 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTerradynamics and design of tip-extending robotic anchors
Nov 14, 2025Most engineered pilings require substantially more force to be driven into the ground than they can resist during extraction. This requires relatively heavy equipment for insertion, which is problematic for anchoring in hard-to-access sites, including in extraterrestrial locations. In contrast, for tree roots, the external reaction force required to extract is much greater than required to insert--little more than the weight of the seed initiates insertion. This is partly due to the mechanism by which roots insert into the ground: tip extension. Proof-of-concept robotic prototypes have shown the benefits of using this mechanism, but a rigorous understanding of the underlying granular mechanics and how they inform the design of a robotic anchor is lacking. Here, we study the terradynamics of tip-extending anchors compared to traditional piling-like intruders, develop a set of design insights, and apply these to create a deployable robotic anchor. Specifically, we identify that to increase an anchor's ratio of extraction force to insertion force, it should: (i) extend beyond a critical depth; (ii) include hair-like protrusions; (iii) extend near-vertically, and (iv) incorporate multiple smaller anchors rather than a single large anchor. Synthesizing these insights, we developed a lightweight, soft robotic, root-inspired anchoring device that inserts into the ground with a reaction force less than its weight. We demonstrate that the 300 g device can deploy a series of temperature sensors 45 cm deep into loose Martian regolith simulant while anchoring with an average of 120 N, resulting in an anchoring-to-weight ratio of 40:1.
High-curvature, high-force, vine robot for inspection
Oct 02, 2023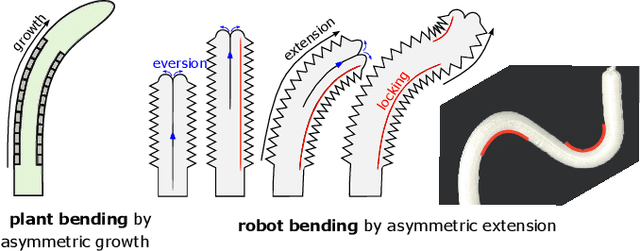
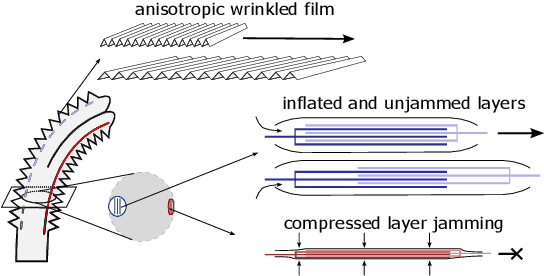
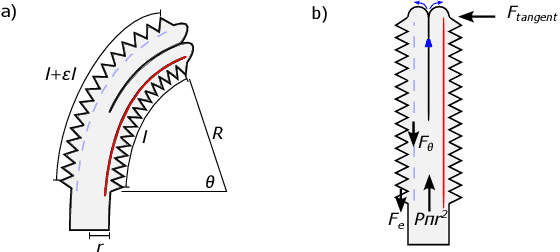
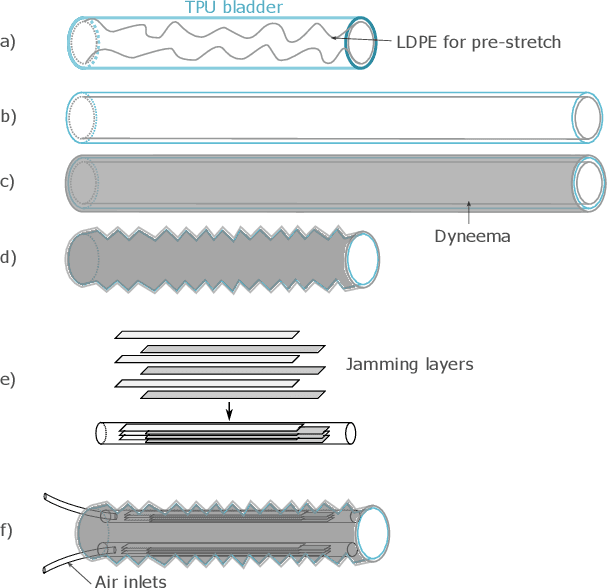
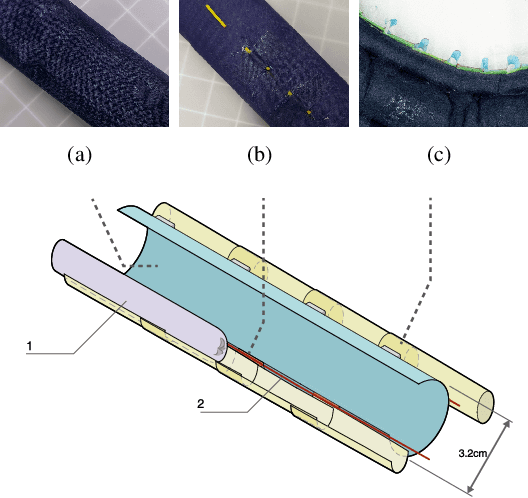
Robot performance has advanced considerably both in and out of the factory, however in tightly constrained, unknown environments such as inside a jet engine or the human heart, current robots are less adept. In such cases where a borescope or endoscope can't reach, disassembly or surgery are costly. One promising inspection device inspired by plant growth are "vine robots" that can navigate cluttered environments by extending from their tip. Yet, these vine robots are currently limited in their ability to simultaneously