 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-propulsion on spandex: toward a robotic analog gravity system
Paper and Code
Apr 07, 2020
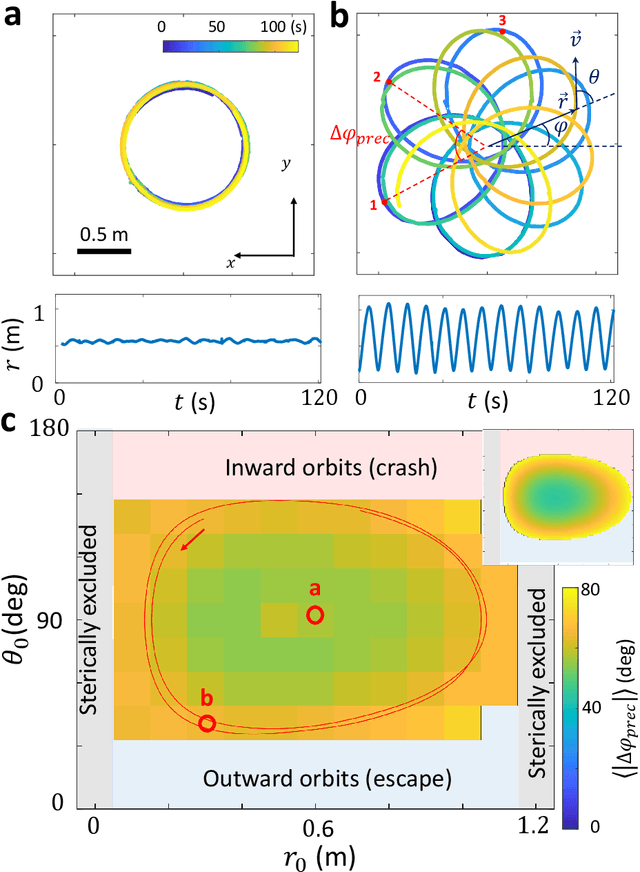
Numerous laboratory systems have been proposed as analogs to study phenomena (like black holes, Hawking radiation) associated with Einstein's theory of General Relativity (GR) but which are challenging to study in experimental or simulated astrophysical settings. Such analogs, typically acoustic, fluid, or atomic systems require delicate manipulation. Here we introduce a robotic system that captures aspects of Einstein-like dynamics in curved spacetime and creates a path toward a mechatronic analog gravity system. The system consists of a wheeled robotic vehicle transiting a deformable elastic membrane. With a fixed central depression in the membrane (mimicking a massive body), the vehicle paths around the depression resemble the dynamics observed near general-relativistic compact objects (e.g. black holes). We recast the vehicle plus membrane dynamics in physical space into geodesic motion of a so-called "test particle" in a fiducial curved space-time. The mapping facilitates understanding of how vehicle characteristics (e.g. mass) can be modified to change precession dynamics. Since an important aspect of GR is the coupling of matter and spacetime (which influence each other) we also study the dynamics of a two-robot system interacting solely via local membrane deformations. For a range of masses, we observe vehicle "attraction"; initially separated robots converge and collide. A control scheme in which a robot senses its local tilt angle and adjusts its speed enables it to escape capture. Our system provides a path towards a readily tunable analog gravity system and can aid design and control of locomoting devices (e.g. water walkers) that couple strongly to their environments.