 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThree-dimensional hydro-cluttered locomotion by an undulatory robot
Jun 05, 2026Aquatic robots have expanded human access to underwater environments, yet many underwater spaces contain obstacles that can disrupt open-water locomotion. In "hydro-cluttered" environments, water is interspersed with rigid and flexible clutter, making body-obstacle contact unavoidable. Operating in these spaces requires robots that can regulate and exploit contact, but this regime remains difficult to model or simulate. Building on recent advances in mechanical intelligence in terradynamically capable limbless robotics, we develop principles for 3D aquatic locomotion using AquaMILR, an elongate limbless robot that combines bilateral cable-driven actuation, programmable body compliance, distributed depth regulation, corrosion-resistant enclosures, and onboard power and electronics for untethered field operation. Systematic robophysical experiments reveal that programmable body compliance regulates body deformation and converts body-environment interactions into fast, robust, forward progression across increasing hydro-clutter constraint strength. Depth regulation provides three-dimensional access, allowing the robot to bypass clutter, recover from obstruction, and continue through otherwise inaccessible routes. In potential jamming scenarios, emergent inertia-induced rolling acts as a spontaneous recovery mechanism, freeing the robot from clutter that would otherwise lead to failure and allowing locomotion to continue without additional control. Tests of the robot in an aquatic mangrove field demonstrate that these principles transfer to practical operation, enabling navigation and onboard visual inspection of inaccessible root zones. These results establish principles for hydro-cluttered locomotion and a design paradigm in which aquatic robots exploit environmental complexity as a locomotor resource.
WALT: Web Agents that Learn Tools
Oct 01, 2025Web agents promise to automate complex browser tasks, but current methods remain brittle -- relying on step-by-step UI interactions and heavy LLM reasoning that break under dynamic layouts and long horizons. Humans, by contrast, exploit website-provided functionality through high-level operations like search, filter, and sort. We introduce WALT (Web Agents that Learn Tools), a framework that reverse-engineers latent website functionality into reusable invocable tools. Rather than hypothesizing ad-hoc skills, WALT exposes robust implementations of automations already designed into websites -- spanning discovery (search, filter, sort), communication (post, comment, upvote), and content management (create, edit, delete). Tools abstract away low-level execution: instead of reasoning about how to click and type, agents simply call search(query) or create(listing). This shifts the computational burden from fragile step-by-step reasoning to reliable tool invocation. On VisualWebArena and WebArena, WALT achieves higher success with fewer steps and less LLM-dependent reasoning, establishing a robust and generalizable paradigm for browser automation.
SCUBA: Salesforce Computer Use Benchmark
Sep 30, 2025


We introduce SCUBA, a benchmark designed to evaluate computer-use agents on customer relationship management (CRM) workflows within the Salesforce platform. SCUBA contains 300 task instances derived from real user interviews, spanning three primary personas, platform administrators, sales representatives, and service agents. The tasks test a range of enterprise-critical abilities, including Enterprise Software UI navigation, data manipulation, workflow automation, information retrieval, and troubleshooting. To ensure realism, SCUBA operates in Salesforce sandbox environments with support for parallel execution and fine-grained evaluation metrics to capture milestone progress. We benchmark a diverse set of agents under both zero-shot and demonstration-augmented settings. We observed huge performance gaps in different agent design paradigms and gaps between the open-source model and the closed-source model. In the zero-shot setting, open-source model powered computer-use agents that have strong performance on related benchmarks like OSWorld only have less than 5\% success rate on SCUBA, while methods built on closed-source models can still have up to 39% task success rate. In the demonstration-augmented settings, task success rates can be improved to 50\% while simultaneously reducing time and costs by 13% and 16%, respectively. These findings highlight both the challenges of enterprise tasks automation and the promise of agentic solutions. By offering a realistic benchmark with interpretable evaluation, SCUBA aims to accelerate progress in building reliable computer-use agents for complex business software ecosystems.
