 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSteering Elongate Multi-legged Robots By Modulating Body Undulation Waves
Paper and Code
Oct 01, 2024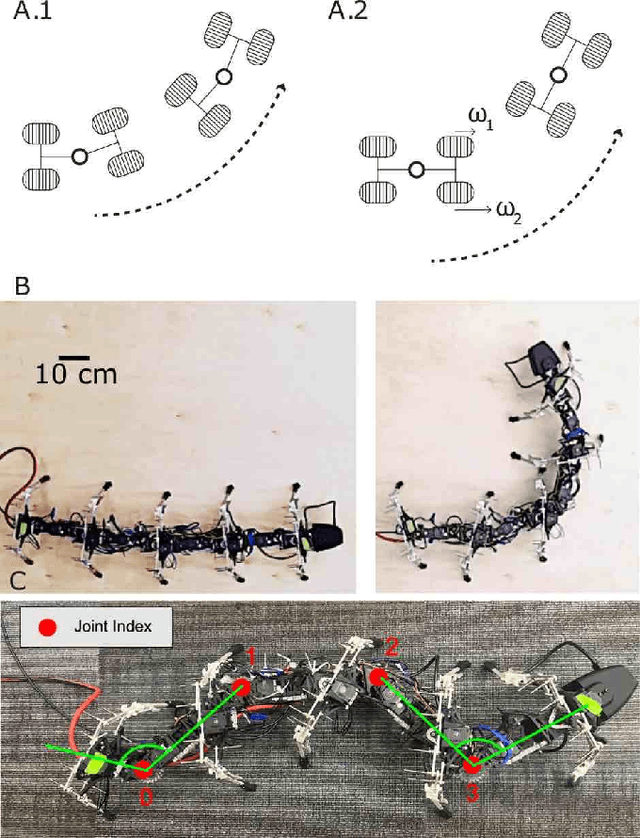
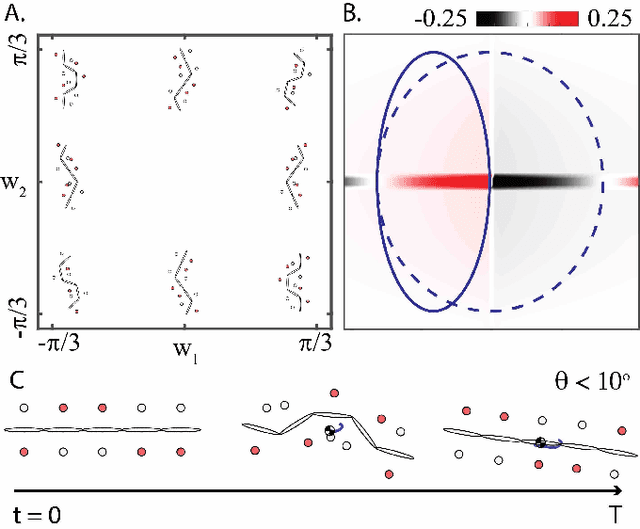
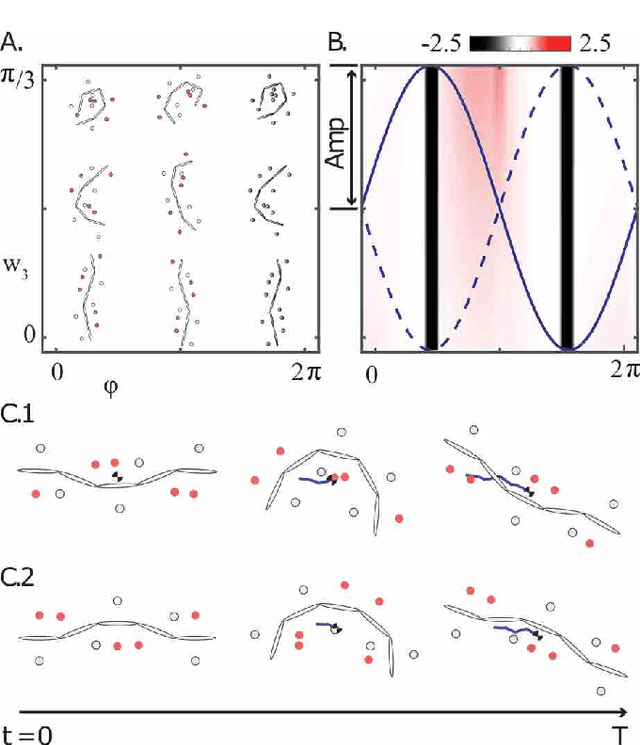
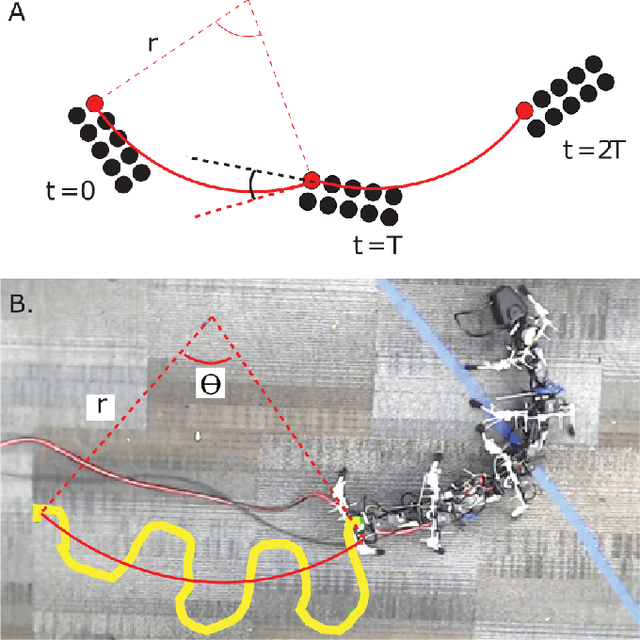
Centipedes exhibit great maneuverability in diverse environments due to their many legs and body-driven control. By leveraging similar morphologies, their robotic counterparts also demonstrate effective terrestrial locomotion. However, the success of these multi-legged robots is largely limited to forward locomotion; steering is substantially less studied, in part due to the challenges in coordinating their many body joints. Furthermore, steering behavior is complex and can include different combinations of desired rotational/translational displacement. In this paper, we explore steering strategies in multi-legged robots based on tools derived from geometric mechanics (GM). We characterize the steering motion in the plane by the rotation angle, the steering radius, and the heading direction angle. We identify an effective turning strategy by superimposing two traveling waves in the lateral body undulation and further explore variations of the "turning wave" to enable a broad spectrum of steering behaviors. By combining an amplitude modulation and a phase modulation, we develop a control strategy for steering behaviors that enables steering with a range of rotation angles (from 0{\deg} to 20{\deg}) and steering radius (from 0.28 to 0.38 body length) while keeping the heading direction angle close to 0. Lastly, we test our control framework on an elongate multi-legged robot model to verify the effectiveness of our proposed strategy. Our work demonstrates the generality of the two-wave template for effective steering of multi-legged elongate robots.