 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual anemometry of natural vegetation from their leaf motion
Apr 14, 2025High-resolution, near-ground wind-speed data are critical for improving the accuracy of weather predictions and climate models,$^{1-3}$ supporting wildfire control efforts,$^{4-7}$ and ensuring the safe passage of airplanes during takeoff and landing maneouvers.$^{8,9}$ Quantitative wind speed anemometry generally employs on-site instrumentation for accurate single-position data or sophisticated remote techniques such as Doppler radar for quantitative field measurements. It is widely recognized that the wind-induced motion of vegetation depends in a complex manner on their structure and mechanical properties, obviating their use in quantitative anemometry.$^{10-14}$ We analyze measurements on a host of different vegetation showing that leaf motion can be decoupled from the leaf's branch and support structure, at low-to-moderate wind speed, $U_{wind}$. This wind speed range is characterized by a leaf Reynolds number, enabling the development of a remote, quantitative anemometry method based on the formula, $U_{wind}\approx740\sqrt{{\mu}U_{leaf}/{\rho}D}$, that relies only on the leaf size $D$, its measured fluctuating (RMS) speed $U_{leaf}$, the air viscosity $\mu$, and its mass density $\rho$. This formula is corroborated by a first-principles model and validated using a host of laboratory and field tests on diverse vegetation types, ranging from oak, olive, and magnolia trees through to camphor and bullgrass. The findings of this study open the door to a new paradigm in anemometry, using natural vegetation to enable remote and rapid quantitative field measurements at global locations with minimal cost.
AquaMILR+: Design of an untethered limbless robot for complex aquatic terrain navigation
Sep 27, 2024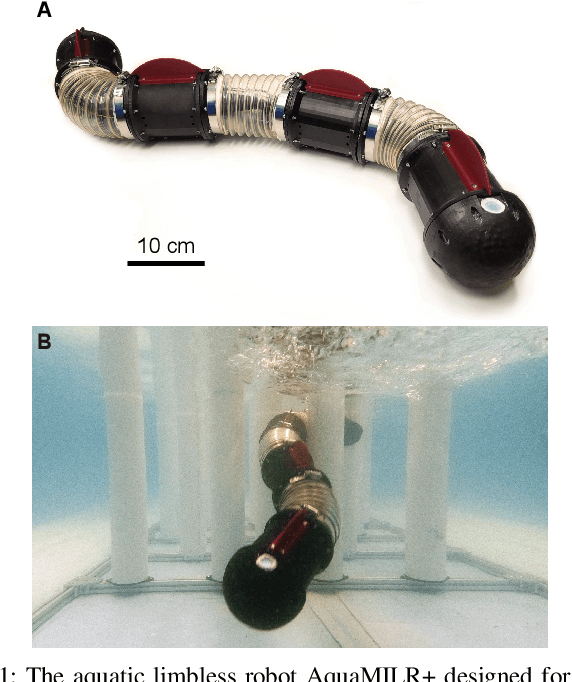
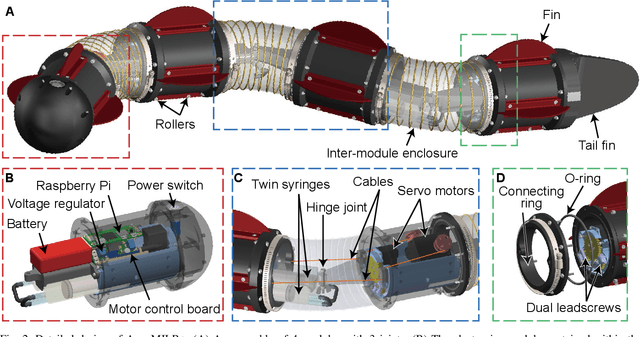

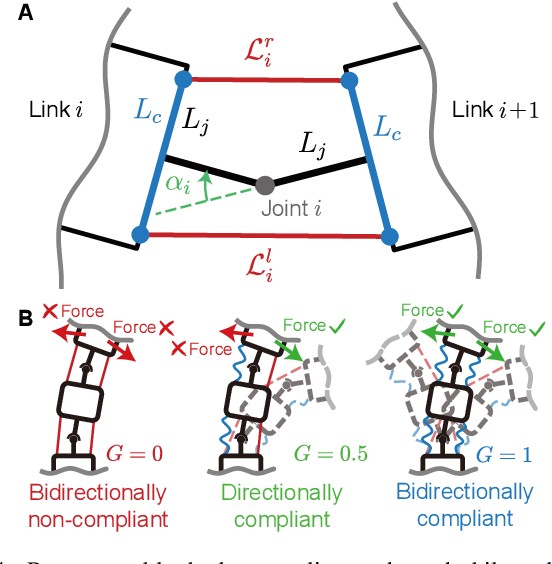
This paper presents AquaMILR+, an untethered limbless robot designed for agile navigation in complex aquatic environments. The robot features a bilateral actuation mechanism that models musculoskeletal actuation in many anguilliform swimming organisms which propagates a moving wave from head to tail allowing open fluid undulatory swimming. This actuation mechanism employs mechanical intelligence, enhancing