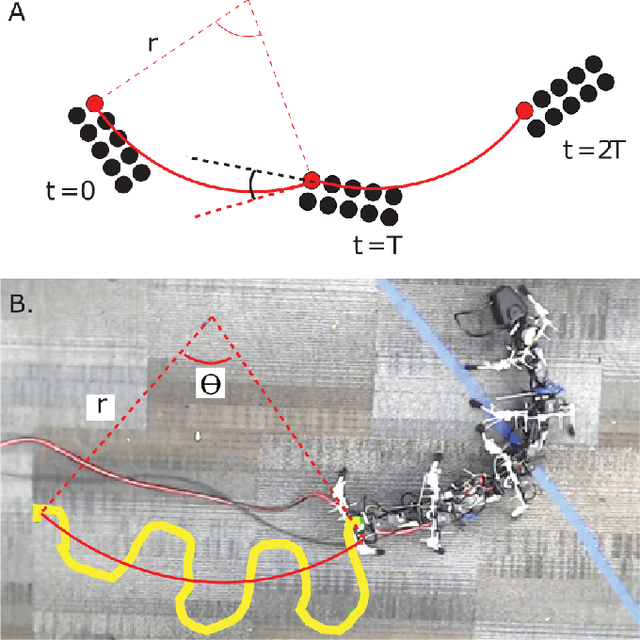
Centipedes exhibit great maneuverability in diverse environments due to their many legs and body-driven control. By leveraging similar morphologies, their robotic counterparts also demonstrate effective terrestrial locomotion. However, the success of these multi-legged robots is largely limited to forward locomotion; steering is substantially less studied, in part due to the challenges in coordinating their many body joints. Furthermore, steering behavior is complex and can include different combinations of desired rotational/translational displacement. In this paper, we explore steering strategies in multi-legged robots based on tools derived from geometric mechanics (GM). We characterize the steering motion in the plane by the rotation angle, the steering radius, and the heading direction angle. We identify an effective turning strategy by superimposing two traveling waves in the lateral body undulation and further explore variations of the "turning wave" to enable a broad spectrum of steering behaviors. By combining an amplitude modulation and a phase modulation, we develop a control strategy for steering behaviors that enables steering with a range of rotation angles (from 0{\deg} to 20{\deg}) and steering radius (from 0.28 to 0.38 body length) while keeping the heading direction angle close to 0. Lastly, we test our control framework on an elongate multi-legged robot model to verify the effectiveness of our proposed strategy. Our work demonstrates the generality of the two-wave template for effective steering of multi-legged elongate robots.
Addition of a peristaltic wave improves multi-legged locomotion performance on complex terrains
Oct 01, 2024



Characterized by their elongate bodies and relatively simple legs, multi-legged robots have the potential to locomote through complex terrains for applications such as search-and-rescue and terrain inspection. Prior work has developed effective and reliable locomotion strategies for multi-legged robots by propagating the two waves of lateral body undulation and leg stepping, which we will refer to as the two-wave template. However, these robots have limited capability to climb over obstacles with sizes comparable to their heights. We hypothesize that such limitations stem from the two-wave template that we used to prescribe the multi-legged locomotion. Seeking effective alternative waves for obstacle-climbing, we designed a five-segment robot with static (non-actuated) legs, where each cable-driven joint has a rotational degree-of-freedom (DoF) in the sagittal plane (vertical wave) and a linear DoF (peristaltic wave). We tested robot locomotion performance on a flat terrain and a rugose terrain. While the benefit of peristalsis on flat-ground locomotion is marginal, the inclusion of a peristaltic wave substantially improves the locomotion performance in rugose terrains: it not only enables obstacle-climbing capabilities with obstacles having a similar height as the robot, but it also significantly improves the traversing capabilities of the robot in such terrains. Our results demonstrate an alternative actuation mechanism for multi-legged robots, paving the way towards all-terrain multi-legged robots.
