 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAquaMILR+: Design of an untethered limbless robot for complex aquatic terrain navigation
Sep 27, 2024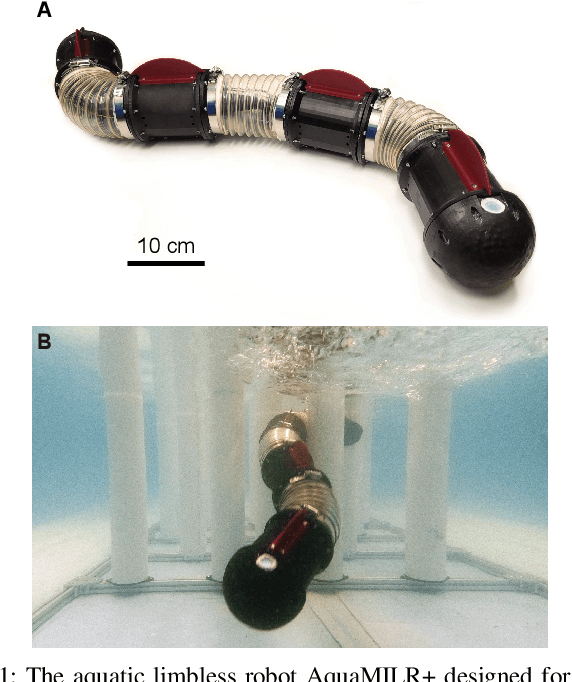
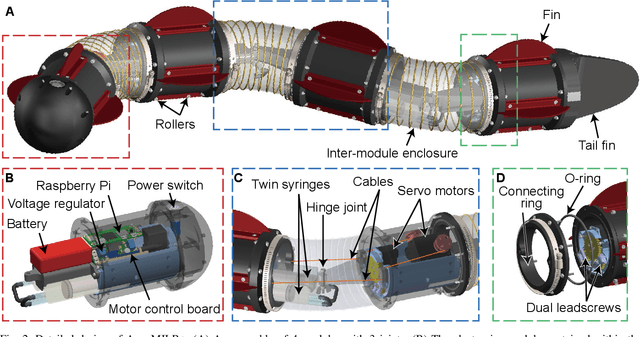

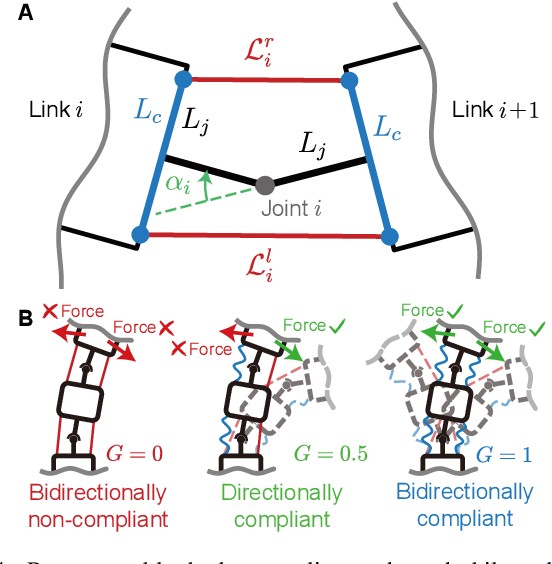
This paper presents AquaMILR+, an untethered limbless robot designed for agile navigation in complex aquatic environments. The robot features a bilateral actuation mechanism that models musculoskeletal actuation in many anguilliform swimming organisms which propagates a moving wave from head to tail allowing open fluid undulatory swimming. This actuation mechanism employs mechanical intelligence, enhancing the robot's maneuverability when interacting with obstacles. AquaMILR+ also includes a compact depth control system inspired by the swim bladder and lung structures of eels and sea snakes. The mechanism, driven by a syringe and telescoping leadscrew, enables depth and pitch control-capabilities that are difficult for most anguilliform swimming robots to achieve. Additional structures, such as fins and a tail, further improve stability and propulsion efficiency. Our tests in both open water and indoor 2D and 3D heterogeneous aquatic environments highlight AquaMILR+'s capabilities and suggest a promising system for complex underwater tasks such as search and rescue and deep-sea exploration.