AquaMILR+: Design of an untethered limbless robot for complex aquatic terrain navigation
Sep 27, 2024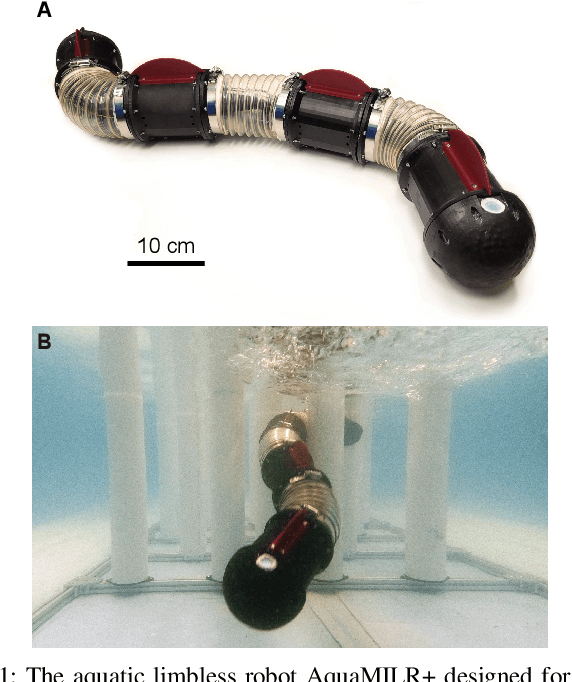
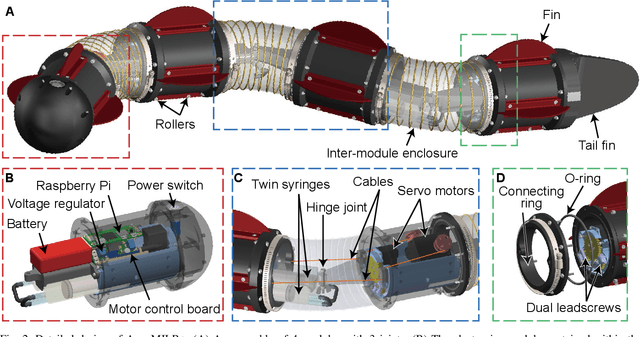

This paper presents AquaMILR+, an untethered limbless robot designed for agile navigation in complex aquatic environments. The robot features a bilateral actuation mechanism that models musculoskeletal actuation in many anguilliform swimming organisms which propagates a moving wave from head to tail allowing open fluid undulatory swimming. This actuation mechanism employs mechanical intelligence, enhancing the robot's maneuverability when interacting with obstacles. AquaMILR+ also includes a compact depth control system inspired by the swim bladder and lung structures of eels and sea snakes. The mechanism, driven by a syringe and telescoping leadscrew, enables depth and pitch control-capabilities that are difficult for most anguilliform swimming robots to achieve. Additional structures, such as fins and a tail, further improve stability and propulsion efficiency. Our tests in both open water and indoor 2D and 3D heterogeneous aquatic environments highlight AquaMILR+'s capabilities and suggest a promising system for complex underwater tasks such as search and rescue and deep-sea exploration.
AquaMILR: Mechanical intelligence simplifies control of undulatory robots in cluttered fluid environments
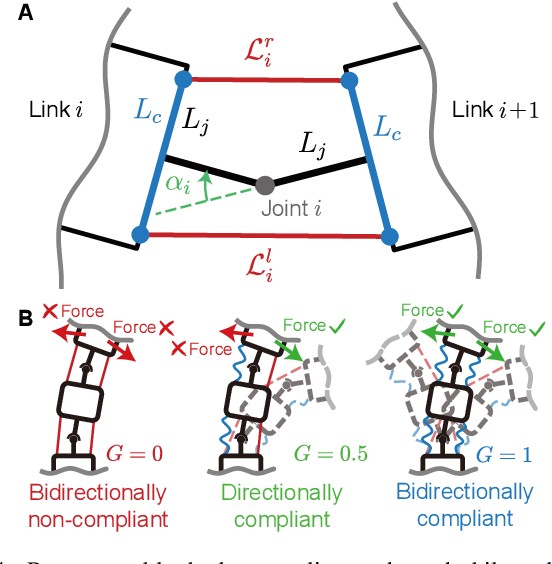
Jul 01, 2024While undulatory swimming of elongate limbless robots has been extensively studied in open hydrodynamic environments, less research has been focused on limbless locomotion in complex, cluttered aquatic environments. Motivated by the concept of mechanical intelligence, where controls for obstacle navigation can be offloaded to passive body mechanics in terrestrial limbless locomotion, we hypothesize that principles of mechanical intelligence can be extended to cluttered hydrodynamic regimes. To test this, we developed an untethered limbless robot capable of undulatory swimming on water surfaces, utilizing a bilateral cable-driven mechanism inspired by organismal muscle actuation morphology to achieve programmable anisotropic body compliance. We demonstrated through robophysical experiments that, similar to terrestrial locomotion, an appropriate level of body compliance can facilitate emergent swim through complex hydrodynamic environments under pure open-loop control. Moreover, we found that swimming performance depends on undulation frequency, with effective locomotion achieved only within a specific frequency range. This contrasts with highly damped terrestrial regimes, where inertial effects can often be neglected. Further, to enhance performance and address the challenges posed by nondeterministic obstacle distributions, we incorporated computational intelligence by developing a real-time body compliance tuning controller based on cable tension feedback. This controller improves the robot's robustness and overall speed in heterogeneous hydrodynamic environments.