the robot's maneuverability when interacting with obstacles. AquaMILR+ also includes a compact depth control system inspired by the swim bladder and lung structures of eels and sea snakes. The mechanism, driven by a syringe and telescoping leadscrew, enables depth and pitch control-capabilities that are difficult for most anguilliform swimming robots to achieve. Additional structures, such as fins and a tail, further improve stability and propulsion efficiency. Our tests in both open water and indoor 2D and 3D heterogeneous aquatic environments highlight AquaMILR+'s capabilities and suggest a promising system for complex underwater tasks such as search and rescue and deep-sea exploration.
Fish-inspired tracking of underwater turbulent plumes
Mar 15, 2024Autonomous ocean-exploring vehicles have begun to take advantage of onboard sensor measurements of water properties such as salinity and temperature to locate oceanic features in real time. Such targeted sampling strategies enable more rapid study of ocean environments by actively steering towards areas of high scientific value. Inspired by the ability of aquatic animals to navigate via flow sensing, this work investigates hydrodynamic cues for accomplishing targeted sampling using a palm-sized robotic swimmer. As proof-of-concept analogy for tracking hydrothermal vent plumes in the ocean, the robot is tasked with locating the center of turbulent jet flows in a 13,000-liter water tank using data from onboard pressure sensors. To learn a navigation strategy, we first implemented Reinforcement Learning (RL) on a simulated version of the robot navigating in proximity to turbulent jets. After training, the RL algorithm discovered an effective strategy for locating the jets by following transverse velocity gradients sensed by pressure sensors located on opposite sides of the robot. When implemented on the physical robot, this gradient following strategy enabled the robot to successfully locate the turbulent plumes at more than twice the rate of random searching. Additionally, we found that navigation performance improved as the distance between the pressure sensors increased, which can inform the design of distributed flow sensors in ocean robots. Our results demonstrate the effectiveness and limits of flow-based navigation for autonomously locating hydrodynamic features of interest.