Fish-inspired tracking of underwater turbulent plumes
Mar 15, 2024Autonomous ocean-exploring vehicles have begun to take advantage of onboard sensor measurements of water properties such as salinity and temperature to locate oceanic features in real time. Such targeted sampling strategies enable more rapid study of ocean environments by actively steering towards areas of high scientific value. Inspired by the ability of aquatic animals to navigate via flow sensing, this work investigates hydrodynamic cues for accomplishing targeted sampling using a palm-sized robotic swimmer. As proof-of-concept analogy for tracking hydrothermal vent plumes in the ocean, the robot is tasked with locating the center of turbulent jet flows in a 13,000-liter water tank using data from onboard pressure sensors. To learn a navigation strategy, we first implemented Reinforcement Learning (RL) on a simulated version of the robot navigating in proximity to turbulent jets. After training, the RL algorithm discovered an effective strategy for locating the jets by following transverse velocity gradients sensed by pressure sensors located on opposite sides of the robot. When implemented on the physical robot, this gradient following strategy enabled the robot to successfully locate the turbulent plumes at more than twice the rate of random searching. Additionally, we found that navigation performance improved as the distance between the pressure sensors increased, which can inform the design of distributed flow sensors in ocean robots. Our results demonstrate the effectiveness and limits of flow-based navigation for autonomously locating hydrodynamic features of interest.
Learning Efficient Navigation in Vortical Flow Fields
Feb 21, 2021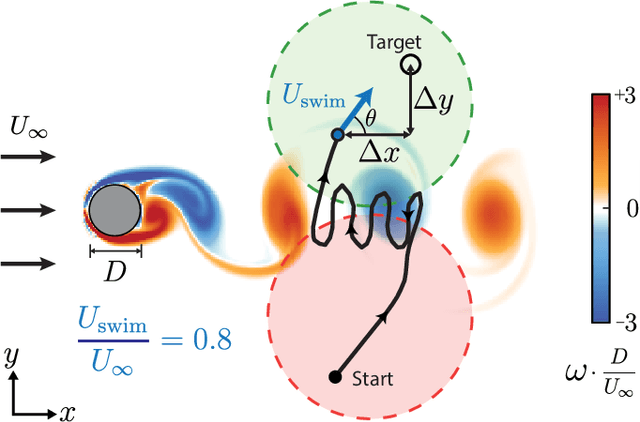
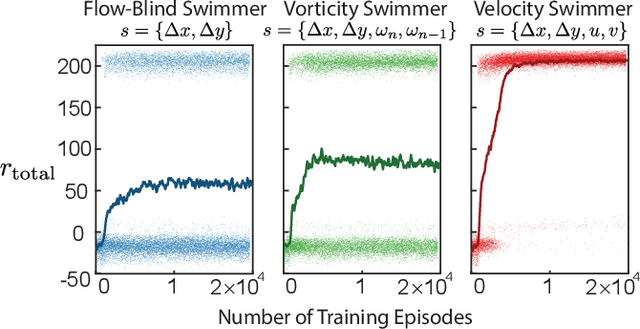

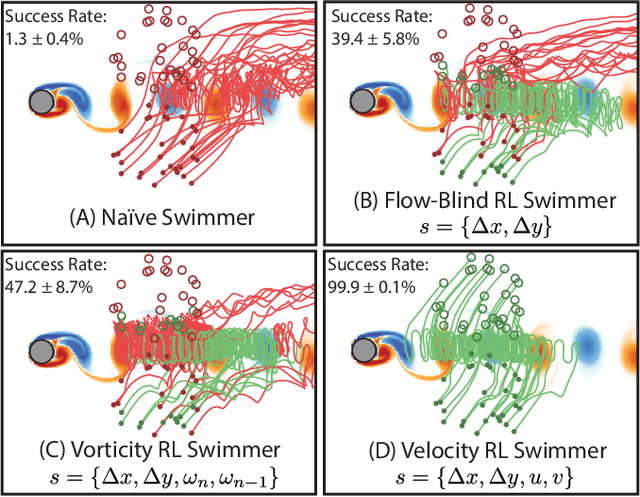
Efficient point-to-point navigation in the presence of a background flow field is important for robotic applications such as ocean surveying. In such applications, robots may only have knowledge of their immediate surroundings or be faced with time-varying currents, which limits the use of optimal control techniques for planning trajectories. Here, we apply a novel Reinforcement Learning algorithm to discover time-efficient navigation policies to steer a fixed-speed swimmer through an unsteady two-dimensional flow field. The algorithm entails inputting environmental cues into a deep neural network that determines the swimmer's actions, and deploying Remember and Forget Experience replay. We find that the resulting swimmers successfully exploit the background flow to reach the target, but that this success depends on the type of sensed environmental cue. Surprisingly, a velocity sensing approach outperformed a bio-mimetic vorticity sensing approach by nearly two-fold in success rate. Equipped with local velocity measurements, the reinforcement learning algorithm achieved near 100% success in reaching the target locations while approaching the time-efficiency of paths found by a global optimal control planner.