steer into tight curvatures and apply substantial forces to the environment. Here, we propose a plant-inspired method of steering by asymmetrically lengthening one side of the vine robot to enable high curvature and large force application. Our key development is the introduction of an extremely anisotropic, composite, wrinkled film with elastic moduli 400x different in orthogonal directions. The film is used as the vine robot body, oriented such that it can stretch over 120% axially, but only 3% circumferentially. With the addition of controlled layer jamming, this film enables a steering method inspired by plants in which the circumference of the robot is inextensible, but the sides can stretch to allow turns. This steering method and body pressure do not work against each other, allowing the robot to exhibit higher forces and tighter curvatures than previous vine robot architectures. This work advances the abilities of vine robots--and robots more generally--to not only access tightly constrained environments, but perform useful work once accessed.
A Dexterous Tip-extending Robot with Variable-length Shape-locking
Mar 20, 2020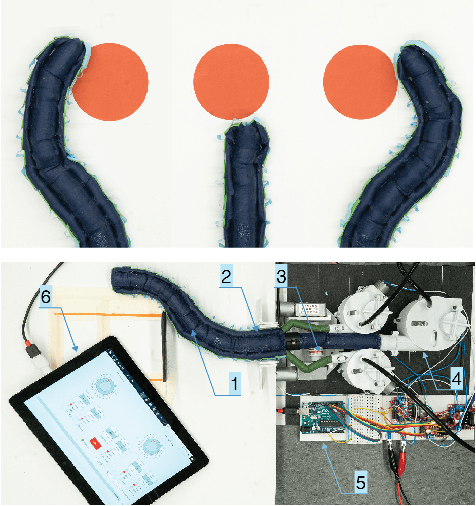
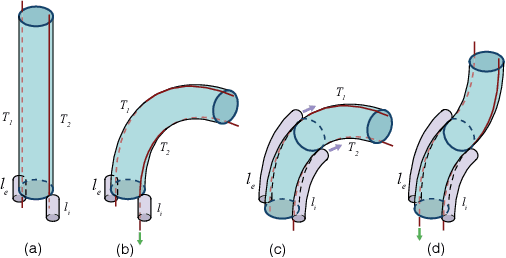
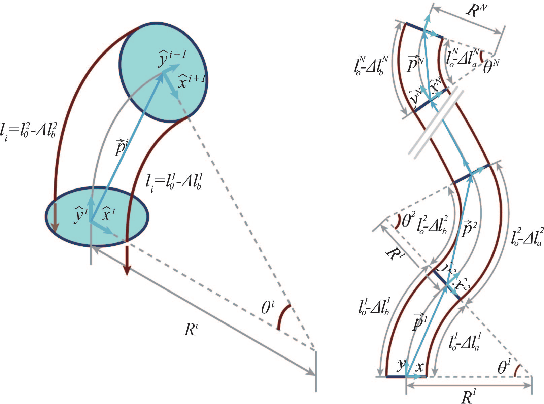
Soft, tip-extending "vine" robots offer a unique mode of inspection and manipulation in highly constrained environments. For practicality, it is desirable that the distal end of the robot can be manipulated freely, while the body remains stationary. However, in previous vine robots, either the shape of the body was fixed after growth with no ability to manipulate the distal end, or the whole body moved together with the tip. Here, we present a concept for shape-locking that enables a vine robot to move only its distal tip, while the body is locked in place. This is achieved using two inextensible, pressurized, tip-extending, chambers that "grow" along the sides of the robot body, preserving curvature in the section where they have been deployed. The length of the locked and free sections can be varied by controlling the extension and retraction of these chambers. We present models describing this shape-locking mechanism and workspace of the robot in both free and constrained environments. We experimentally validate these models, showing an increased dexterous workspace compared to previous vine robots. Our shape-locking concept allows improved performance for vine robots, advancing the field of soft robotics for inspection and manipulation in highly constrained environments.