SerialTrack: ScalE and Rotation Invariant Augmented Lagrangian Particle Tracking
Mar 23, 2022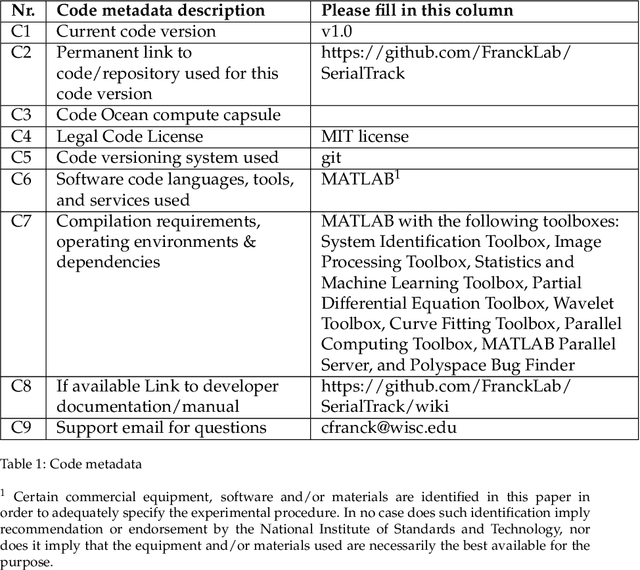
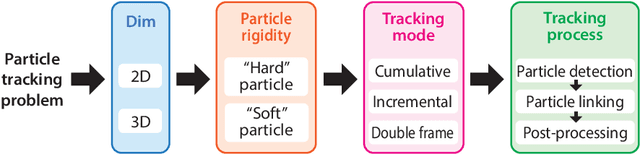
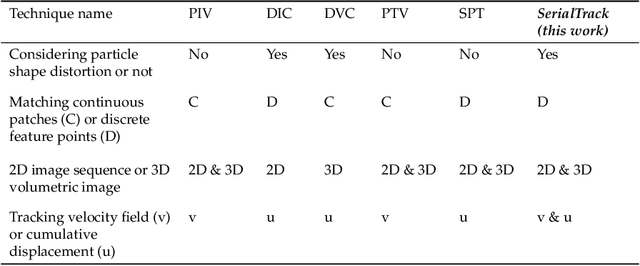
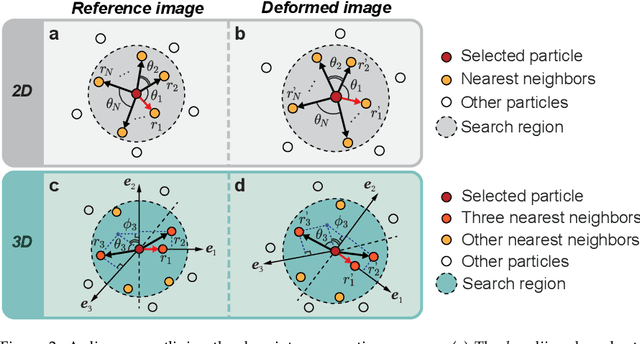
We present a new particle tracking algorithm to accurately resolve large deformation and rotational motion fields, which takes advantage of both local and global particle tracking algorithms. We call this method the ScalE and Rotation Invariant Augmented Lagrangian Particle Tracking (SerialTrack). This method builds an iterative scale and rotation invariant topology-based feature for each particle within a multi-scale tracking algorithm. The global kinematic compatibility condition is applied as a global augmented Lagrangian constraint to enhance the tracking accuracy. An open source software package implementing this numerical approach to track both 2D and 3D, incremental and cumulative deformation fields is provided.
Learning Efficient Navigation in Vortical Flow Fields
Feb 21, 2021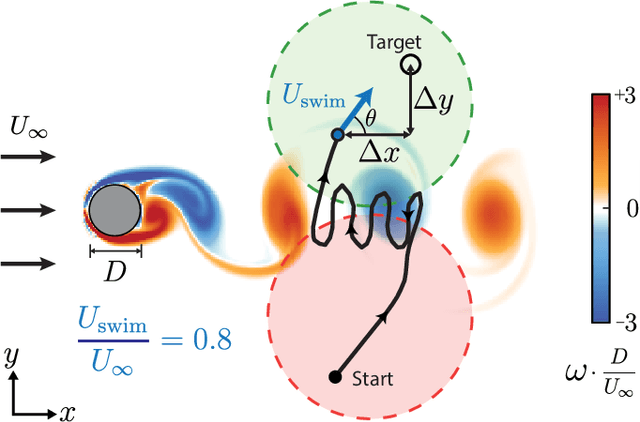
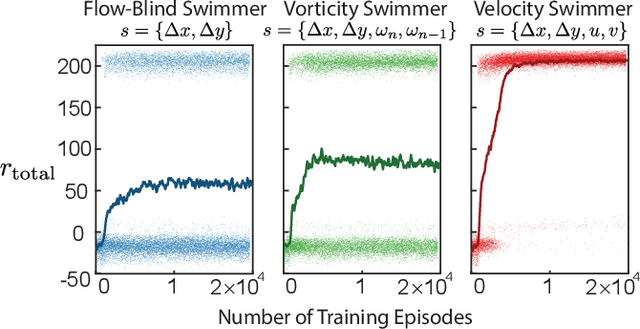

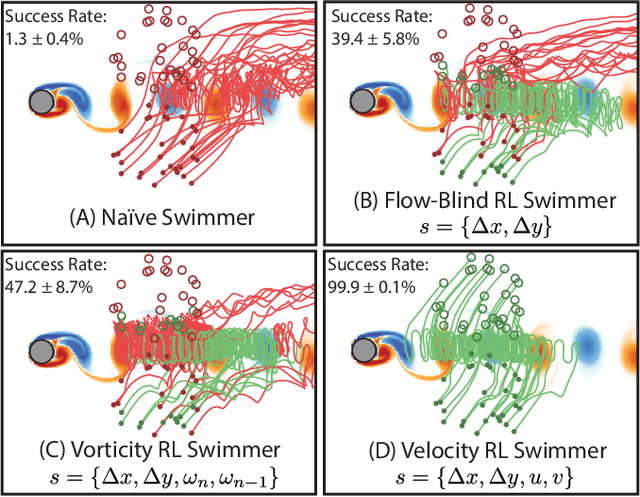
Efficient point-to-point navigation in the presence of a background flow field is important for robotic applications such as ocean surveying. In such applications, robots may only have knowledge of their immediate surroundings or be faced with time-varying currents, which limits the use of optimal control techniques for planning trajectories. Here, we apply a novel Reinforcement Learning algorithm to discover time-efficient navigation policies to steer a fixed-speed swimmer through an unsteady two-dimensional flow field. The algorithm entails inputting environmental cues into a deep neural network that determines the swimmer's actions, and deploying Remember and Forget Experience replay. We find that the resulting swimmers successfully exploit the background flow to reach the target, but that this success depends on the type of sensed environmental cue. Surprisingly, a velocity sensing approach outperformed a bio-mimetic vorticity sensing approach by nearly two-fold in success rate. Equipped with local velocity measurements, the reinforcement learning algorithm achieved near 100% success in reaching the target locations while approaching the time-efficiency of paths found by a global optimal control planner.
