 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision Induced Binding and Transport of Shape Changing Robot Pairs
Apr 19, 2025



We report in experiment and simulation the spontaneous formation of dynamically bound pairs of shape changing robots undergoing locally repulsive collisions. These physical `gliders' robustly emerge from an ensemble of individually undulating three-link two-motor robots and can remain bound for hundreds of undulations and travel for multiple robot dimensions. Gliders occur in two distinct binding symmetries and form over a wide range of angular oscillation extent. This parameter sets the maximal concavity which influences formation probability and translation characteristics. Analysis of dynamics in simulation reveals the mechanism of effective dynamical attraction -- a result of the emergent interplay of appropriately oriented and timed repulsive interactions. Tactile sensing stabilizes the short-lived conformation via concavity modulation.
Detection of Disease on Nasal Breath Sound by New Lightweight Architecture: Using COVID-19 as An Example
Apr 01, 2025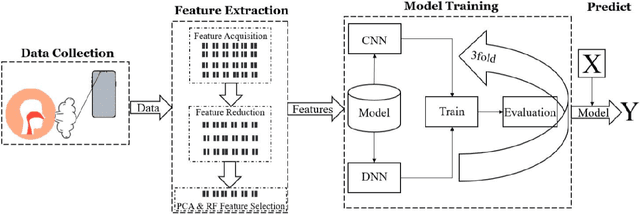



Background. Infectious diseases, particularly COVID-19, continue to be a significant global health issue. Although many countries have reduced or stopped large-scale testing measures, the detection of such diseases remains a propriety. Objective. This study aims to develop a novel, lightweight deep neural network for efficient, accurate, and cost-effective detection of COVID-19 using a nasal breathing audio data collected via smartphones. Methodology. Nasal breathing audio from 128 patients diagnosed with the Omicron variant was collected. Mel-Frequency Cepstral Coefficients (MFCCs), a widely used feature in speech and sound analysis, were employed for extracting important characteristics from the audio signals. Additional feature selection was performed using Random Forest (RF) and Principal Component Analysis (PCA) for dimensionality reduction. A Dense-ReLU-Dropout model was trained with K-fold cross-validation (K=3), and performance metrics like accuracy, precision, recall, and F1-score were used to evaluate the model. Results. The proposed model achieved 97% accuracy in detecting COVID-19 from nasal breathing sounds, outperforming state-of-the-art methods such as those by [23] and [13]. Our Dense-ReLU-Dropout model, using RF and PCA for feature selection, achieves high accuracy with greater computational efficiency compared to existing methods that require more complex models or larger datasets. Conclusion. The findings suggest that the proposed method holds significant potential for clinical implementation, advancing smartphone-based diagnostics in infectious diseases. The Dense-ReLU-Dropout model, combined with innovative feature processing techniques, offers a promising approach for efficient and accurate COVID-19 detection, showcasing the capabilities of mobile device-based diagnostics
