 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThermotropic Vine-inspired Robots
Jan 18, 2023



Soft and bio-inspired robotics promise to imbue robots with capabilities found in the natural world.However, many of these biological capabilities are yet to be realized. For example, current vine- and root-inspired everting robots rely on centralized control outside of the robotic tendril to process sensor information and command actuation. In contrast, roots in nature control growth direction in a distributed manner, with all control, sensing, and actuation local. Such distributed control is useful for robustness and parallelization particularly while the plants search for resources (light, water, favorable soil, etc.). Here we present an approach for exploiting these biological behaviors via a thermotropic vine-inspired robot; the device uses local, material-level sensing, actuation, and control embedded in its skin to grow toward a source of heat. We present basic modeling of the concept, design details, and experimental results showing its behavior in varied heat fields. Our simple device advances vine-inspired everting robots by offering a new, distributed method of shape control, and could lead to eventual applications such as highly parallelized robots for fire-fighting or search-and-rescue operations.
Thermodynamically-informed Air-based Soft Heat Engine Design
Mar 25, 2021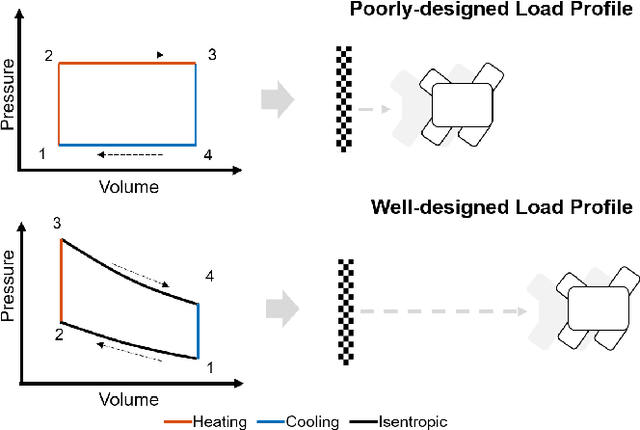
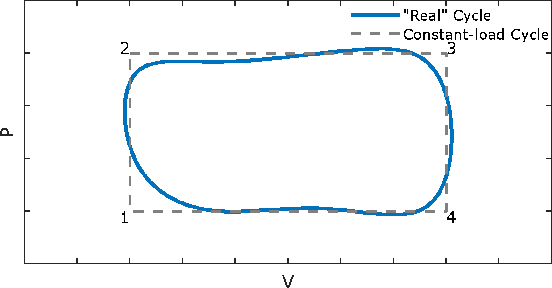
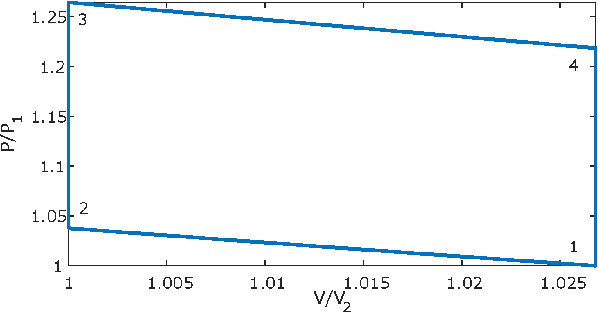
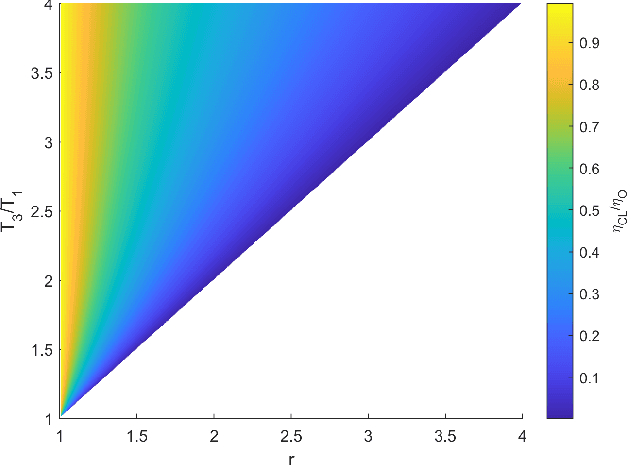
Soft heat engines are poised to play a vital role in future soft robots due to their easy integration into soft structures and low-voltage power requirements. Recent works have demonstrated soft heat engines relying on liquid-to-gas phase change materials. However, despite the fact that many soft robots have air as a primary component, soft air cycles are not a focus of the field. In this paper, we develop theory for air-based soft heat engines design and efficiency, and demonstrate experimentally that efficiency can be improved through careful cycle design. We compare a simple constant-load cycle to a designed decreasing-load cycle, inspired by the Otto cycle. While both efficiencies are relatively low, the Otto-like cycle improves efficiency by a factor of 11.3, demonstrating the promise of this approach. Our results lay the foundation for the development of air-based soft heat engines as a new option for powering soft robots.