Model parameter estimation using coherent structure coloring
Oct 31, 2018

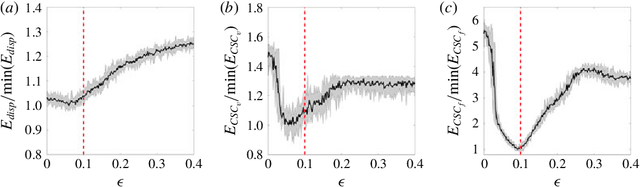
Lagrangian data assimilation is a complex problem in oceanic and atmospheric modeling. Tracking drifters in large-scale geophysical flows can involve uncertainty in drifter location, complex inertial effects, and other factors which make comparing them to simulated Lagrangian trajectories from numerical models extremely challenging. Temporal and spatial discretization, factors necessary in modeling large scale flows, also contribute to separation between real and simulated drifter trajectories. The chaotic advection inherent in these turbulent flows tends to separate even closely spaced tracer particles, making error metrics based solely on drifter displacements unsuitable for estimating model parameters. We propose to instead use error in the coherent structure coloring (CSC) field to assess model skill. The CSC field provides a spatial representation of the underlying coherent patterns in the flow, and we show that it is a more robust metric for assessing model accuracy. Through the use of two test cases, one considering spatial uncertainty in particle initialization, and one examining the influence of stochastic error along a trajectory and temporal discretization, we show that error in the coherent structure coloring field can be used to accurately determine single or multiple simultaneously unknown model parameters, whereas a conventional error metric based on error in drifter displacement fails. Because the CSC field enhances the difference in error between correct and incorrect model parameters, error minima in model parameter sweeps become more distinct. The effectiveness and robustness of this method for single and multi-parameter estimation in analytical flows suggests that Lagrangian data assimilation for real oceanic and atmospheric models would benefit from a similar approach.