Robophysical modeling of spacetime dynamics
Feb 10, 2022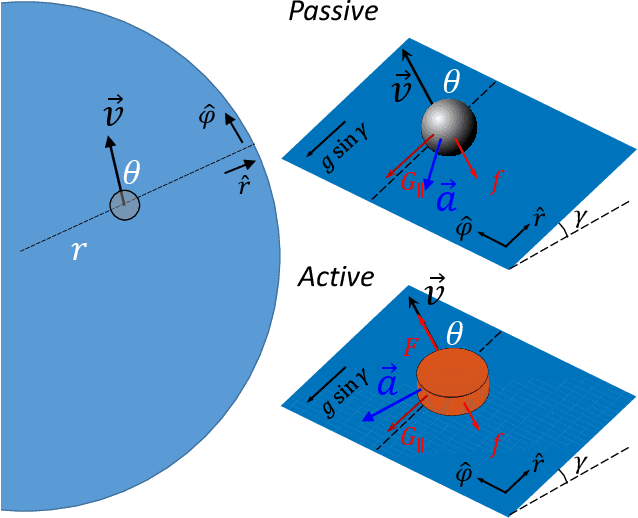
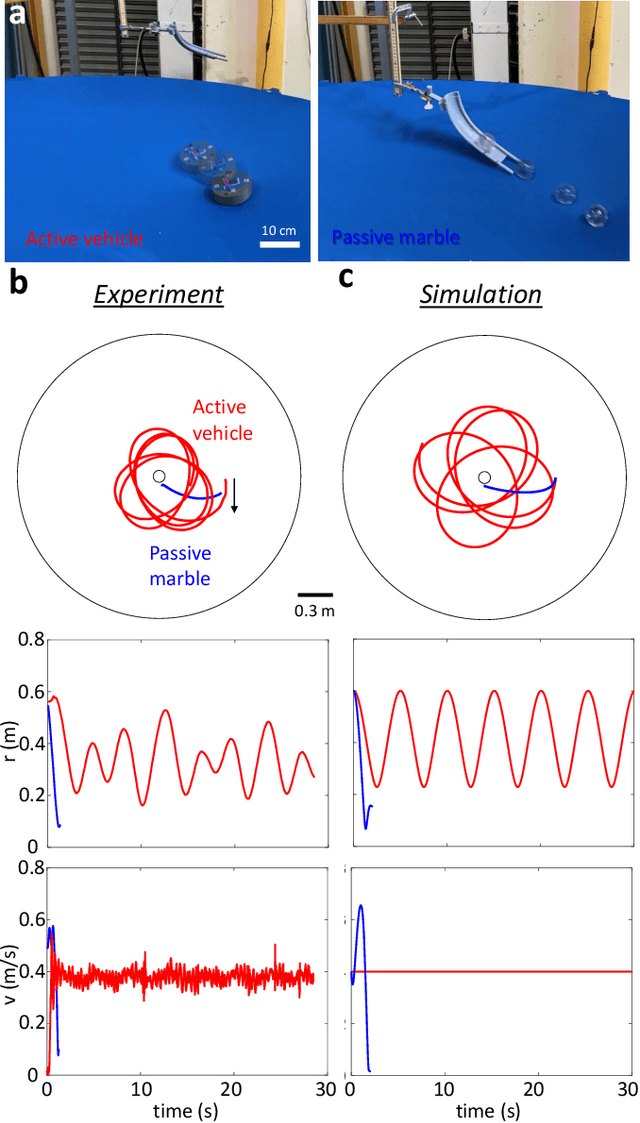
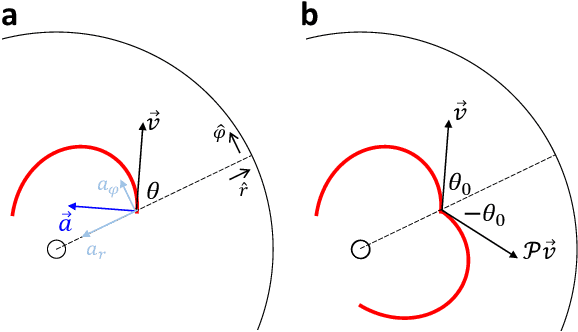

Systems consisting of spheres rolling on elastic membranes have been used as educational tools to introduce a core conceptual idea of General Relativity (GR): how curvature guides the movement of matter. However, previous studies have revealed that such schemes cannot accurately represent relativistic dynamics in the laboratory. Dissipative forces cause the initially GR-like dynamics to be transient and consequently restrict experimental study to only the beginnings of trajectories; dominance of Earth's gravity forbids the difference between spatial and temporal spacetime curvatures. Here by developing a mapping between dynamics of a wheeled vehicle on a spandex membrane, we demonstrate that an active object that can prescribe its speed can not only obtain steady-state orbits, but also use the additional parameters such as speed to tune the orbits towards relativistic dynamics. Our mapping demonstrates how activity mixes space and time in a metric, shows how active particles do not necessarily follow geodesics in the real space but instead follow geodesics in a fiducial spacetime. The mapping further reveals how parameters such as the membrane elasticity and instantaneous speed allow programming a desired spacetime such as the Schwarzschild metric near a non-rotating black hole. Our mapping and framework point the way to the possibility to create a robophysical analog gravity system in the laboratory at low cost and provide insights into active matter in deformable environments and robot exploration in complex landscapes.
Programming Active Granular Matter with Mechanically Induced Phase Changes
Sep 12, 2020Emergent behavior of particles on a lattice has been analyzed extensively in mathematics with possible analogies to physical phenomena such as clustering in colloidal systems. While there exists a rich pool of interesting results, most are yet to be explored physically due to the lack of experimental validation. Here we show how the individual moves of robotic agents are tightly mapped to a discrete algorithm and the emergent behaviors such as clustering are as predicted by the analysis of this algorithm. Taking advantage of the algorithmic perspective, we further designed robotic controls to manipulate the clustering behavior and show the potential for useful applications such as the transport of obstacles.