Self-propulsion on spandex: toward a robotic analog gravity system
Apr 07, 2020
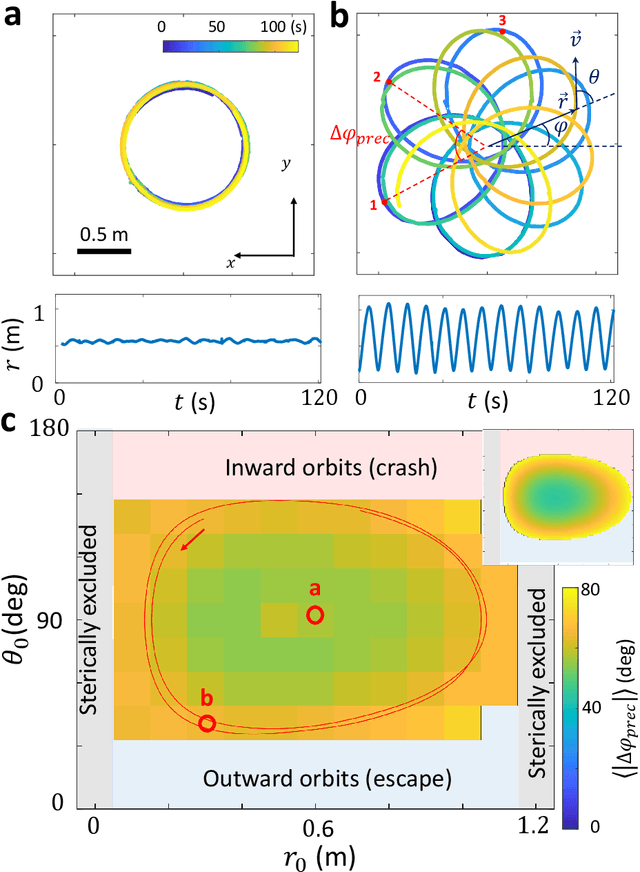
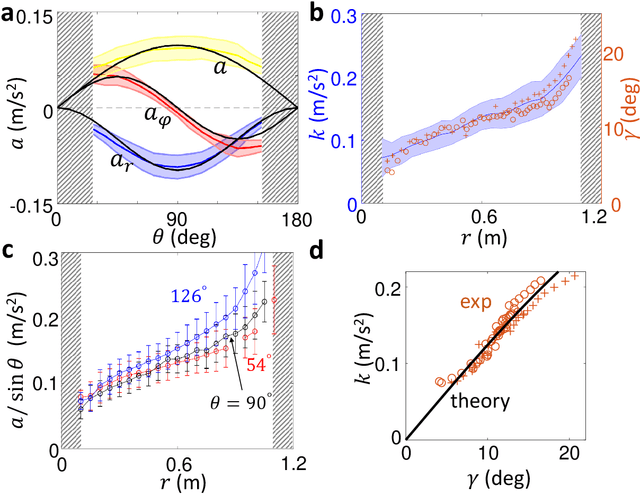
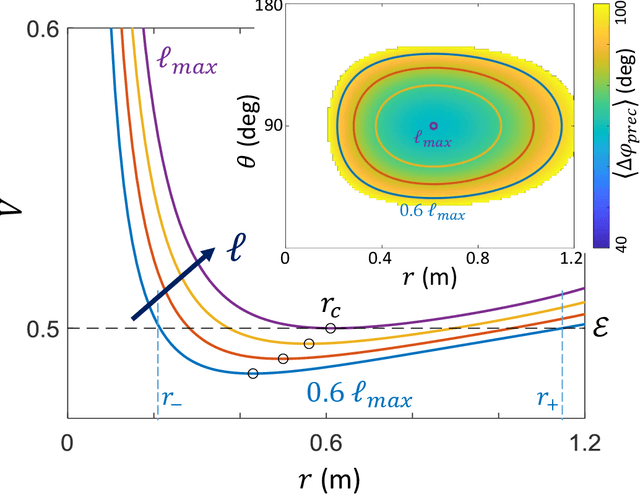
Numerous laboratory systems have been proposed as analogs to study phenomena (like black holes, Hawking radiation) associated with Einstein's theory of General Relativity (GR) but which are challenging to study in experimental or simulated astrophysical settings. Such analogs, typically acoustic, fluid, or atomic systems require delicate manipulation. Here we introduce a robotic system that captures aspects of Einstein-like dynamics in curved spacetime and creates a path toward a mechatronic analog gravity system. The system consists of a wheeled robotic vehicle transiting a deformable elastic membrane. With a fixed central depression in the membrane (mimicking a massive body), the vehicle paths around the depression resemble the dynamics observed near general-relativistic compact objects (e.g. black holes). We recast the vehicle plus membrane dynamics in physical space into geodesic motion of a so-called "test particle" in a fiducial curved space-time. The mapping facilitates understanding of how vehicle characteristics (e.g. mass) can be modified to change precession dynamics. Since an important aspect of GR is the coupling of matter and spacetime (which influence each other) we also study the dynamics of a two-robot system interacting solely via local membrane deformations. For a range of masses, we observe vehicle "attraction"; initially separated robots converge and collide. A control scheme in which a robot senses its local tilt angle and adjusts its speed enables it to escape capture. Our system provides a path towards a readily tunable analog gravity system and can aid design and control of locomoting devices (e.g. water walkers) that couple strongly to their environments.