Effective self-righting strategies for elongate multi-legged robots
Oct 01, 2024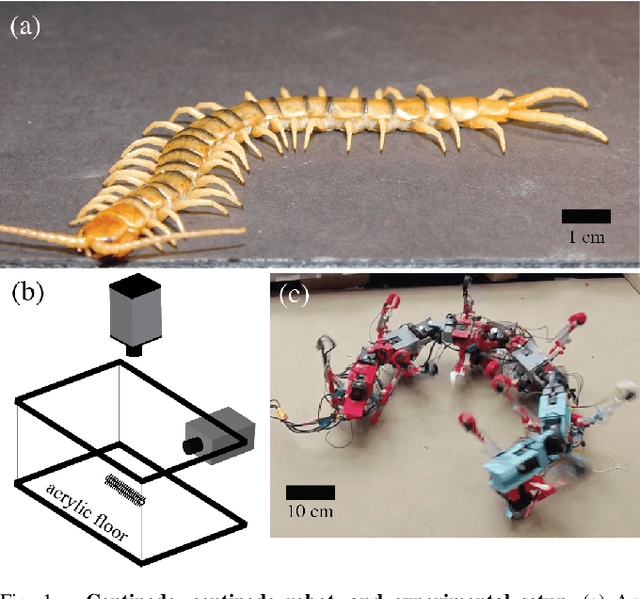
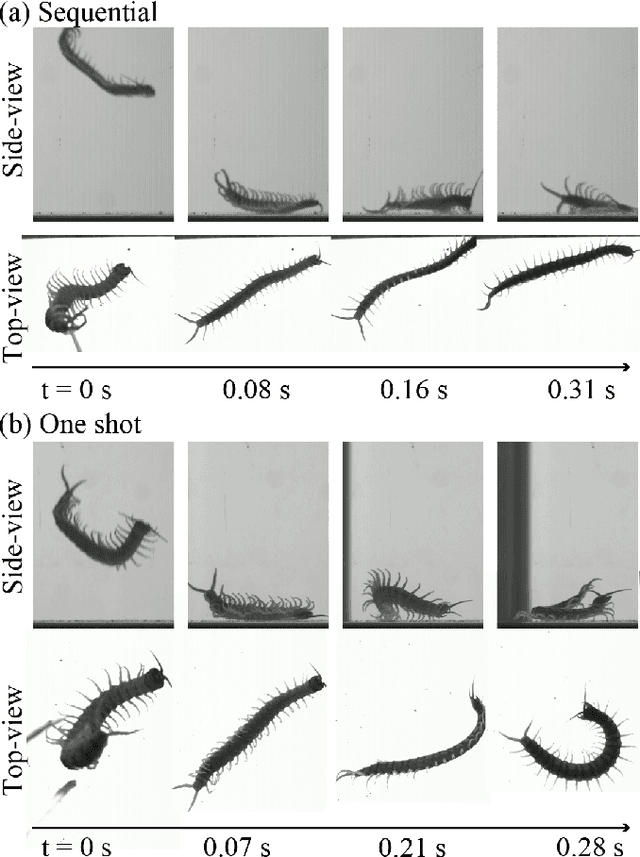
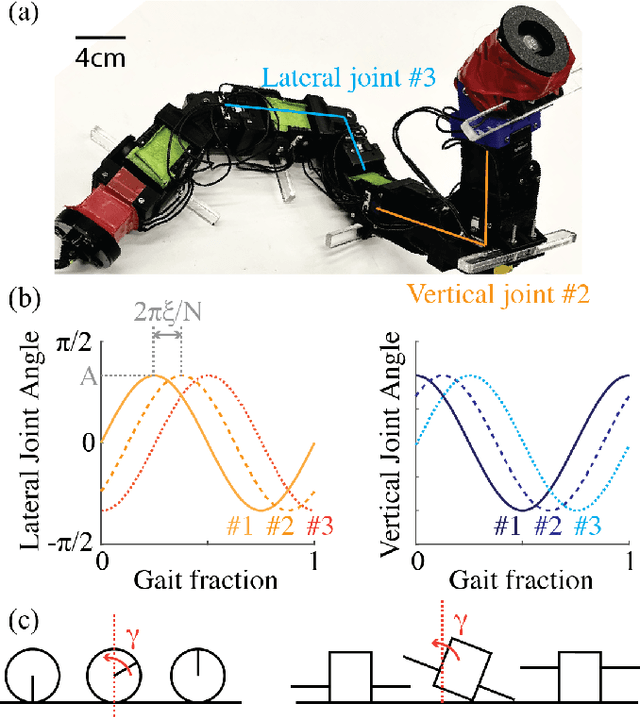
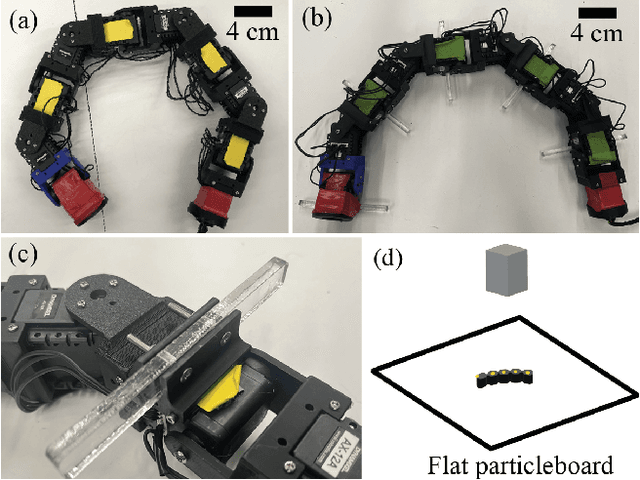
Centipede-like robots offer an effective and robust solution to navigation over complex terrain with minimal sensing. However, when climbing over obstacles, such multi-legged robots often elevate their center-of-mass into unstable configurations, where even moderate terrain uncertainty can cause tipping over. Robust mechanisms for such elongate multi-legged robots to self-right remain unstudied. Here, we developed a comparative biological and robophysical approach to investigate self-righting strategies. We first released \textit{S. polymorpha} upside down from a 10 cm height and recorded their self-righting behaviors using top and side view high-speed cameras. Using kinematic analysis, we hypothesize that these behaviors can be prescribed by two traveling waves superimposed in the body lateral and vertical planes, respectively. We tested our hypothesis on an elongate robot with static (non-actuated) limbs, and we successfully reconstructed these self-righting behaviors. We further evaluated how wave parameters affect self-righting effectiveness. We identified two key wave parameters: the spatial frequency, which characterizes the sequence of body-rolling, and the wave amplitude, which characterizes body curvature. By empirically obtaining a behavior diagram of spatial frequency and amplitude, we identify effective and versatile self-righting strategies for general elongate multi-legged robots, which greatly enhances these robots' mobility and robustness in practical applications such as agricultural terrain inspection and search-and-rescue.
Learning manipulation of steep granular slopes for fast Mini Rover turning
Oct 02, 2023Future planetary exploration missions will require reaching challenging regions such as craters and steep slopes. Such regions are ubiquitous and present science-rich targets potentially containing information regarding the planet's internal structure. Steep slopes consisting of low-cohesion regolith are prone to flow downward under small disturbances, making it very