Self-propulsion on spandex: toward a robotic analog gravity system
Apr 07, 2020
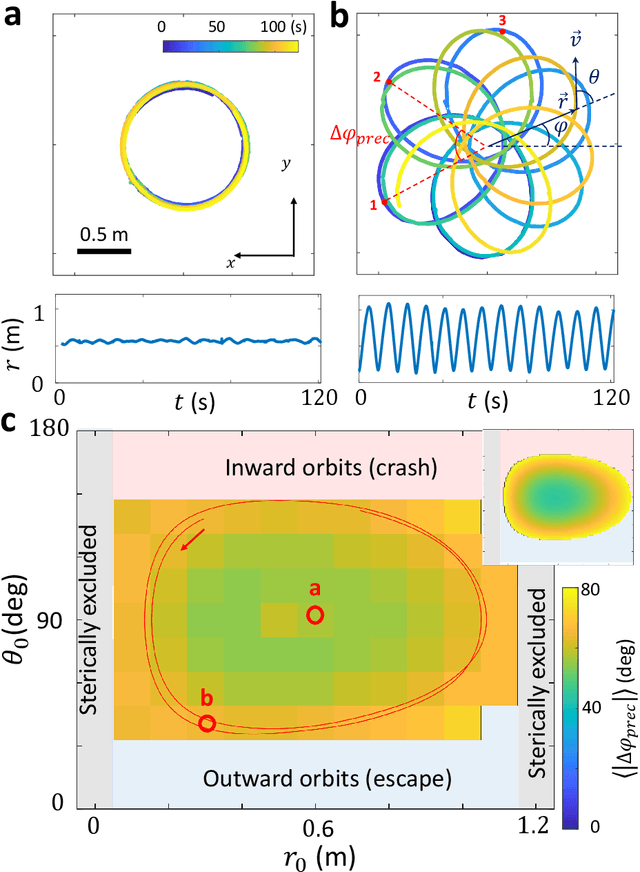
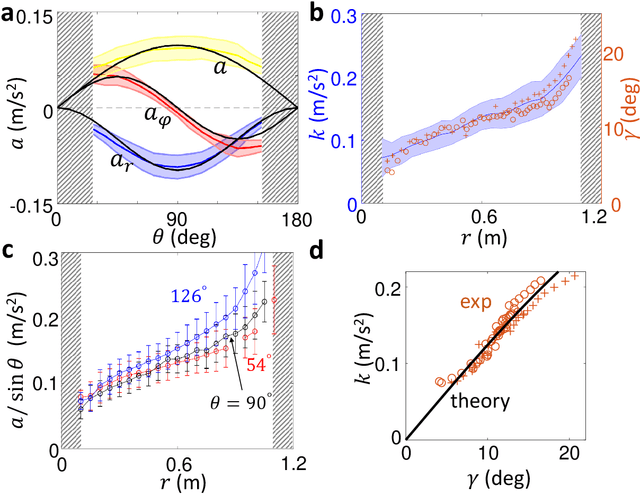
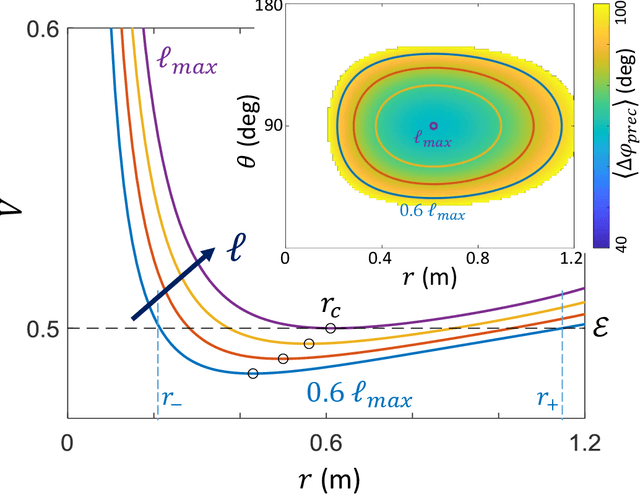
Numerous laboratory systems have been proposed as analogs to study phenomena (like black holes, Hawking radiation) associated with Einstein's theory of General Relativity (GR) but which are challenging to study in experimental or simulated astrophysical settings. Such analogs, typically acoustic, fluid, or atomic systems require delicate manipulation. Here we introduce a robotic system that captures aspects of Einstein-like dynamics in curved spacetime and creates a path toward a mechatronic analog gravity system. The system consists of a wheeled robotic vehicle transiting a deformable elastic membrane. With a fixed central depression in the membrane (mimicking a massive body), the vehicle paths around the depression resemble the dynamics observed near general-relativistic compact objects (e.g. black holes). We recast the vehicle plus membrane dynamics in physical space into geodesic motion of a so-called "test particle" in a fiducial curved space-time. The mapping facilitates understanding of how vehicle characteristics (e.g. mass) can be modified to change precession dynamics. Since an important aspect of GR is the coupling of matter and spacetime (which influence each other) we also study the dynamics of a two-robot system interacting solely via local membrane deformations. For a range of masses, we observe vehicle "attraction"; initially separated robots converge and collide. A control scheme in which a robot senses its local tilt angle and adjusts its speed enables it to escape capture. Our system provides a path towards a readily tunable analog gravity system and can aid design and control of locomoting devices (e.g. water walkers) that couple strongly to their environments.
Phototactic Supersmarticles
Nov 03, 2017



Smarticles, or smart active particles, are small robots equipped with only basic movement and sensing abilities that are incapable of rotating or displacing individually. We study the ensemble behavior of smarticles, i.e., the behavior a collective of these very simple computational elements can achieve, and how such behavior can be implemented using minimal programming. We show that an ensemble of smarticles constrained to remain close to one another (which we call a supersmarticle), achieves directed locomotion toward or away from a light source, a phenomenon known as phototaxing. We present experimental and theoretical models of phototactic supersmarticles that collectively move with a directed displacement in response to light. The motion of the supersmarticle is approximately Brownian, and is a result of chaotic interactions among smarticles. The system can be directed by introducing asymmetries among the individual smarticle's behavior, in our case by varying activity levels in response to light, resulting in supersmarticle biased motion.