Simultaneous Coherent Structure Coloring facilitates interpretable clustering of scientific data by amplifying dissimilarity
Sep 03, 2018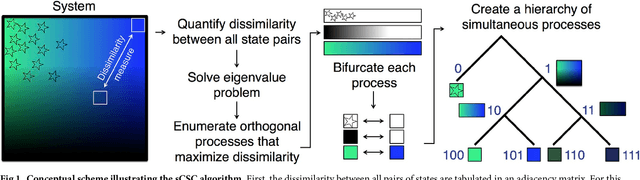
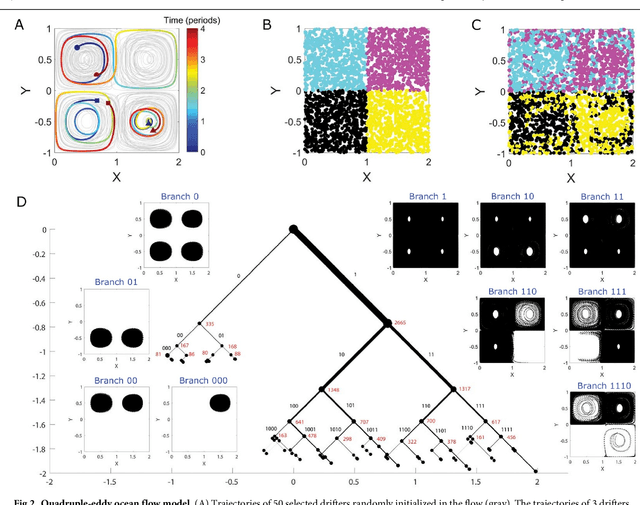
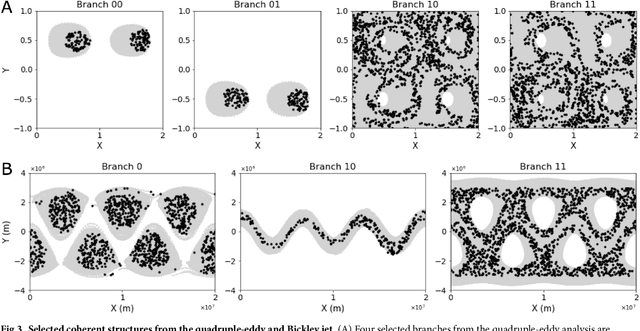
The clustering of data into physically meaningful subsets often requires assumptions regarding the number, size, or shape of the subgroups. Here, we present a new method, simultaneous Coherent Structure Coloring (sCSC), which accomplishes the task of unsupervised clustering without a priori guidance regarding the underlying structure of the data. sCSC performs a sequence of binary splittings on the dataset such that the most dissimilar data points are required to be in separate clusters. To achieve this, we obtain a set of orthogonal coordinates along which dissimilarity in the dataset is maximized from a generalized eigenvalue problem based on the pairwise dissimilarity between the data points to be clustered. This sequence of bifurcations produces a binary tree representation of the system, from which the number of clusters in the data and their interrelationships naturally emerge. To illustrate the effectiveness of the method in the absence of a priori assumptions we apply it to two exemplary problems in fluid dynamics. Then, we illustrate its capacity for interpretability using a high-dimensional protein folding simulation dataset. While we restrict our examples to dynamical physical systems in this work, we anticipate straightforward translation to other fields where existing analysis tools require ad hoc assumptions on the data structure, lack the interpretability of the present method, or in which the underlying processes are less accessible, such as genomics and neuroscience.