challenging for autonomous rovers to traverse. Moreover, the navigation trajectories of rovers are heavily limited by the terrain topology and future systems will need to maneuver on flowable surfaces without getting trapped, allowing them to further expand their reach and increase mission efficiency. In this work, we used a laboratory-scale rover robot and performed maneuvering experiments on a steep granular slope of poppy seeds to explore the rover's turning capabilities. The rover is capable of lifting, sweeping, and spinning its wheels, allowing it to execute leg-like gait patterns. The high-dimensional actuation capabilities of the rover facilitate effective manipulation of the underlying granular surface. We used Bayesian Optimization (BO) to gain insight into successful turning gaits in high dimensional search space and found strategies such as differential wheel spinning and pivoting around a single sweeping wheel. We then used these insights to further fine-tune the turning gait, enabling the rover to turn 90 degrees at just above 4 seconds with minimal slip. Combining gait optimization and human-tuning approaches, we found that fast turning is empowered by creating anisotropic torques with the sweeping wheel.
Multi-legged matter transport: a framework for locomotion on noisy landscapes
May 08, 2023While the transport of matter by wheeled vehicles or legged robots can be guaranteed in engineered landscapes like roads or rails, locomotion prediction in complex environments like collapsed buildings or crop fields remains challenging. Inspired by principles of information transmission which allow signals to be reliably transmitted over noisy channels, we develop a ``matter transport" framework demonstrating that non-inertial locomotion can be provably generated over ``noisy" rugose landscapes (heterogeneities on the scale of locomotor dimensions). Experiments confirm that sufficient spatial redundancy in the form of serially-connected legged robots leads to reliable transport on such terrain without requiring sensing and control. Further analogies from communication theory coupled to advances in gaits (coding) and sensor-based feedback control (error detection/correction) can lead to agile locomotion in complex terradynamic regimes.