Anisotropic body compliance facilitates robotic sidewinding in complex environments
Sep 24, 2023Sidewinding, a locomotion strategy characterized by the coordination of lateral and vertical body undulations, is frequently observed in rattlesnakes and has been successfully reconstructed by limbless robotic systems for effective movement across diverse terrestrial terrains. However, the integration of compliant mechanisms into sidewinding limbless robots remains less explored, posing challenges for navigation in complex, rheologically diverse environments. Inspired by a notable control simplification via mechanical intelligence in lateral undulation, which offloads feedback control to passive body mechanics and interactions with the environment, we present an innovative design of a mechanically intelligent limbless robot for sidewinding. This robot features a decentralized bilateral cable actuation system that resembles organismal muscle actuation mechanisms. We develop a feedforward controller that incorporates programmable body compliance into the sidewinding gait template. Our experimental results highlight the emergence of mechanical intelligence when the robot is equipped with an appropriate level of body compliance. This allows the robot to 1) locomote more energetically efficiently, as evidenced by a reduced cost of transport, and 2) navigate through terrain heterogeneities, all achieved in an open-loop manner, without the need for environmental awareness.
Salesforce CausalAI Library: A Fast and Scalable Framework for Causal Analysis of Time Series and Tabular Data
Jan 25, 2023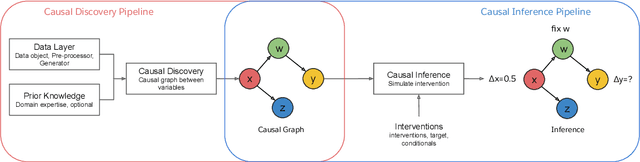

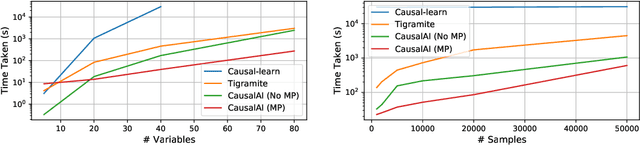
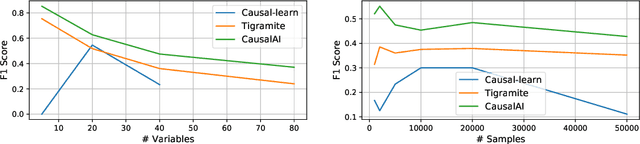
We introduce the Salesforce CausalAI Library, an open-source library for causal analysis using observational data. It supports causal discovery and causal inference for tabular and time series data, of both discrete and continuous types. This library includes algorithms that handle linear and non-linear causal relationships between variables, and uses multi-processing for speed-up. We also include a data generator capable of generating synthetic data with specified structural equation model for both the aforementioned data formats and types, that helps users control the ground-truth causal process while investigating various algorithms. Finally, we provide a user interface (UI) that allows users to perform causal analysis on data without coding. The goal of this library is to provide a fast and flexible solution for a variety of problems in the domain of causality. This technical report describes the Salesforce CausalAI API along with its capabilities, the implementations of the supported algorithms, and experiments demonstrating their performance and speed. Our library is available at \url{https://github.com/salesforce/causalai}.