 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepTTV: Deep Learning Prediction of Hidden Exoplanet From Transit Timing Variations
Sep 06, 2024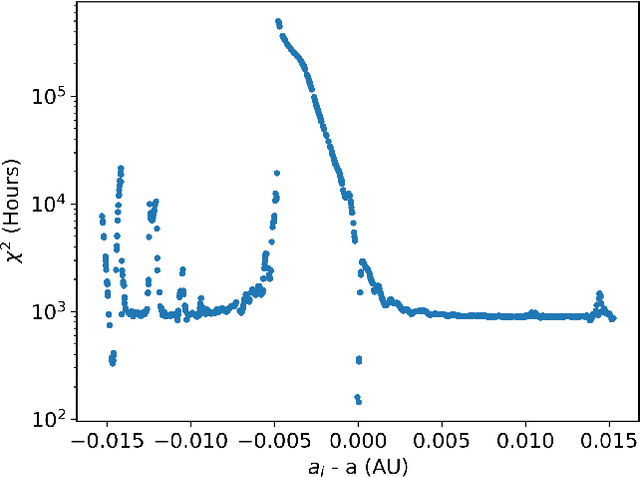
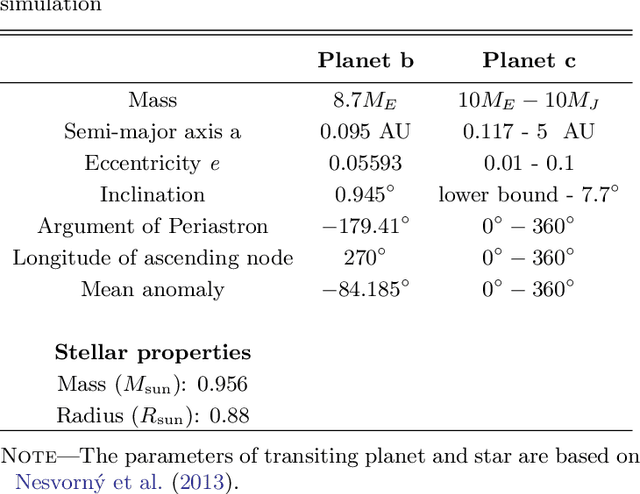
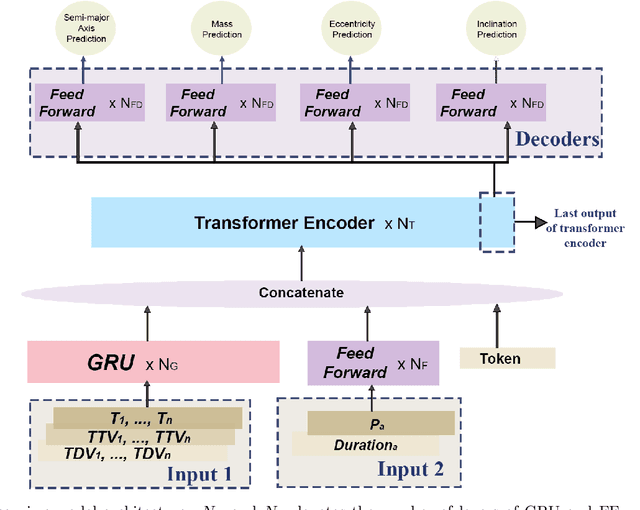
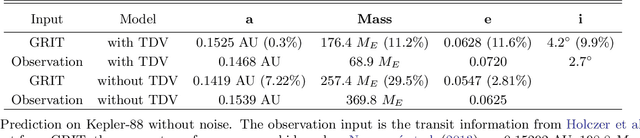
Transit timing variation (TTV) provides rich information about the mass and orbital properties of exoplanets, which are often obtained by solving an inverse problem via Markov Chain Monte Carlo (MCMC). In this paper, we design a new data-driven approach, which potentially can be applied to problems that are hard to traditional MCMC methods, such as the case with only one planet transiting. Specifically, we use a deep learning approach to predict the parameters of non-transit companion for the single transit system with transit information (i.e., TTV, and Transit Duration Variation (TDV)) as input. Thanks to a newly constructed \textit{Transformer}-based architecture that can extract long-range interactions from TTV sequential data, this previously difficult task can now be accomplished with high accuracy, with an overall fractional error of $\sim$2\% on mass and eccentricity.
