 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThree-dimensional hydro-cluttered locomotion by an undulatory robot
Jun 05, 2026Aquatic robots have expanded human access to underwater environments, yet many underwater spaces contain obstacles that can disrupt open-water locomotion. In "hydro-cluttered" environments, water is interspersed with rigid and flexible clutter, making body-obstacle contact unavoidable. Operating in these spaces requires robots that can regulate and exploit contact, but this regime remains difficult to model or simulate. Building on recent advances in mechanical intelligence in terradynamically capable limbless robotics, we develop principles for 3D aquatic locomotion using AquaMILR, an elongate limbless robot that combines bilateral cable-driven actuation, programmable body compliance, distributed depth regulation, corrosion-resistant enclosures, and onboard power and electronics for untethered field operation. Systematic robophysical experiments reveal that programmable body compliance regulates body deformation and converts body-environment interactions into fast, robust, forward progression across increasing hydro-clutter constraint strength. Depth regulation provides three-dimensional access, allowing the robot to bypass clutter, recover from obstruction, and continue through otherwise inaccessible routes. In potential jamming scenarios, emergent inertia-induced rolling acts as a spontaneous recovery mechanism, freeing the robot from clutter that would otherwise lead to failure and allowing locomotion to continue without additional control. Tests of the robot in an aquatic mangrove field demonstrate that these principles transfer to practical operation, enabling navigation and onboard visual inspection of inaccessible root zones. These results establish principles for hydro-cluttered locomotion and a design paradigm in which aquatic robots exploit environmental complexity as a locomotor resource.
AquaMILR+: Design of an untethered limbless robot for complex aquatic terrain navigation
Sep 27, 2024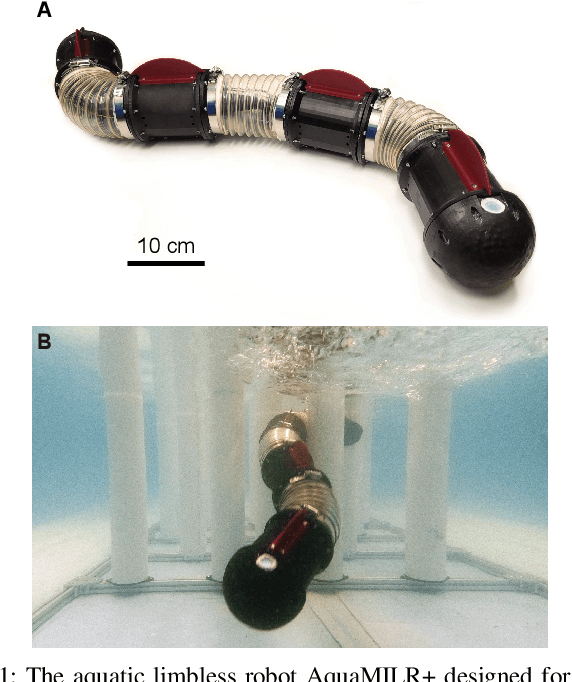
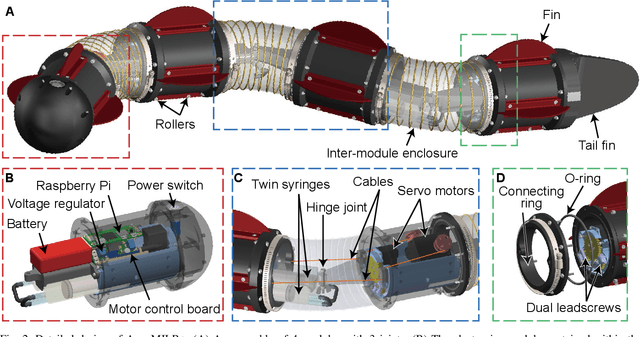

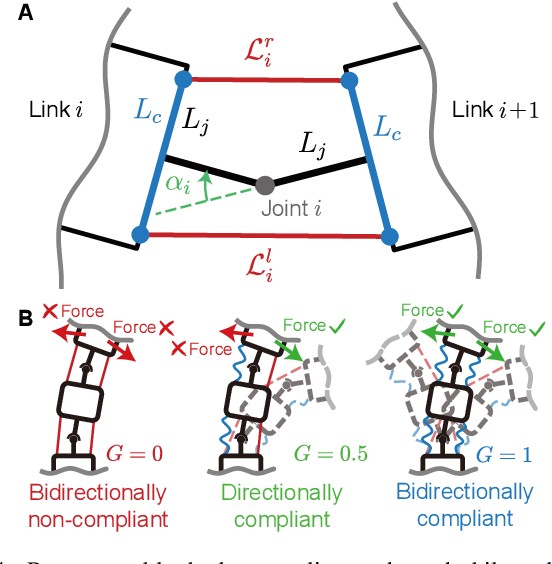
This paper presents AquaMILR+, an untethered limbless robot designed for agile navigation in complex aquatic environments. The robot features a bilateral actuation mechanism that models musculoskeletal actuation in many anguilliform swimming organisms which propagates a moving wave from head to tail allowing open fluid undulatory swimming. This actuation mechanism employs mechanical intelligence, enhancing the robot's maneuverability when interacting with obstacles. AquaMILR+ also includes a compact depth control system inspired by the swim bladder and lung structures of eels and sea snakes. The mechanism, driven by a syringe and telescoping leadscrew, enables depth and pitch control-capabilities that are difficult for most anguilliform swimming robots to achieve. Additional structures, such as fins and a tail, further improve stability and propulsion efficiency. Our tests in both open water and indoor 2D and 3D heterogeneous aquatic environments highlight AquaMILR+'s capabilities and suggest a promising system for complex underwater tasks such as search and rescue and deep-sea exploration.