Vine Robots: Design, Teleoperation, and Deployment for Navigation and Exploration
Feb 28, 2019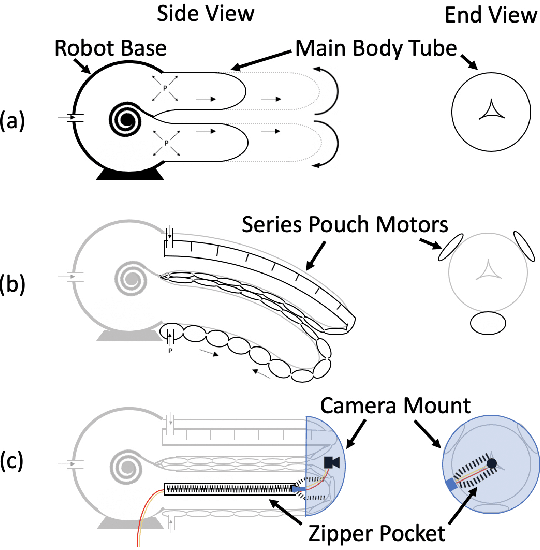
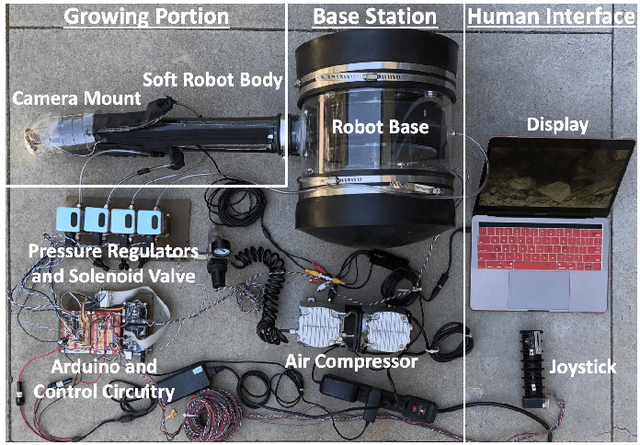
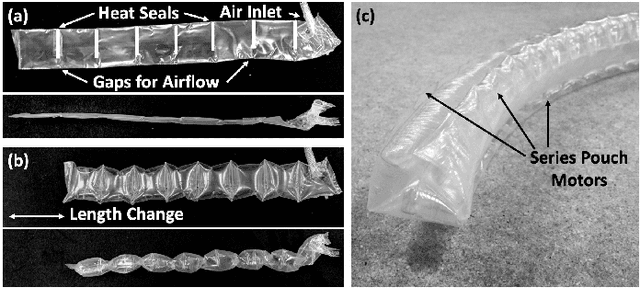
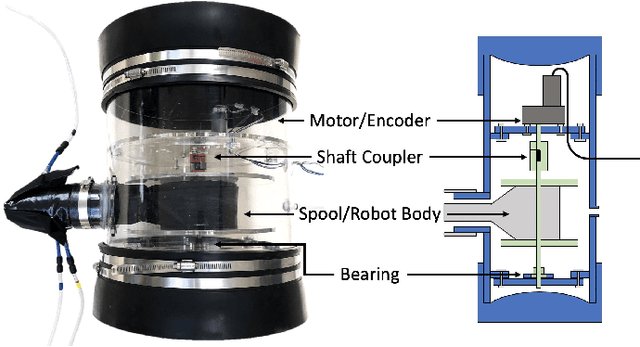
A new class of robots has recently been explored, characterized by tip extension, significant length change, and directional control. Here, we call this class of robots "vine robots," due to their similar behavior to plants with the growth habit of trailing. Due to their growth-based movement, vine robots are well suited for navigation and exploration in cluttered environments, but until now, they have not been deployed outside the lab. Portability of these robots and steerability at length scales relevant for navigation are key to field applications. In addition, intuitive human-in-the-loop teleoperation enables movement in unknown and dynamic environments. We present a vine robot system that is teleoperated using a custom designed flexible joystick and camera system, long enough for use in navigation tasks, and portable for use in the field. We report on deployment of this system in two scenarios: a soft robot navigation competition and exploration of an archaeological site. The competition course required movement over uneven terrain, past unstable obstacles, and through a small aperture. The archaeological site required movement over rocks and through horizontal and vertical turns. The robot tip successfully moved past the obstacles and through the tunnels, demonstrating the capability of vine robots to achieve real-world navigation and exploration tasks.