Data-driven discovery of non-Newtonian astronomy via learning non-Euclidean Hamiltonian
Sep 30, 2022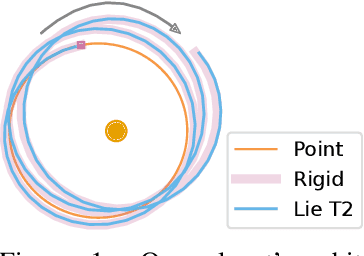
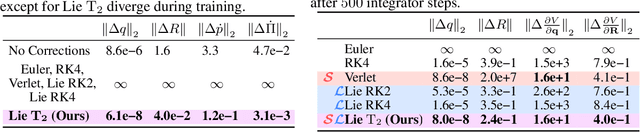
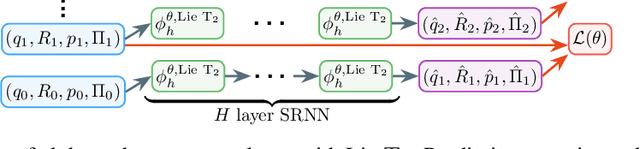
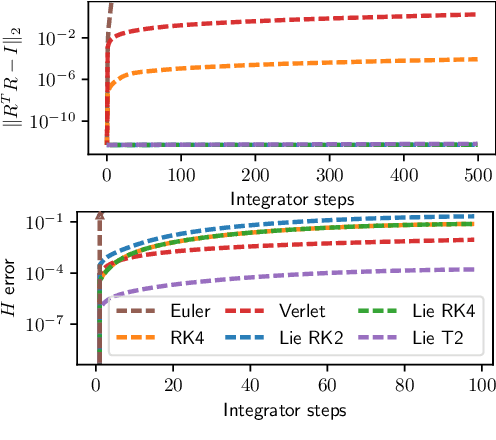
Incorporating the Hamiltonian structure of physical dynamics into deep learning models provides a powerful way to improve the interpretability and prediction accuracy. While previous works are mostly limited to the Euclidean spaces, their extension to the Lie group manifold is needed when rotations form a key component of the dynamics, such as the higher-order physics beyond simple point-mass dynamics for N-body celestial interactions. Moreover, the multiscale nature of these processes presents a challenge to existing methods as a long time horizon is required. By leveraging a symplectic Lie-group manifold preserving integrator, we present a method for data-driven discovery of non-Newtonian astronomy. Preliminary results show the importance of both these properties in training stability and prediction accuracy.
