 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Tip Mount for Carrying Payloads using Soft Growing Robots
Dec 17, 2019
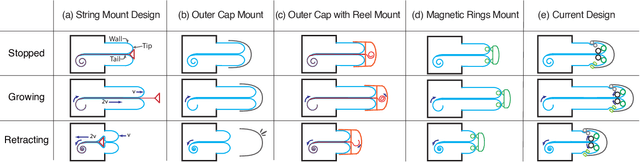
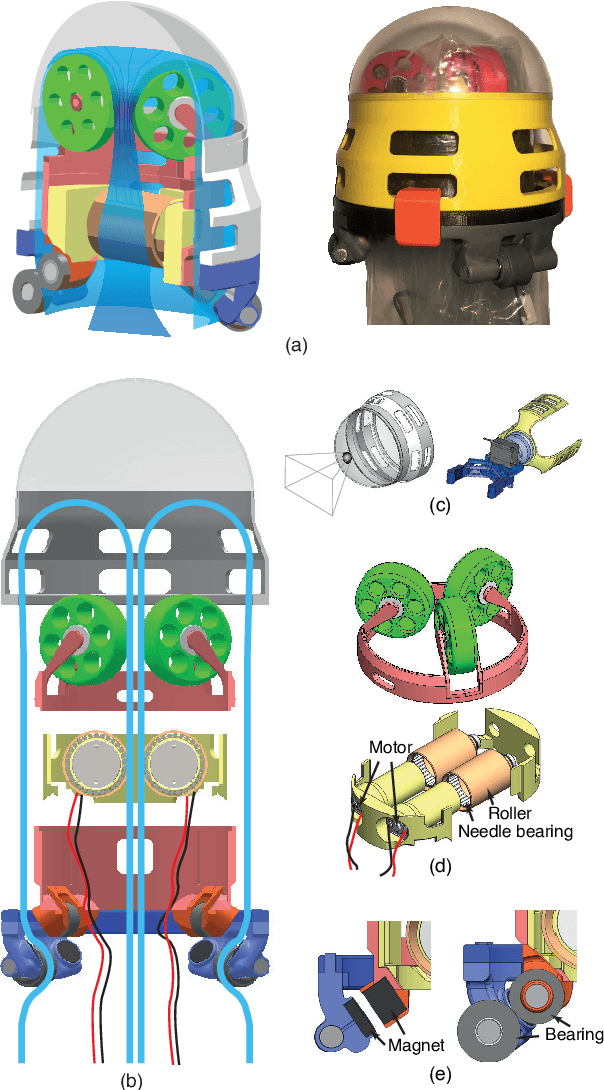
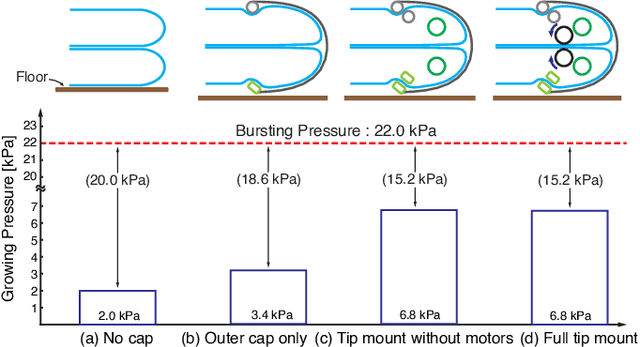
Pneumatically operated soft growing robots that lengthen through tip eversion can be used for inspection and manipulation tasks in confined spaces such as caves, animal habitats, or disaster environments. Because new material is continually emitted from the robot tip, it is challenging to mount sensors, grippers, or other useful payloads at the tip of the robot. Here, we present a tip mount for soft growing robots that can be reliably used and remain attached to the tip during growing, retraction, and steering, while carrying a variety of payloads, including active devices. Our tip mount enables two new soft growing robot capabilities: retracting without buckling while carrying a payload at the tip, and exerting a significant tensile load on the environment during inversion. In this paper, we review previous research on soft growing robot tip mounts, and we discuss the important features of a successful tip mount. We present the design of our tip mount and results for the minimum pressure to grow and the maximum payload in tension. We also demonstrate a soft growing robot equipped with our tip mount retrieving an object and delivering it to a different location.