Identification of individual coherent sets associated with flow trajectories using Coherent Structure Coloring
Aug 18, 2017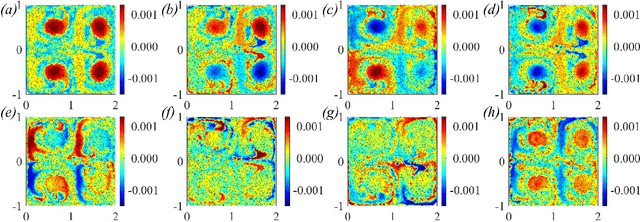
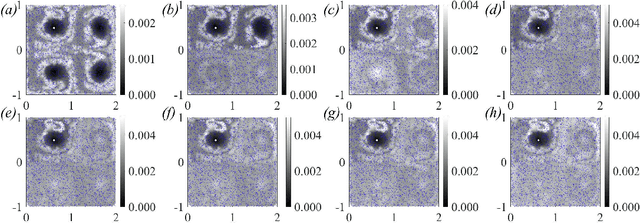
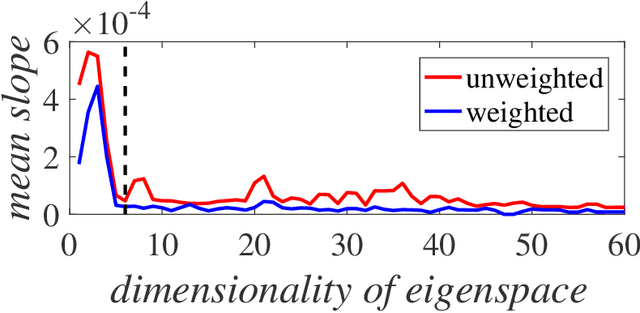
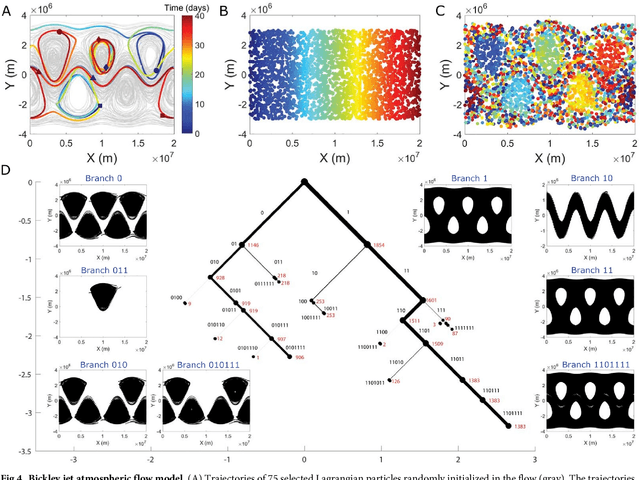
We present a method for identifying the coherent structures associated with individual Lagrangian flow trajectories even where only sparse particle trajectory data is available. The method, based on techniques in spectral graph theory, uses the Coherent Structure Coloring vector and associated eigenvectors to analyze the distance in higher-dimensional eigenspace between a selected reference trajectory and other tracer trajectories in the flow. By analyzing this distance metric in a hierarchical clustering, the coherent structure of which the reference particle is a member can be identified. This algorithm is proven successful in identifying coherent structures of varying complexities in canonical unsteady flows. Additionally, the method is able to assess the relative coherence of the associated structure in comparison to the surrounding flow. Although the method is demonstrated here in the context of fluid flow kinematics, the generality of the approach allows for its potential application to other unsupervised clustering problems in dynamical systems such as neuronal activity, gene expression, or social networks.
Coherent structure coloring: identification of coherent structures from sparse data using graph theory
Nov 07, 2016

We present a frame-invariant method for detecting coherent structures from Lagrangian flow trajectories that can be sparse in number, as is the case in many fluid mechanics applications of practical interest. The method, based on principles used in graph coloring and spectral graph drawing algorithms, examines a measure of the kinematic dissimilarity of all pairs of fluid trajectories, either measured experimentally, e.g. using particle tracking velocimetry; or numerically, by advecting fluid particles in the Eulerian velocity field. Coherence is assigned to groups of particles whose kinematics remain similar throughout the time interval for which trajectory data is available, regardless of their physical proximity to one another. Through the use of several analytical and experimental validation cases, this algorithm is shown to robustly detect coherent structures using significantly less flow data than is required by existing spectral graph theory methods.