Robophysical modeling of spacetime dynamics
Feb 10, 2022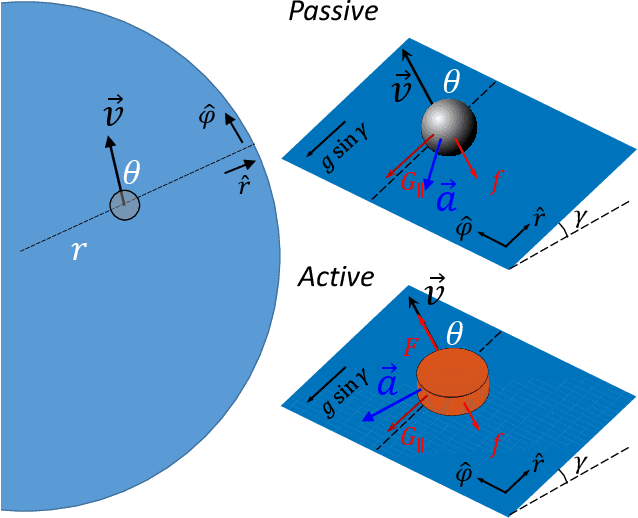
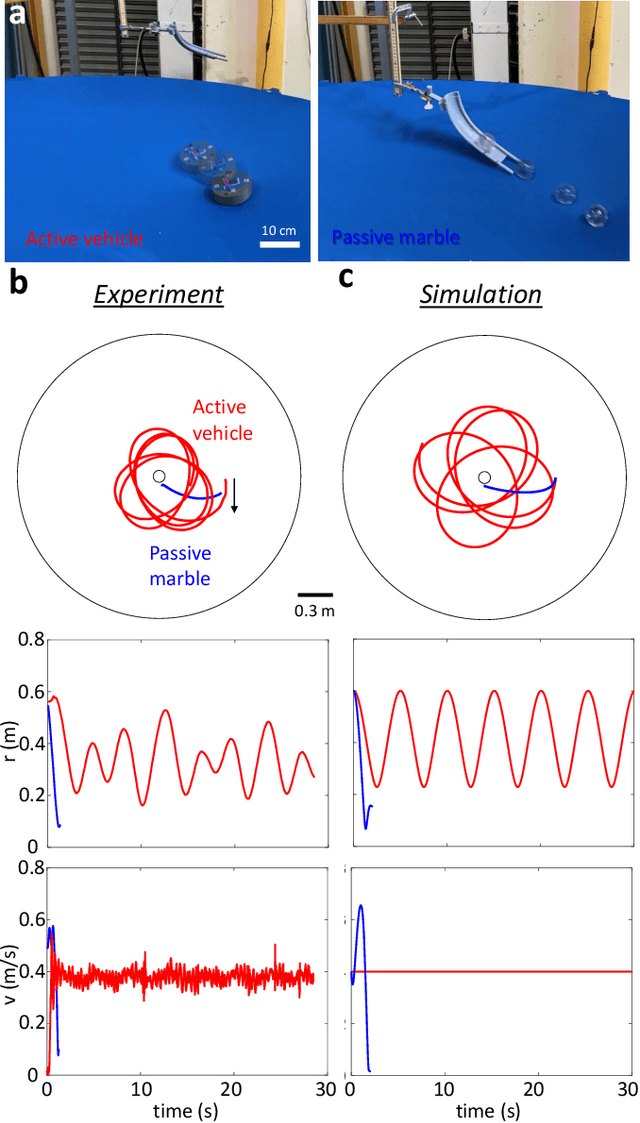
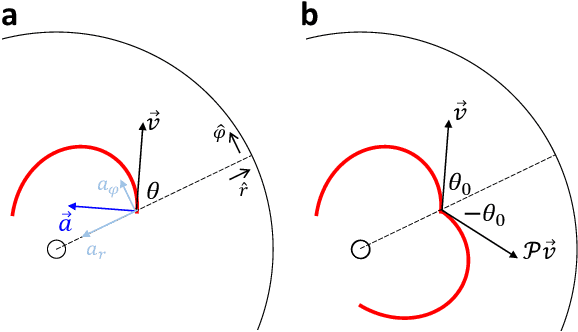

Systems consisting of spheres rolling on elastic membranes have been used as educational tools to introduce a core conceptual idea of General Relativity (GR): how curvature guides the movement of matter. However, previous studies have revealed that such schemes cannot accurately represent relativistic dynamics in the laboratory. Dissipative forces cause the initially GR-like dynamics to be transient and consequently restrict experimental study to only the beginnings of trajectories; dominance of Earth's gravity forbids the difference between spatial and temporal spacetime curvatures. Here by developing a mapping between dynamics of a wheeled vehicle on a spandex membrane, we demonstrate that an active object that can prescribe its speed can not only obtain steady-state orbits, but also use the additional parameters such as speed to tune the orbits towards relativistic dynamics. Our mapping demonstrates how activity mixes space and time in a metric, shows how active particles do not necessarily follow geodesics in the real space but instead follow geodesics in a fiducial spacetime. The mapping further reveals how parameters such as the membrane elasticity and instantaneous speed allow programming a desired spacetime such as the Schwarzschild metric near a non-rotating black hole. Our mapping and framework point the way to the possibility to create a robophysical analog gravity system in the laboratory at low cost and provide insights into active matter in deformable environments and robot exploration in complex landscapes.