Vine Robots: Design, Teleoperation, and Deployment for Navigation and Exploration
Feb 28, 2019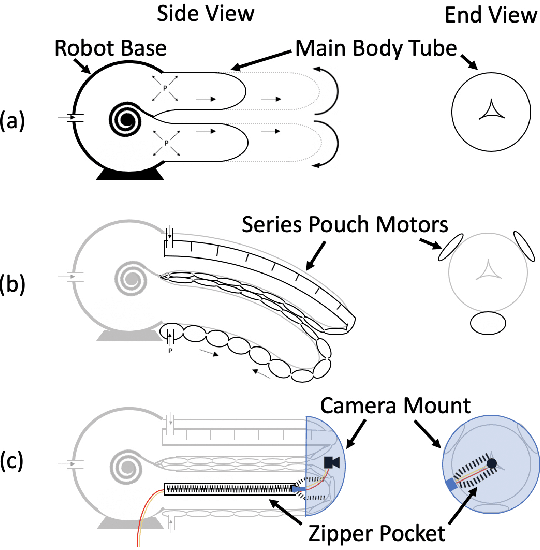
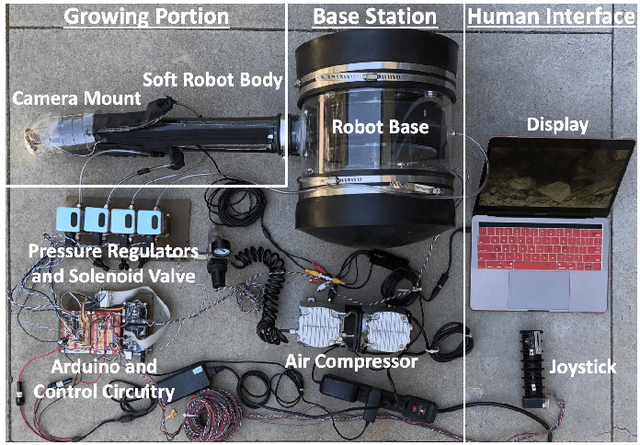
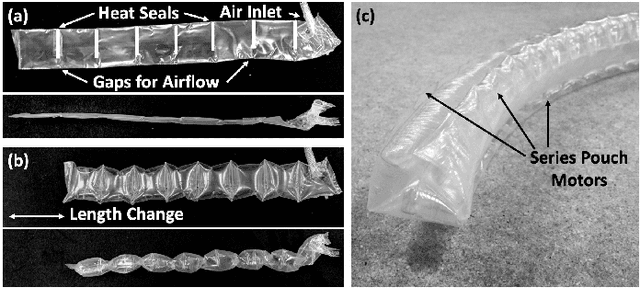
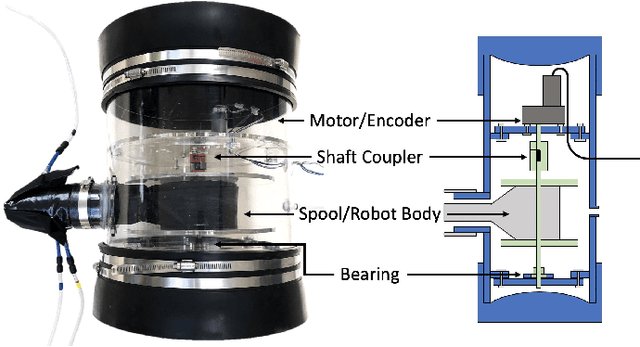
A new class of robots has recently been explored, characterized by tip extension, significant length change, and directional control. Here, we call this class of robots "vine robots," due to their similar behavior to plants with the growth habit of trailing. Due to their growth-based movement, vine robots are well suited for navigation and exploration in cluttered environments, but until now, they have not been deployed outside the lab. Portability of these robots and steerability at length scales relevant for navigation are key to field applications. In addition, intuitive human-in-the-loop teleoperation enables movement in unknown and dynamic environments. We present a vine robot system that is teleoperated using a custom designed flexible joystick and camera system, long enough for use in navigation tasks, and portable for use in the field. We report on deployment of this system in two scenarios: a soft robot navigation competition and exploration of an archaeological site. The competition course required movement over uneven terrain, past unstable obstacles, and through a small aperture. The archaeological site required movement over rocks and through horizontal and vertical turns. The robot tip successfully moved past the obstacles and through the tunnels, demonstrating the capability of vine robots to achieve real-world navigation and exploration tasks.