Deep Angular Embedding and Feature Correlation Attention for Breast MRI Cancer Analysis
Jun 07, 2019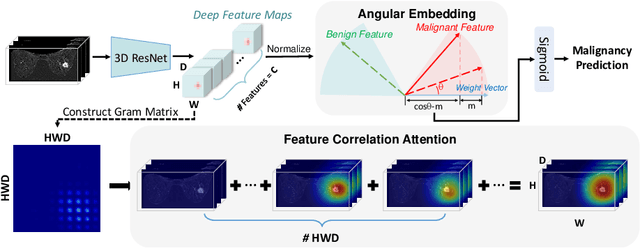
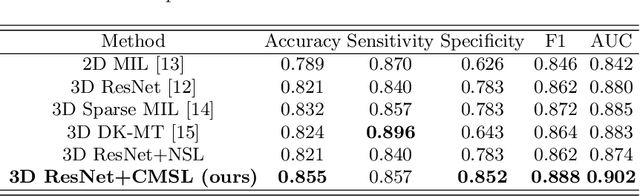
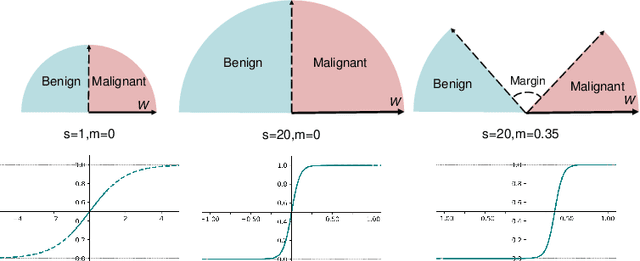
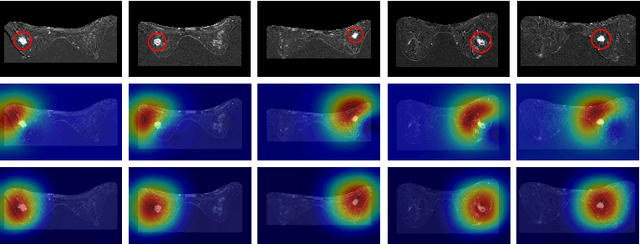
Accurate and automatic analysis of breast MRI plays an important role in early diagnosis and successful treatment planning for breast cancer. Due to the heterogeneity nature, accurate diagnosis of tumors remains a challenging task. In this paper, we propose to identify breast tumor in MRI by Cosine Margin Sigmoid Loss (CMSL) with deep learning (DL) and localize possible cancer lesion by COrrelation Attention Map (COAM) based on the learned features. The CMSL embeds tumor features onto a hypersphere and imposes a decision margin through cosine constraints. In this way, the DL model could learn more separable inter-class features and more compact intra-class features in the angular space. Furthermore, we utilize the correlations among feature vectors to generate attention maps that could accurately localize cancer candidates with only image-level label. We build the largest breast cancer dataset involving 10,290 DCE-MRI scan volumes for developing and evaluating the proposed methods. The model driven by CMSL achieved classification accuracy of 0.855 and AUC of 0.902 on the testing set, with sensitivity and specificity of 0.857 and 0.852, respectively, outperforming other competitive methods overall. In addition, the proposed COAM accomplished more accurate localization of the cancer center compared with other state-of-the-art weakly supervised localization method.